скважности, цепь включения которого подключена к выходу блока формирования управляЮ1чего сигнала яа останов, а выход указанного генератора подключен к цепям управления ключей преобразователя частотя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1164849A1 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1095321A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1277342A2 |
| Вентильный электропривод | 1985 |
|
SU1317630A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Способ управления вентильным электродвигателем в режиме стопорения ротора | 1985 |
|
SU1300616A1 |
| Вентильный электродвигатель | 1989 |
|
SU1677839A2 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, содержаудее преобразователь частоты, цепи управления ключей которого связаны с выходомm-канального датчика положения ротора, последовательно соединенные управляемые блок Запрет и блок формирования сигналов правого и левого направлений вращения, управляющий вход которого подключен к выходу логической схемы Исключающее ИЛИ два входа которой связаны с выходом задатчика направления вращения и выходом триггера команд Пуск и Стоп соответственно,.датчик нулевой скорости враидения, выход которого связан с управляюи им входо15 блока Запрет, о т л и ч а ю UI е ее я тем, что, с целью повышения надежности путем исключения свободных движений индуктора вентильного электродвига- теля после останова, в него дополнительно введены управляемый блок задания постоянного вкгяочения комбинации ключей преобразователя частоты и блок формирования управляющего сигнала на останов, включенный между блоком 3 прет и датчиком нулевой скорости вращения, .выход которого дополнительноподключен к первому управляющему BXQду блока задания постоянного включения комбинации ключей преобразователя частоты, информационные входы которого подключены к соответствующим выходам блока формирования сигнала правого и левого направлений вращения, а второй управляющий вход указанного блока задания подключен к выходу триггера команд Пуск и Стоп, выход блока задания постоянного включения комбинации кгиочей преобразователя частоты подключен к цепям управления ключей преобразователя частоты. И. Устройство по п. 1, о т л и чающееся тем, что блок задания постоянного включения комбинаций ключей преобразователя частоты содер. житМБ-триггеров, причем информационные входы С-триггеров подк/вочены к соответствующему выходу блока формирования сигнала правого и левого направлений вращения, тактирующие входыD-триггеров объединены в первый управляющий вход указанного блока задания, входы установки начального состояния- Д-триггеров объединены во вторьй управляЮиГий вход, а выходы В-триггеров являются выходами блока «задания постоянного включения комбинаций ключей преобразователя частоты. 3. Устройство по п. 2, отлич аю щ е ее я тем, что оно снабжено генератором импульсов регулируемой
Изобретение относится к электротехнике, в частности к электроприводу, и может fSbiTh использовано в системах и устройствах, где требуется экстренное торможение, например в позиционном приводе в приводах робототехники и т „д.
Известные вентильные электродвига тели с устройствами, обеспечивающими динамическое и генераторное торможение f 1 3.
Недостатком таких устройств торможения вентильных электродвигателей являетсяТО, что требуется дополнительная установка силовых выпрямительных мостов и реле, коммутирующих силовые цепи,.
Известен вентильный электродвигатель, содержащий преобразователь частоты, управляемый от трансформаторного датчика положения ротора с первичной обмоткой, подключенной через реверсивный элемент. Торможение электродвигателя осуществляется противовключением L 2 .
Однако данное устройство не обеспечивает автоматической блокировки при нулевой частоте вращения, а поэтому не исключает вращения ротора в противоположном направлении при торможении..
Наиболее близким к изобретению является устройство для управления вентильным электродвигателем, содержа щее преобразователь частоты, цепи управления к/йочей которого связаны свыходом многоканального датчика положения ротора через последовательно соединенные управляемые блок Запрет и блок формирования сигналов правого и левого направления вращения, управляющий вход которого подключен к выходу логической схемы Исключающее ИЛИ, к двум входам логической схемы Исклочающее ИЛИ подкгиочены выход задатчика направления вращения и выход триггера команд Пуск и Стоп, датчик нулевой скорости вращения, выход которого связан с управляющим входом блока Запрет ГзЗ
Недостатком известного технического решения является низкая V aдeжность, обусловленная возможностью свободных движений индуктора после останова. Эти движения могут возникнуть под действием изменяющихся моментов нагрузки на валу электродвигателя Наличие свободных движений вентильного электродвигателя в режиме останова может привести к неработоспособности приводных устройств, например позиционных приводов, приводов робототехники и т.д.
Цель изобретения - повышение надежности путем иск/яочения свободных дви.жений индуктора вентильного электродвигателя после останова.
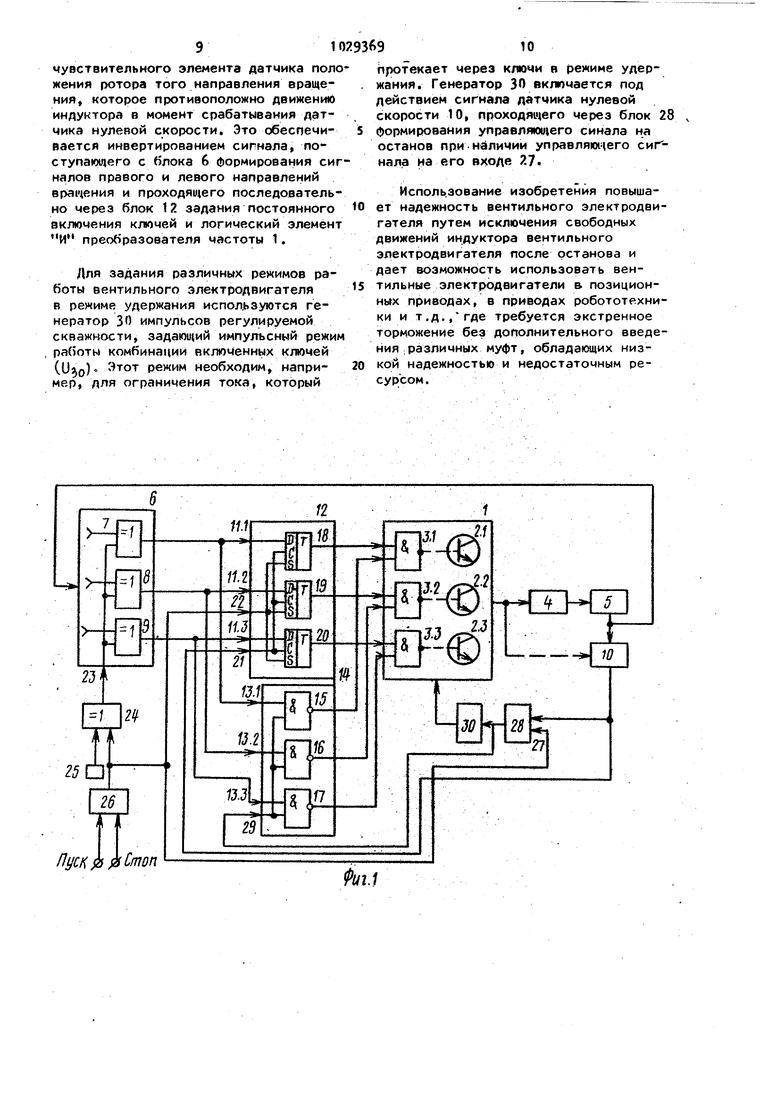
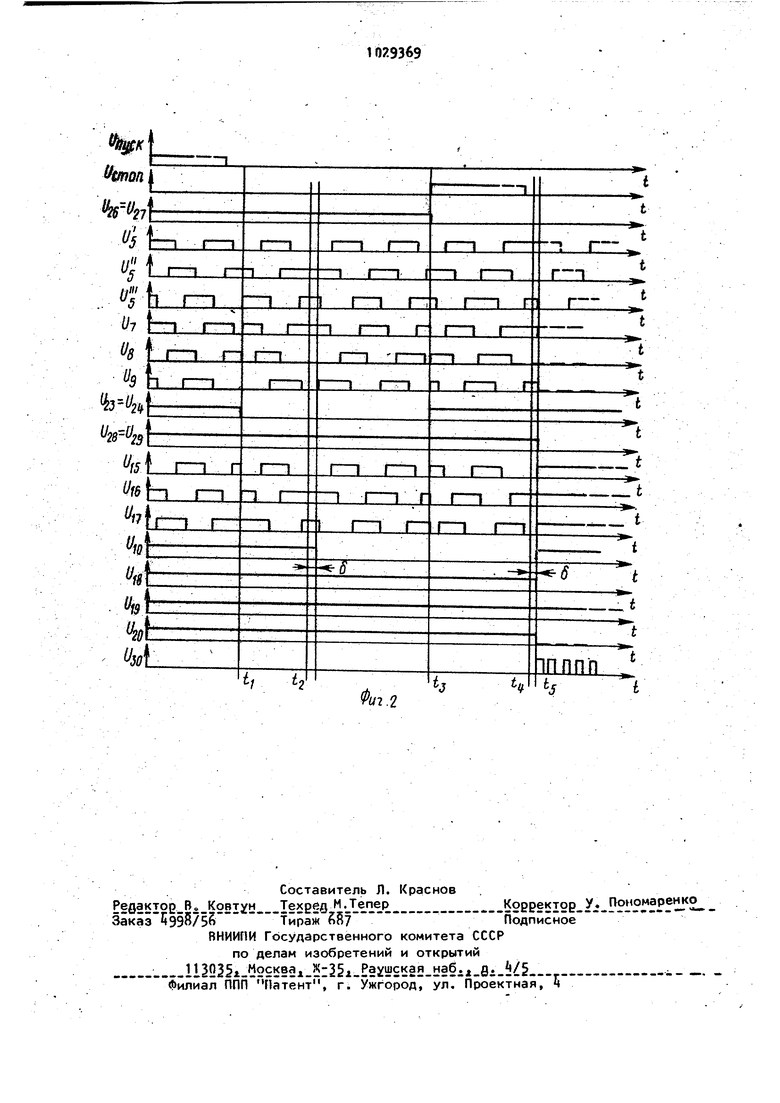
Поставленная цель достигается тем, что в устройство для управления вентильным электродвигателем, содержащее преобразователь частоты, цепи управления ключей которгаго связаны с выходомm-канального датчика положения ротора, последовательно соединенные управляемые блок Запрет и блок формирования сигналов правого и левого направлений вращения, управляющий вход которого подключен к выходу логическс схемы Искяочающее ИЛИ, два входа которой связаны с выходом задатчика направления вращения и выходом триггера команд Пуск и Стоп соответственно, датчик нулевой скорости вращения, выход которого связан с управляющим входом блока Запрет, дополнительно введены управляемый блок задания постоянного включения комбинации ключей преобразователя частоты и блок формирования управляющего сигнала на останов, включенный между блоком Запрет и датчиком нулевой скорости Вращения, выход которого дополнительно подключен к первому управляющему входу блока задания постоянного включения комбинации ключей преобразователя частоты, информационные входы которого подключены к соответствуюи(им выходам блока формирования сигнала правого и левого направлений вращения, а второй управлякхчий вход указанного блока заДания подключен к выходу триггера конанд Пуск и Стоп, выход блока задания постоянного включения комбинации ключей преобразователя частоты подключен к цепям управления ключей преобразователя частоты. Кроме того, блок задания постоянного включения комбинации ключей пре образователя частоты содержит mD-три repOBi причем информационные входы 1)-триггеров подключены к соответствуЮ1 ему выходу блока формирования сигнала правого и левого направлений вращения тактирующие входыD-триггеров объединены в первый управляЮ1ЦМЙ вход указанного блока задания, входы установки начального состояния 3)-триггеров объединены во второй управляющий вход, а выходы Х-три геров являются выходами блока задания постоянного вкгяочения комбинации ключей преобразователя частоты. Устройство снабжено генератором 1импульсов регулируемой скважности, цепь включения которого подключена к выходу блока формирования управляю «чего сигнала на останов, а выход ука занного генератора подключен к цепям управления ключей преобразователя частоты. На фиг. 1 изображена функционально-структурная схема устройства для управляения вентильным электродвигателем; на фиг. 2 - эпюры напряжений, поясняю1чие работу устройства. Устройство состоит из Преобразова теля частоты 1 (фиг. 1), включаюи его а себя к/яочи ..}, .,., 2.3, цепи управления которых связаны с выходами логических элементов И-НЕ 3.1, 3.2, 3.3. Выход преобразователя частоты t подкшмен к. якорной обмотке синхронной машины , на валу которой установлен датчик 5 положения ро тора. Датчик 5 положения ротора соединен с блоком 6 формирования сигна лов правого и левого направлений вра |)1ения, состоящим из логических элементов Исключающее ИЛИ 7,В и 9 и с датчиком нулевой скорости 10. Выходы блока 6 формирования сигналов правого и левого направлении вращения соединены с информационными выходами 1 11.1, 11.2, 11.3 блока 12 задания по стоянного включения комбинации ключе преобразователя частоты и с выходами 13.1, 13.2, 13.3 блока 1 Запрет содержащего логические элементы И 15, 16 и 17. Блок 12 задания постоянного включения комбинации ключей преобразователя частоты 1 состоит из Р-триггеров 18, 15 и 20, тактирующие входы которых объединены в первый управляюи(ий вход 21 указанного блока 12 задания, входы установки начального состоянияD-триггеров 18, 1$ и 20 объединены во второй управляющий вход 22, информационные входы О-триггеров являются входами блока 12 задания постоянного включения комбинации КЖ1чей преобразователя частоты 1, а выходы ЗЭ-триггеров являются выходами указанного блока, которые вместе содноименными выходами блока Н Запрет подключены попарно к входам логическиу схем И-НЕ 3. Управляющий вход 23 блока 6 формирования сигналов правого и левого направлений вра- 1цения соединен с выходом логической схемы Исключающее ИЛИ 2, к двум входам которой подключены входы задатчика 25 направления вращения и выход триггера 26 команд Пуск и Стоп. Выход тригге{ 2б команд Пуск и Стоп также подкгючен к управляюи4ему входу 27 блока 28 формирования управляю1цего сигнала на останов и к второму управлякмчему входу 22 блока 12 задания постоянного включения комбинации ключей пре образователя частоты Выход датчика нулевой скорости 10 соединен с входом блока 28 формирования управляющего сигнала на останов и первым управляю1цим входом 21 блока 12 задания постоянного включения комбинации ключей. Выход блока 28 формирования управляющего сигнала на останов подключен к управляющему -входу 29 блока Запрет Ник генератору 30 импульсов регулируемой скважности. Выход указанного генератора 30 подключен к цепям управления ключей преобразователя частоты 1. В зависимости от типа используемого датчика нулевой скорости 10 его вход может быть подключен или к выходу датчика 5 положения ротора, или к выходу преобразователя частоты 1. При подаче сигнала Пуск на выходе триггера команд Пуск и Стоп 26 устанавливается уровень логической 1 же уровень( присутствует на управляюи ем входе 27 51 блока 28 формирования управляющем си нала на останов, не разрегиая ему пер давать информацию с датчика нулевой скорости 10, и на втором управляющем входе 22 блока 12 задания постоянного включения комбинации к/яочей. Это обеспечивает принудительную установку на выходе указанного блока 12 лохГической 1. Сигналы выхода датчи . г ка 5 положения ротора (и V | фиг. 2) поступают на входы блока 6 формирования сигналов правого и лево го направления вращения, где формиру ются сигналы управления заданного направления вращения {U7 Uc U). Направление варицения зйдаетсчя задатчиком 25 направления вращения через логический элемент Исключающее ИЛИ . Уровень логической t(U24/ на выходе логического элемента Искя Чаюи ее ИЛИ.2 соответствует направлению вращения ротора вентильного электродвигателя вправо,При наличии логической 1 на одном из вхо дов логических элементов Исключающее ИЛИ 7, 8 и 9 блока и формирования сигналов правого и левого направ ления вращения информацию, предшествующую на другом входе, они передают без изменения, а при наличии логичес кого О на том же входе они работа ют в режиме инвертора. Это обеспе чивает формирование сигналов управления противоположного направления вра щения. Сигналы управления с указанного блока 6 поступают на входы t3.1, 13.2 13оЗ блока 1 Запрет, на управляющем входе 29 которого имеет место логическая 1() ® выходе блока Н Запрет сигналы инвертирзтотся (U-(5, U-ff, , U-t7 ) поступают на первые входы логических элементов.3.1, , 3.3 преобразователя частоты 1,. на вторых входах которых имеет место уровень логической 1 (, ( при этом они работают в режиме инверторов. На выходе логических элементов И-НЕ 3.1, 3.2, 3.3. имеют место сигналы, аналогичные сигналам, сформированным в блоке 6 формирования сигналов правого и левогд направления вращения. Под действием этих сигналов преобразователь частоты 1 через ключи 2.1, 2.2, 2.3 управляет якорной обмоткой синхронной машины . С изменением сигнала управления на реверс (момент времени-Ь )происходит инвертирование сигналов датчи696ka 5 положения ротора в блоке 6 формирования сигналов правого -и левого направления вращения. Преобразователь частоты 1 формирует последовательную комбинацию открытых состояний ключей 3.1, 3.2, 3.3, при которой вентильный двигатель на интервале времени 4 ...-t2 тормозится, а затем на интервале t,...tjРазгоняется в противоположную сторону. В момент реверса блок Т Запрет не запрещает прохождение сигналов с блока 6 формирований сигналов правого и левого направлений вращения, так как не было команды Стоп и сигнал датчика 10 нулевой скорости не смог пройти через блок 28 формирования управляющего сигнала на останов, на управляю1цем входе 27 которого присутствует уровень логической 1. ftpH подаче команды CTon(fe,,) на выходе триггера 26 команд Пуск и Стоп устанавливается уровень логического и, логическая схема Исклю.чающее ИЛИ 2 начинает работать в режиме инвертора и сигнал (Л-,дна ее выходе 13мен ет свой уровень. При изменении управляющего сигнала U23 блок 6 формирования сигналов правого и левого направлений вращения форми.рует из сигналов датчика 5 положения ротора управляющие сигналы, под действием которых преобразователь частоты 1 формирует последовательную комбинацию открытых состояний ключей 2.1 2.2, 2.3, при которой вентильный электродвигатель переходит в режим торможения противрвключениемо Этот режим позволяет электродвигателю наиболее близко достичь нулевой скорости (4) . При нулевой скорости вращения с датчика нулевой скорости 10 поступает сигнал на управляющий вход 29 блока I Звпрет и проходит через блок 28 формирования управляющего сигнала на останов, на управляющем входе которого устанавливается уровень логического О при появлении команды Стоп, Подача сигнала с датчика нулевой скорости 10 может про.исходить в общем случае с погрешностью сГ . Наличие на упра0ляюи1ем входе 29 уровня логического О при нулевой скорости приводит к запрету прохождения сигналов через блок 1 Запрет. Уровень логической 1 с выхода атчика нулевой скорости 10 при нуле.вой скорости вращения одновременно поступает на первый управляющий вход 2 блока 12 задания постоянного включения комбинации к/)чей преобразователя частоты 1, на втором управляющем входе 22 которого имеет место уровень логического О при команде Стоп. Такое сочетание уровней напряжения при нулевой скорости вращения приводит к запоминанию комбинации упраеляю1чих сигналов на выходе блока 12 задания постоянного включения комбинации ключей преобразователя частоты 1. Зафиксированная комбинация состояний управляющих сигналов в блоке 6 формирования сигналов правого и левого направлений вращения инвертируется в логических элементах И-HF. и подается непосредственно к цепям управления ключей преобразователя частоты 1. Это приводит к тому, что при нулевой скорости вра щения происходит включение определен ной комбинации ключей преобразовател частоты t, которая обеспечивает фиксацию ротора вентильного электродвигателя после останова. Режим, при котором включена неизменная комбинация ключей 2o1i 2.., 2.3, продолжается до момента подачи команды Пуск При подаче команды Пуск на втором управляюи1ем входе 22 блока 12 задания постоянного включения комбинации ключей преобразователя частоты 1 и управляющем входе 27 блока 28 появляются уровни логической 1. Это обеспечивает принудительную установку на выходе блока 12 задания постоянного включения комбинации кгяочей 2.1, 2.2, 2.3 и на выходе блока 28 формирования управляющего сигнала на останов уровня логической М, при кЬтором логические элементы И и блок Vk Запрет работают в режиме инвертирования сигнала. Дальнейшая работа электродвигателя продолжается по вы1иеопйсанному способу. 8 момент перехода на режиме торможения в режим останова происходит фиксация ротора вентильного электродвигателя включением комбинаций открытых состояний ключей- преобразователя частоты 1. При этом имеет место переходный процесс из одного режима в другой о На этот переходный процесс .оказы ет влияние как величина нагрузки на валу вентильного электродвигателя, так и погрешность в определении нул вой скорости вращения сГ В зависи 98 ости от требований к качеству и вреени переходного процесса необходио включить ту или иную комбинацмо ткрытых состояний ключей преобразоателя частоты 1. Рассмотрим переходной процесс во ремя останова вентильного электровигателя при работе с реальным датиком нулевой скорости, например, отицательную угловую погрешность измеения нулевой скорости вращения , где Т; такт коммутации вентиль ного электродвигателя с однополупериодным преобразователем частоты;VW - число секций якорной обмотки синхронной машины. При такой погрешности датчик выда ет сигнал, когда ротор уже изменит напруавлеиие вращения. Допустим ротор вра1цается влево. При команде Стоп устройство для управления вентильным электродвигателем обеспечивает формирование последовательных комбинаций открытых состояний ключей, при которых вентилы й преэлектродвигатель переходит в режим торможения противовключением. Это эквивалентно пеоеходу в управлении на другой комплект чувствительных элементов. До достижения -нулевой скорости направление вращения ротора не изменится, В момент нулевой скорости ротор мЪжет занять произвольное положение. В зоне действия сигнального элемента находится Чувствитепьный элемент, который управляет включением одной из секций якорной обмотки синхронной машины. Под действием ее магнитодвижущей силы ротор изменяет свое направление вращения. В этот момент датчик нулевой скорости зафиксирует нулевую скорость с отрицательной погре1иностью cf. Для того, чтобы исключить свободное движение индуктора при отсутствии команды Пуск, необохдимо оставить подключенной к источнику питания какую-либо секцию якорной обмотки синхронной машины. Уменьшение йремени переходного процесса при наличии отрицательной погрешности измерения нулевой скорости в датчике нулевой скорости 10 достигнуто фиксацией ротора вентильного электродвигателя включением секции, управляемой от чувствительного элемента датчика поло жения ротора того направления вращения, которое противоположно движению индуктора в момент срабатывания датчика нулевой скорости. Это обеспечивается инвертированием сигнала, поступающего с блока 6 формирования сиг налов правого и левого направлений вращения и проходящего последовательно через блок 12 задания постоянного аклочения клочей и логический элемент преобразователя частоты 1. Для задания различных режимов работы вентильного электродвигателя в режиме удержания используются генератор 30 импульсов регулируемой скважности, задаодий импульсный режи ра(5оты комбинации включенных клочей (иАл)° Зтот режим необходим, например, для ограничения тока, который протекает через ключи в режиме удержания. Генератор 30 включается под действием сигнала датчика нулевой скорости 10, проходящего через блок 28 формирования управляюи его синала на останов при-наличии управ ляю11его сигнала на его входе 27. Исполь.зование изобретения повышает надежность вентильного электродвигателя путем исключения свободных движений индуктора вентильного электродвигателя после останова и дает возможность использовать вентильные электродвигатели в. позиционных приводах, в приводах робототехники и т.д.,где требуется экстренное Торможение без дополнительного введения ; различных муфт, обладающих низкой надежностью и недостаточным ресурсом.
и
о
07
8
щ %
п
(/2в %|%1
