Направляющая рамка 7 может поворачиваться вокруг оси 10 воздействием на подпружиненный рычаг 24 эксцентриков 25 или 27 и возвращается в исходное положение по истечении времени съемки кадра пружинами 32 и 33. Воздействием эксцентрика 29, связанного с дополнительным приводом 28, приводится в движение направля 1
Изобретение относится к панорамной съемке со сканирующим движением линзы или камеры и может быть использовано для компенсации поперечного сдвига изображения и компенсации вращения изображения в фотоаппаратах установленных на подвижное основание .
Цель изобретения - повышение качества изображения путем компенсации вращения изображения.
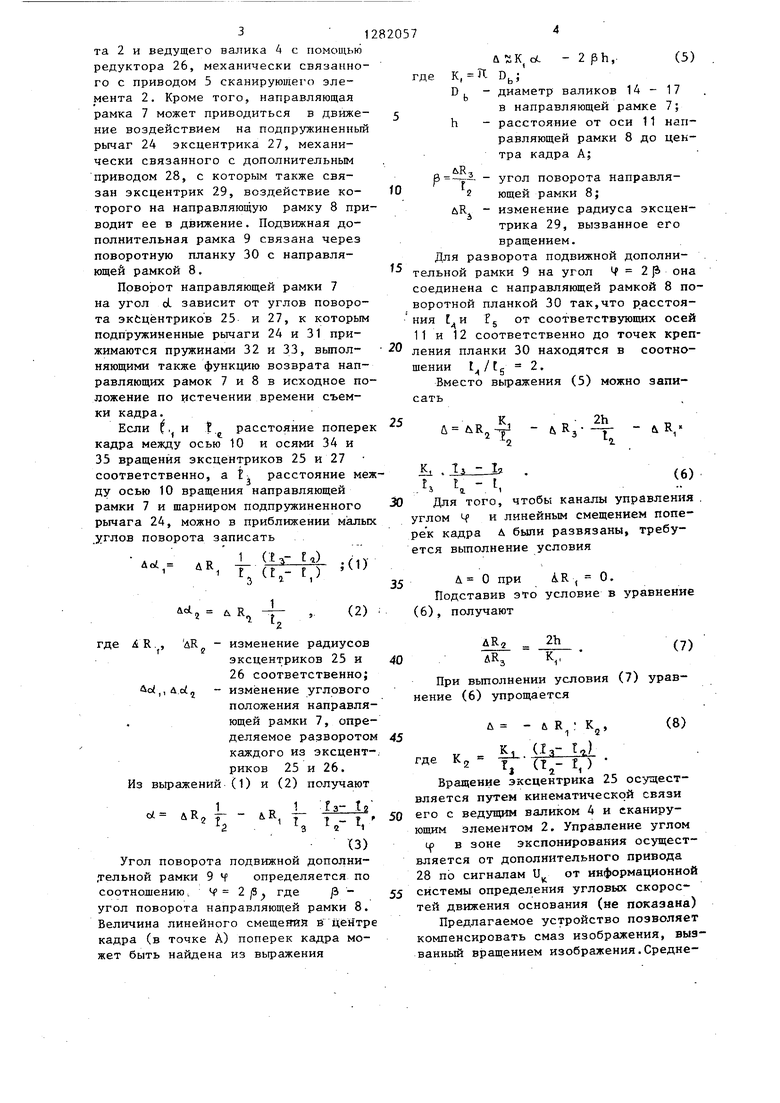
На фиг. 1 представлен панорамньй фотоаппарат, общий вид; на фиг. 2 - взаимное расположение рамок и пленки при повороте ее в зоне экспонирования; на фиг. 3 - схема реализации кинематической связи между рамками панорамного фотоаппарата.
Панорамный фотоаппарат содержит объектив 1, установленный на основании (не показано), сканирующий элемент 2, имеющий ось 3 вращения и связанный механически с ведущим валиком 4 и приводом 5 сканирующего элемента 2, причем ведущий валик 4 и привод 5 сканирующего элемента 2 закреплены на одном валу 6.
Направляющие рамки 7 и 8 и подвижная дополнительная рамка 9 установлены на основании с возможностью вращения вокруг своих вертикальных осей 10 - 12 соответственно, Дополнительная неподвщсная рамка 13 закреплена на основании. В направляющей рамке 7 закреплены попарно че- Tbipe (и более) валика 14 - 17, которые расположены по.следовательно один над другим. IB направляющей рамке 8 и дополнительных подвижной рамке 9 и неподвижной рамке 13 закреплена rio два (и более) валика 18-22 соответственно, расположенные после, ющая рамка 8. Рамка разворачивается через поворотную планку 30 дополнительную подвижную рамку 9. Управление углом поворота рамки 9 в зоне экспонирования осуществляется от дополнительного привода 28 по сигналам информационной системы определения угловых скоростей движения основания. 3 ил.
довательно один над другим,причем в дополнительной неподвижной рамке
13закреплен также ведущий валик 4. Панорамный фотоаппарат работает
следующим образом.
Сканирующий элемент 2 и ведущий валик 4 приводятся во вращение приводом 5 сканирующего элемента 2, скорость вращения которого определяется сигналом и „Qg задания. Изображение поступает на движущийся -сканирующий элемент 2 и от него через объектив 1 на пленку 23, которая протягивается валиком 4 в фокальной плоскости объектива 1 со скоростью равной скорости движения изображения. Пленка 23 движется по валикам
14и 15, образуя при этом на валиках 14 и 15 S-образную линию. Затем пленка 23 движется по валикам 20, 18, 21, 22, 19 и 4, образуя петлю в зоне экспонирования изображения, и далее проходит по валикам
16 и 17, образуя S-образную линию. Все валики, кроме ведущего валика 4, свободно вращаются вокруг своих осей (не показано). Направляющая рамка 7 приводится в движение от привода 5 сканирующего элемента 2, ведущего валика 4. Кроме того,направляющая 7 приводится в движение от дополнительного привода 28 по сигналу задания U . Одновремен- но приводится в движение направляющая рамка 8, кинематически связанная с дополнительным приводом 28 и направляющей рамкой 7.
Направляющая рамка 7 поворачивается вокругоси 10 воздействием на
подпружиненный рычаг 24 эксцентрика 25, движение которого синхронизиро- : вано с движением сканирующего элемен
та 2 и ведущего валика 4 с помощью редуктора 26, механически связанного с приводом 5 сканирующего элемента 2, Кроме того, направляющая рамка 7 может приводиться в движение воздействием на подпружиненный рычаг 24 эксцентрика 27, механически связанного с дополнительным приводом 28, с которым также связан эксцентрик 29, воздействие которого на направляющую рамку 8 приводит ее в движение, Подвижная дополнительная рамка 9 связана через поворотную планку 30 с направляющей рамкой В,
Поворот направляющей рамки 7 на угол oL зависит от углов поворота эксцентриков 25 и 27, к которым подпружиненные рычаги 24 и 31 прижимаются пружинами 32 и 33, выполняющими также функцию возврата направляющих рамок 7 и 8 в исходное положение по истечении времени съемки кадра.
Если ., и I расстояние попере кадра между осью 10 и осями 34 и 35 вращения эксцентриков 25 и 27 соответственно, а ti расстояние меду осью 10 вращения направляющей рамки 7 и щарниром подпружиненного рычага 24, можно в приближении .углов поворота записать
1 (U- )
AR Т
(„- Е )
1
J(1)
Ad,
А R.
де К, JX D
Л ЙК oL
- 2ph,.
(5)
ь
-диаметр валиков 14 - 17 в направляющей рамке 7;
-расстояние от оси 11 направляющей рамки 8 до центра кадра А;
7
р
uR
uR, угол поворота направляющей рамки 8; изменение радиуса эксцентрика 29, вызванное его вращением.
Для разворота подвижной дополни- тельной рамки 9 на угол Ч 2 она соединена с направляющей рамкой 8 поворотной планкой 30 так,что расстояния ии Eg от соответствующих осей
f.
11 и 12 соответственно до точек крепления планки 30 находятся в соотношении 1 / tg 2.
Вместо вьфажения (5) можно эапи-
сать
,j- & Rj2h l«
- &R,
Ь.
t.
30
1д - Ь
. -.
(6)
35
Для того, чтобы каналы управления углом Ч и линейным смещением попе- ре к кадра А быпи развязаны, требуется вьтолнение условия
Л О при A.R , 0. Подставив это условие в уравнение (6), получают
где
R,,
лк. изменение радиусов эксцентриков 25 и 26 соответственно; , изменение углового положения направляющей рамки 7, определяемое разворотом каждого из эксцент-. риков 25 и 26. Из выражений (1) и (2) получают
ti
ХЗ)
Угол поворота подвижной дополни- .тельной рамки 9 V определяется по соотношению, Ч 2 |3 . где р - угол поворота направляющей рамки 8. Величина линейного смещения в цеНтре кадра (в точке А) поперек кадра может быть найдена из выражения
ot ARj
ARj ДК,
2h
КГ
(7)
При вьшолнении условия (7) уравнение (6) упрощается
U - л K,j, (8)
К, (.1я- tj где К,, Т7 ТТ7
Вращение эксцентрика 25 осуществляется путем кинематической связи его с ведзпцим валиком 4 и сканирующим элементом 2. Управление углом
1 в зоне экспонирования осуществляется от дополнительного привода 28 по сигналам U от информационной системы определения угловых скоростей движения основания (не показана)
Предлагаемое устройство позволяет компенсировать смаз изображения, вызванный вращением изображения.Среднеквадратичный смаз изображения в этом случае определяется как
в
Q
Я
де
Я
ВР
а
2.
ftp -э -epi 3 время экспонированияJ скорость вращения фотоаппарата вокруг оптической оси;
размер экспонирумого участка пленки.
Формула изобретения
Панорамный фотоаппарат,содержащий установленные на основании объектив, ведущий валик, привод ведущего валика, направляющую для пленки, выполненную в виде двух направляющих рамок, установленных на вертикальных осях и связанньк между собой и с приводом сканирующего элемента через подпружиненные рычаги, каждьй из которых закреплен на соответствующей направляющей рамке, содержащей расположенные последовательно друг над другом валики, отличающий- с я тем, что, с целью повышения качества изображения путем компенсации поперечного сдвига изображения, Б него введен дополнительный привод, а направляющая( для пленки снабжена неподвижной и подвижной дополнительными рамками с валиками, расположенными друг над другом, причем ведущий валик закреплен в неподвижной дополнительной рамке, связанной, жестко с основанием, а подвижная дополнительная рамка установлена с возможностью
вращения вокруг вертикальной оси и соединена через введенную поворотную планку с одной из направляющих рамок, каждая из которых связана через подпружиненный рычаг с двумя
введенными эксцентриками, один из которых соединен с приводом ведущего валика, а второй - с дополнительным приводом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Панорамный фотоаппарат | 1985 |
|
SU1273864A1 |
| Панорамный фотоаппарат | 1983 |
|
SU1151913A1 |
| Панорамный фотоаппарат | 1979 |
|
SU847254A1 |
| Механизм транспортировки пленки в фотоаппарате с устройством повторного экспанирования | 1985 |
|
SU1267342A1 |
| ФОТОГРАФИЧЕСКИЙ АППАРАТ | 1972 |
|
SU340213A1 |
| Затвор для панорамного фотоаппарата | 1990 |
|
SU1739352A1 |
| Установка для съемки быстропротекающих процессов | 1984 |
|
SU1282058A1 |
| ПАНОРАМНЫХ ФОТОАППАРАТОб | 1968 |
|
SU217205A1 |
| Ремизоподъемная каретка к ткацкому станку | 1976 |
|
SU735680A1 |
| Устройство для управления транспортированием пленки в фотоаппарате | 1989 |
|
SU1652957A1 |

Изобретение может быть использовано для компенсации поперечного сдвига изображения в фотоаппаратах, установленных на подвижном основании. Цель изобретения - повышение качества изображения путем компенсации его вращения. Изображение поступает на движущийся сканирующий элемент 2 и от него через объектив 1 - на протягиваемую ведущим валиком 4 пленку 23. При движении по дополнительным валикам 18-22 пленка образует петлю в зоне экспонирования изображения. JJ Ц 28 i W
f2
Фи8.2.
ю.
J2
зкмл
.
8
П
-9 12
.J
2
25
Редактор М.Бланар
Составитель В.Панфилова
Техред И.Попович Корректор А.Тяско
Заказ 7264/44 Тираж 421Подписное
ВНРШПИ Государственного комитета СССР . .
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(риг.З
| Патент США № 3160882, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Панорамный фотоаппарат | 1983 |
|
SU1151913A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
