Изобретение относится к медиций-скОй технике, а именно к протезированию и протезостроению и может быть использовано при изготовлении протезов нижних конечностей с внешними источниками энергии.
Известен протез бедра, содержащий стопу, голеностопный шарнир, гильзы голени с пружиной, рычагом и регулируемыми упорами, каленный шарнир, гильзу бедра, пружинный аккумулятор, механизм периодического сброса энергии и электропривод l.
Недостатком этого протеза является то, что он не решает задач, связанных с управлением протезированной конечности в фазу переноса, что существенно снижает его функциональность и ограничивает его использование при протезировании инвалидов с высоким уровнем ампутации или с нарушениями функций тазобедренного сустава,
Наиболее близким к изобретению по технической сущности и достигаемому результату, является протез нижней конечности, содержащий последовательно соединенные голеностопный узел, гиль.зу голени, коленный шарнир, гильзу бедра, тазобедренный шарнир и полукорсет с приводным механизмом, электропривод с системой управлении 2.
Однако тазобедренный шарнир этого протеза в опорную фазу шага замкнут, поэто имеется несоответствие кинематики тазобедренного шарнира кинематике соответствующего сустава здоровой нижней конечности. Кроме того, в конструкции известного протеза отсутствуют узлы, предназначенные для коррекции параметров движения звеньев протеза в фазу переноса, что также приводит к отличию кинематических и динамических характеристик движения искусственной конечности от нормл. Все это осложняет обучение инвалидов пользованию такими конструкциями и требует выработки нового стереотипа ходьбы, отличного от нормы и компенсирующего недостатки механизма, это приводит к дополнительным затратам энергии на управление протезом.
К дополнительным затратам энергии и 1валида при пользовании таким протезом приводит также нерациональное азмещение наиболее массивного узла конструкции - приводного механизма, правляющего тазобедренным шарниром. тот Механизм размещен на большом асстоянии от оси вращения шарнира нутри гильзы голени, что приводит увеличению осевого момента инерции ротеза- в целом.
Цель -изобретения - снижение энергозатрат и ассиметрии ходьбы инвалиа с высокой ампутацией конечностей.
Поставленная цель достигается теи что Протез нижней конечности, содержащий последовательно соединенные голеностопный узел, гильзу голени, коленный шарнир,гильзу бедра, тазобедренный шарнир и полукорсет с приводным механизмом, электропривод с системой управления, снабжен корректирующим узлом, выполненным в виде цилиндра с поршнем и дросселя, при этом поршень посредством штока соединен с гильзой бедра, а сам цилиндр установлен на полукорсете, приводной механизм выполнен в виде упора, установленного .на гильзе бедра, и пружинного аккумулятора с толкателем, кулачка, установленного на выходном валу электропривода и соединенного с толкателем, контактирующим с упором.
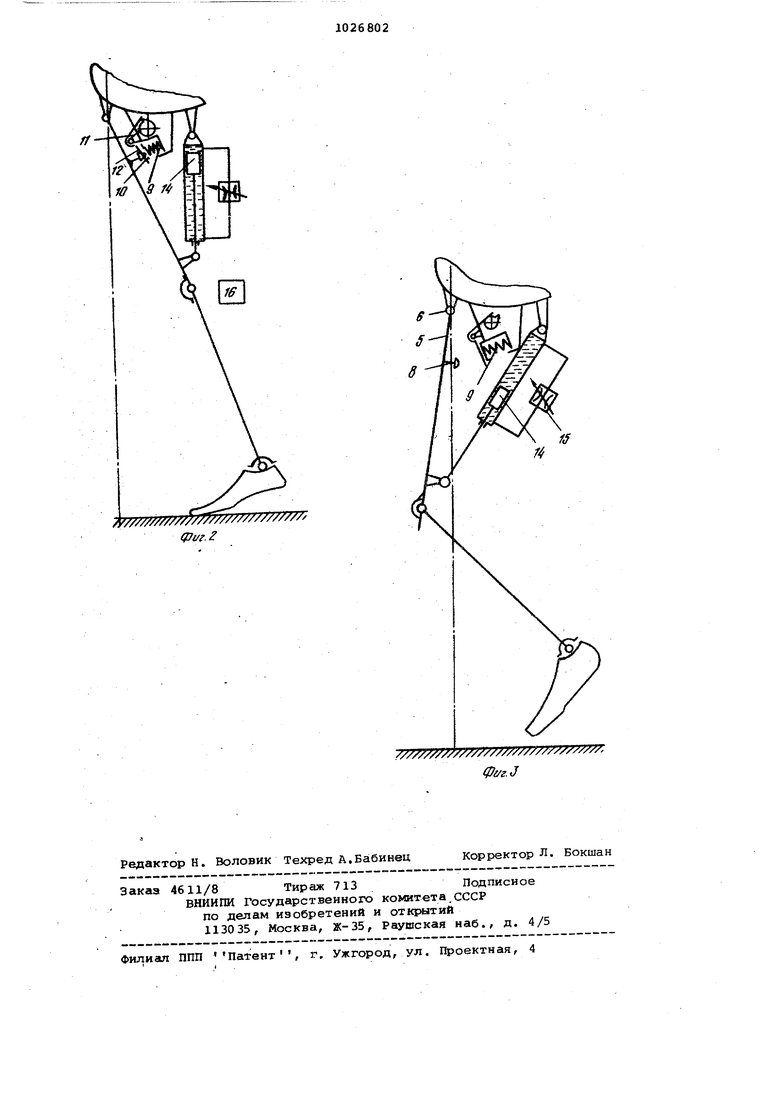
На фиг. 1- Показ аи ct кинематическай схема механизмов протеза в фазу переднего толчка; на фиг. 2 - то же, в одноопорную фазу; на фиг. 3 - то же, ,в фазу заднего толчака.
Протез содержит голеностопный узел, включающий искусственную стопу 1 с голеностопным шарниром 2, соединенным с гильзой 3 голени. Гильза 3 голени посредством коленного шарнира 4 соединена с гильзой 5 бедра, которая посредством тазобедренного шарнира 6 соединена с полукорсетом 7, Приводной механизм выполнен Ваиде упора 8, установленного на гильзе 5 бедра и Пружинного аккумулятора 9 с толкателем 10, кулачка 11 и ко(ромлсла 12. Кроме того, механизм протеза нижней конечности содержит корректирующий узел, выполненный в виде гидравлического демпфера, включающего цилиндр 13, поршень 14 со штоком и дроссель15, Цилиндр 13 шарнирно соединен с полукорсетом7, а шток поршня 14 шарнирно соединен с гильзой 5 бедра.
Кроме того, протез содержит сисTeN yl6 управления, подключенную к приводному механизму и к дросселю 15
Работа механизма протеза, начиная с фазы переднего толчка (фиг. 1) осущестнляется следующим образом.
Для обеспечения устойчивой ходьбы инвсшида необходимо обеспечить подкосоустойчивость в шарнирах протеза: голеностопном, коленном и тазобедренном, Подкосоустойчивость в первых двух шарнирах протеза обеспечивается традиционным способом - путем определенной cxeMJ построения Протеза, Подкосоустойчивость в тазобедренном шарнире б обеспечивается за счет использования корректирующего узла, выполненного в виде гидравлического демпфера. Для этого по команде системл 16 управления дроссель 15 Полностью перекрывает канал, сообщающий смежные полости гидравлического демпфера, что обеспечивается неподвижностью штока поршня по отношению к цилиндру,
Одновременно с началом фазы переднего толчка включается приводной ме санизм. Приводной, механизм, управляемый системой 16 управления, вращает кулачок 11 по часовой стрелке и через коромысло 12 и толкатель 10 сжимает пружинный акку1 лятор 9.Таким образом начинается процесс акку1 5/лирования энергии в пружинном аккуг ляторе 9.
Переход протеза-от фазы переднего толчка в одноопорную фазу ходьбы (полной опсдзы на протез) совершается за счет заднего толчка сохранившейся ноги инвалида. Для этого дроссель 15 открывает канал, сообщает смежные полости гидроцилиндра и гильза 5 бедра вращается относительно тазобедренногчэ шарнира по часовой стрелке. При этом поршень 14из крайнего нижнего положения перемещается вверх. Параметры движения поршня и протеза в целом регулируются дросселем 15, т.е. корректирующий узел обеспечивает регулирование моментов сил по командам система управления.
В одноопорную фазу ходьбы, наряду со сгибанием гильзы 5 бедра поотношению к тазобедренное шарниру, продолжается зарядка пружинного аккумулятора 9. В случае ускоренного сгибания гильзы 5 бедра, она своим упором 8 воздействует на коромысло 12 и толкатель 10 и, таким образ 6м, способствует работе приводного мёханиэма по зарядке пружинного акку1« лятор 9.
В фазу заднего толчка (фиг. 2) поршень.14 достигает крайнего верхнего положения, а пружинный аккумулятор 9 имеет запас потенциальной энергии, достаточной для последующего переноса протеза. По команде системы 16 управления кулачок 11 дополнительно поворачивается и посредством корокысла 12. и толкателя 10 освобождает пружинный аккумулятор 9 от защемления.
В фазу переноса (фиг. 3) усилие от пружинного.. акку лятора 9 через упор 8 Передается на гильзу 5 бедра и накопленная энергия реализуется для приведения в движение всей нижней конечности. Кинематические параметры перемещения нижней конечности относительно тазобедренного шарнира
6 регулируются дросселем 15. К концу фазы переноса механизмы протеза оказываются в исходном положении для выполнения следующего цикла двойного шага: пружинный аккумулятор 9 разряжен, а поршень 14 гидравлического демпфера находится в крайнем нижнем положении.
В начале фазы опоры описанный нлше Процесс работы нижней конечности возобновляется.
Таким образом, конструктивное расположение и построение выходного звена, обеспечивающее независимую работ приводного механизма по отношению к углово положению гильзы бедра, позволяет осуществлять взаимодействи приводного механизма с гильзой бедра только в необходимые фазы шага, не препятствуя в то же время перемещени ее в остайлееся время шага, т.е. движение искусственной конечности приближается к естественному.
Использование корректирующего узла, обеспечивающее формирование наперед заданных моментов сил сопротивления относительно тазобедренного шарнира, позволяет управлять тазобедренным шарниром по заданному закону, т.е. появляется возможность приблизить функцию передвижения искусственного тазобедренного шарнира к естественной, что устраняет необходимость выработки инвалидом негестественных координационных движений, а значит, уменьшает энергозатраты инвалида на управление этим протезом.
Размещение элементов приводного механизма на расстоянии более близком к объекту управления, тазобедpeHHoNV шарниру, по сравнению с известным устройством, позволяет уменьшить.осевой момент инерции систег ы на 40%.
Предлагаемое изобретение позволяет значительно уменьшить кинематическую и динамическую ассиметрию ходьбы- инвалида, снижает общие энергозатраты его организма за счет снижения энергозатрат, связанных с управлением протезом как в опорную, та и в переносную фазу, т.е. позволяет производить более полную социальнотрудовую реабилитацию наиболее трудного в протезировании контингента инвалидов с высокими ампутациями нижних конечностей.
/y/////////// ////7///////////f///
ф1/г.2
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез бедра | 1982 |
|
SU1074522A1 |
| Протез после вычленения бедра | 1985 |
|
SU1296148A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| Протез нижней конечности | 1977 |
|
SU664650A1 |
| ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ И ЧАСТИ ТУЛОВИЩА | 2001 |
|
RU2219875C2 |
| Протез после вычленения бедра | 1982 |
|
SU1088720A1 |
| Протез после вычленения бедра | 1981 |
|
SU978850A1 |
| Протез после вычленения бедра | 1986 |
|
SU1404072A1 |
| ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ | 1990 |
|
RU2008853C1 |
ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ, содержащий последоьа:тельно соединенные голеностопный узел, гильзу голени, коленныйшарнир,-гильзу бедра, тазобедренный шарнир и полукорсет с приводным механизмом, электропривод с системой управления,«о т л и ч а ю щ и и с я тем, что, с целью снижения энергозатрат и ассимметрии ходьбы инвалида с высокой ампутацией конечностей, он снабжен корректирующим узлом, выполнейным в виде цилиндра с поршнем и дросселя, при этом поршень посредством штока соединен с гильзой бедра, а сам цилиндр установлен на полукорсете, приводной механизм выполнен в виде упора, установленного на гильзе бедра, и пружинного аккумулятора с толкателем, кулачка, установленного на выходном g валу электропривода и соединенного с толкателем, контактирукадим с упором.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Протез бедра | 1979 |
|
SU835441A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
