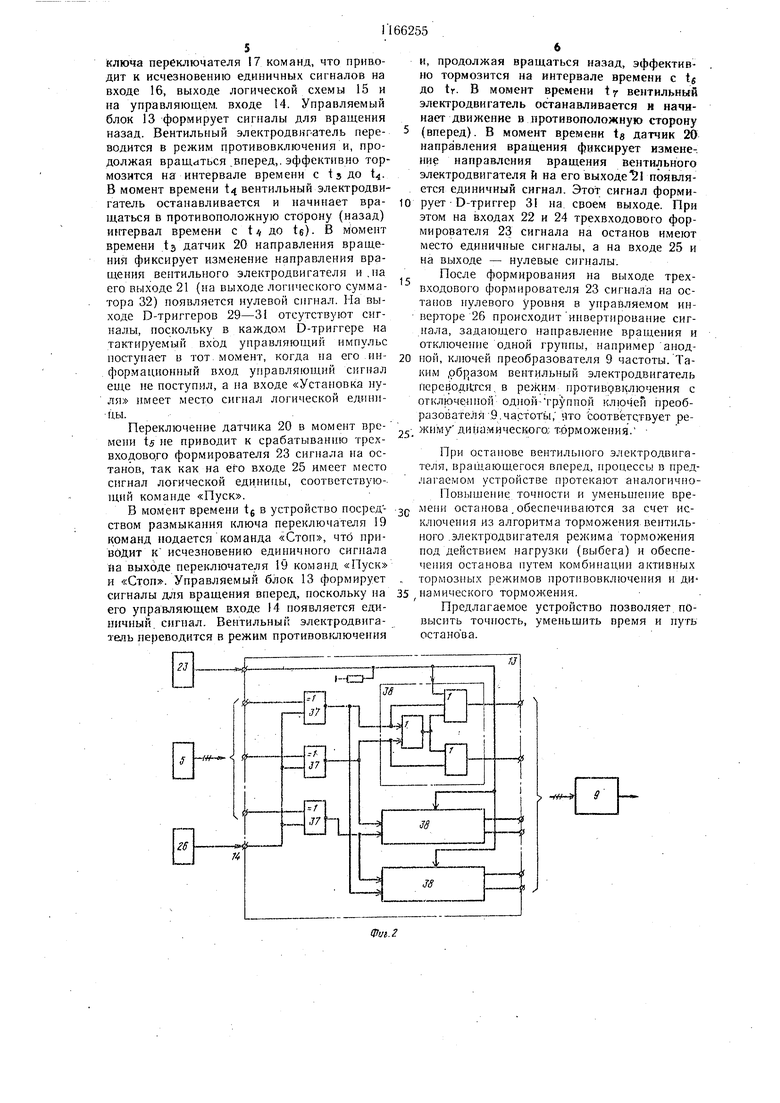
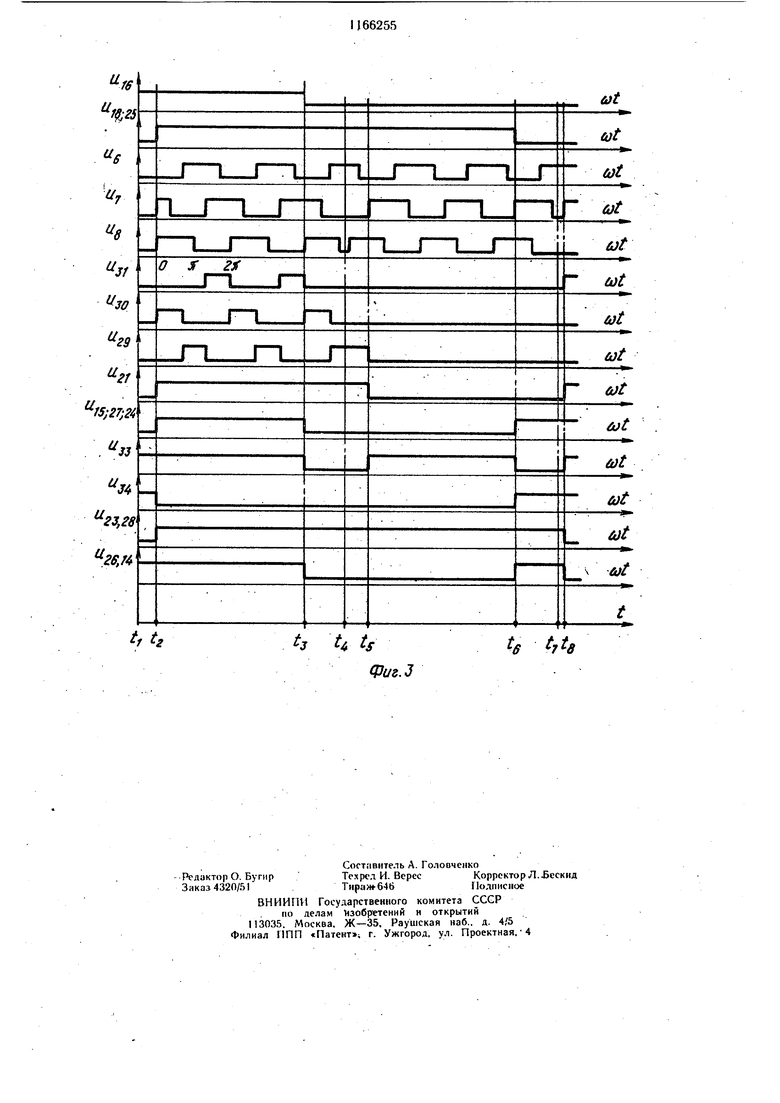
Изобретение относится к электротехнике и может быть использовано в системах и устройствах,, где требуется экстренное торможение с минимальным выбегом и точный осТанов в заданной точке, например в позиционном приводе, в приводах робототехники и т.д. По основному авт. св. № 1029368 известно устройство для управления вентильным электродвигателем, содержащее преобразователь частоты, цепи управления ключами которого связаны с выходом т-кан льного датчика положения ротора через управляемый блок формирования сигналов правого и левого направления вращения, первый управляющий вход которого подключен к выходу первой логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, два входа которой связаны с входом задатчика направления вращения и выходом триггера команд «Пуск и «Стоп соответственно, подключенный к выходу т-канального датчика положения ротора датчнк-направления вращения и трехвходовый формирователь управляющего сигнала на останов, выход которого подключен к второму управляющему входу блока формиропания-сиг 1алов правого и левого направлепий вращения, причем к первому входу трехв.ходового формирователя управляющего сигнала на останов подключен выход датчика направления вращения, к второму входу указанного формирователя - выход первой логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а к третьему входу - выход триггера команд «Пуск и «Стоп 1. Недостатками известного устройства управления являются низкая точность позиционирования и достаточно больщое время торможения. Это объясняется тем, что устройство формирует сигнал на останов, когда вентильный электродвигатель уже изменил направление вращения и разогнался на угловом интервале, соответствующем угловой погрешности датчика направления вращения. Время торможения вентильного электродвигателя на выбеге в эт.ом случае, становится зависимым .от. приложенного момента нагрузки и может превыщать время торможения вентильного электродвигателя с нолинальной частоты вращения до нуля в режиме противовключения. Таким образом, путь, пройденный, вентильным электродвиателем на выбеге, является непрогнозируемымЦель изобретения - повыщение точноети и уменьшение времени останова вентильного электродвигателя.. Поставленная цель достигается тем, что в устройство, введен. управляемьш инвертор с информационным и управляющим входами, включенный по информационному входу и выходу между выходом первой логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ и управт ляющим входом блока формирования сигналов правого и левого направлений вращения соответственно, а управляющий вход инвертора подключен к выходу трехфазного формирователя сигнала на останов. На фиг. 1 представлена блок-схема устройства для управления вентильным электродвигателем; на фиг. 2 - пример выполнения, управляемого блока формирования сигналов правого и левого направлений вращения; на фиг. 3 - диаграммы напряжений в узлах блок-схемы устройства. Рассмотрим построение устройства для управления на примере вентильного электродвигателя, содержащего синхронную мащину 1 с трехсекционной якорной обмоткой 2 и индуктором 3, на валу 4 которого установлен датчик 5 положения индуктора с тремя выходными каналами 6-8 и преобразователь 9 частоты, к выходам 10-12 которого подключена трехсекционная якорная обмотка 2. Цепи управления ключами преобразователя 9 частоты подключены к выходу многоканального датчика 5 положения индуктора через управляемь1Й блок 13 фор-, мирования сигналов «Вперед правого и левого вращения, управляющий вход 14 которого связан с выходом логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 15, к первому входу 16 которой подключен переключатель 17 команд .«Вперед и «Назад, а к второму входу 18 подключен переключатель 19 команд «Пуск и «Стоп. Устройство содержит также датчик 20 Направления вращения, вход которого подключен к выходу многоканального датчика 5 положения индуктора, а выход 21 - к первому входу 22 трехвходового формирователя 23 сигнала на останов, второй вход 24 которого подключен к выходу первого управляемого инвертора, а третий вход 25 которого подключен к выходу логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ. 15, а третий вход 25 подключен к выходу переключателя команд «Пуск и «Стоп. Выход трехвходового формирователя 23 сигнала на останов связан с цепями управления .одной группы .(анодной или катодной) ключей преобразователя 9 частоты через второй управляющий вход блока 13. Кроме того, устройство содержит так же управляемый инвертор 26, информационный 27 и управляющий 28 входы которого подключены к выходу логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 15 и к выходу трехвходового формирователя 23 сигнала на останов соответственно, а выход подключен к управляющему входу 14 блока 13 формирования сигналов «В.перед и «Назад. Датчик 20 направления вращения содержит по числу каналов датчика 5 положения индуктора три D-триггера 29-31, выходы которых подключены к входам логического сумматора 32, выход которого является выходом 21 датчика 20 направления вращения. Трехвходовцж формирователь 23 сигнала на останов содержит логическую схему ИСКЛЮЧАЮЩЕЕ ИЛИ 33 и логические схемы НЕ 34 и И-НЕ 35. Выход логической . схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 33 и выход логической схемы НЕ 34 подключены каждый к соответствующему входу логической схемы И-НЕ 35, выход которой является выходом трехвходового формирователя 23. Устройство получает питание от источника 36 электрической энергии. Синхронная машина может быть любого типа, например с возбуждением от постоянных магнитов. Датчик 5 положения индуктора может быть любого типа, например ипдуктивный с подмагничиванием. В его каналах 6-8 формируются сигналы о положении индуктора 3 синхронной машины 1, смещенные в данном случае один относительно другого па . Длительность каждого сигнала соответствует угловому повороту ротора на JT . Для направления вращения вперед принята следующая последовательность сигналов: 6 - канал 7 - канал 8. Преобразователь О, частоты может быть любого тина, например двухполупериодный, выполненный на транзисторах. Такт коммутации для двухполупериодного преобразователя частоты составляет jiIZ. Управляемый блок 13 формирования сигналов правого и левого направления вращения может быть выполнен на базе различных логических схем, например на трех логических схемах ИСКЛЮЧАЮЩЕЕ ИЛИ 37 и формирователе 38 сигналов управления преобразователем частоты (фиг. 2). При наличии еди 1ичного входного сигнала на уцравляющем .входе 14 сигналы с каналов 6-8 датчика 5 положения индуктора проходят через управляемый блок 13 на цепи управления ключей преобразователя 9 частоты без измепения. При этом датчик 5 положения индуктора установлен в вентильно.м двигателе для обеспечения вращения вперед. При нулевом входном сигнале на управляющем входе 14 сигналы с каналов 6-8 датчика 5 инвертируются в управляемом блоке 13. Это эквивалентно сдвигу чувствительных элементов датчика 5 положения индуктора на , что обеспечивает реверс вентильного электродвигателя. Управляемый инвертор 26 выполнен, например, на логической схеме ИСКЛЮЧАЮЩЕЕ ИЛИ с прямым выходом. Работу устройства поясняют диаграммы напряжений, представленные на фиг. 3. Индексы при напряжениях на фиг. 3 совпадают с позициями блок-схе.мы на фиг. 1. При подключении устройства к источнику электрической энергии и задании направления вращения, нанример, вперед- посредством замыканияключа переключателя 17 команд (интервал времени ti. tj,) вентильный электродвигатель находится в состоянии покоя, поскольку трехвходовый формирователь 23 сигнала на останов, связанный с цепями управления одной группы, например анодной, ключей преобразовате тя 9 частоты вырабатывает сигнал логического нуля и поддерживает их в закрытом состоянии. Трехвходовый формирователь 23 может быть подключен к цепям управления одной группы .(анодной или катодной) ключей или непосредственно через развязывающие элементы, например диоды, или через управляе.мый блок 13. В это.м случае блок 13 выполняется по схеме, изображенной на фиг. 2, и работает в соответствии с законами цифровой логики. Формирование на выходе трехвходового формирователя 23 логического нуля обеспечивается за счет того, что при подключении к источнику 36 электрической энергии Dтриггеры 29-31 датчика 20 направления вращения устанавливаются в нулевое положение, при этом иа ьыходе логического сумматора 32 тоже присутствует логический ноль. На входах 22-25 трехвходового формирователя 23 сигналы также отсутствуют. При нодаче команды «Пуск путем замьь ка1П1Я ключа переключателя 19 команд в момент времени tg на входах 24 и 25 и на выходе трехвходового формирователя 23 появляются единичные управляющие сигналы, уп равляемый блок 13 формирует сигналы для вращения вперед, поскольку на его управляющем входе 14 присутствует единичный сигнал, поступаюп1ий с выхода второго управляемого инвертора 26. Вентильный электродвигатель начинает вращаться вперед и работает в этом режиме на интервале вре.мени c-tg до tj. На выходах D-триггеров 29-31 периодически формируются единичные сигналы, поскольку в каждо.м D-триггере на тактируемый о.ход управляющий импульс с 7-6 датчика положения индуктора поступает в тот момент, когда иа его информационном входе уже имеет место управляющий сигнал с соответствуюн1его канала. Логический сумматор 32 су.м.мирует единичные сигналы с выходов триггеров 29- 31. Он может бытьвыполнеп па логической схеме ИЛИ. Единичный сигнал иа выходе каждого D-триггера исчезает в .момент появления на его входе «Установка нуля управляющего сигнала соответствующего канала 7-6. При направлении вращения назад на вход «Установка нуля каждого триггера 29-31 сигнал 11риходит раньи е, чем на тактируемый вход, поэтому на выходе, триггеров и на выходе сумматора 32 сигналы Ьтсутстпуют. В момент времени ts подается команда на вращение назад посредством размыкания
ключа переключателя 17 команд, что приводит к исчезновению единичных сигналов на входе 16, выходе логической схемы 15 и на управляющем, входе 14. Управляемый блок 13 формирует сигналы для вращения назад. Вентильный электродвигатель переводится в режим противовключения и, продолжая вращйться .вперед,, эффективно тормозится на интервале времени с 15До . В момент времени вентильный электродвигатель останавливается и начинает вращаться в противоположную сторону (назад) интервал времени с t/, до te). В момент времени tj датчик 20 направления вращения фиксирует изменение направления вращения вентильного электродвигателя и .па его выходе 21 {на выходе логического сумматора 32) появляется нулевой сигнал. На выходе D-триггеров 29-31 отсутствуют сигналы, поскольку в каждом D-триггере на тактируемый вход управляющий импульс поступает в тот. момент, когда па его ин, формационный вход управляюплий сигнал еще ие поступил, а па входе «Установка нуля имеет место логической единицы.
Переключение датчика 20 в момент времеии ts не приводит к срабатыванию трехвхо.аового формирователя 23 сигнала на останов, так как на его входе 25 имеет место сигнал логической единипьс, соответствую-. и;ий команде «Пуск.
В момент времени tj в устройство посредством размыкания ключа переключателя 19 команд подается команда «Стоп, что приводит К исчезновению единичного сигнала йа выходе переключателя 19 команд «Пуск и «Стопя. Управляемый блок 13 формирует сигналы для вращения вперед, поскольку на его управляющем входе 14 появляется единичный, сигнал. Вентильный электродвигатель переводится в режим противов слючеиия
и, продолжая вращаться назад, эффективно тормозится на интервале времени с tg до tr. В момент времени tr вентильный электродвигатель останавливается н начинает движение в противоположную сторону 5 (вперед). В момеит времени ig датчик 20 направления вращения фиксирует изменение направления вращения вентильного электродвигателя и на его выходе51 появляется единичный сигнал. Этот сигнал форми0 руег D-триггер 31 на своем выходе. При этом на входах 22 и 24 трехвходового формирователя 23 сигнала на останов имеют место единичные сигналы, а на входе 25 и на выходе - нулевые сигналы.
После формирования на выходе трех5входового формирователя 23 сигнала на останов нулевого уровня в управляемом ин верторе 26 происходитинвертирование , задающего направление вращения и отключение одной группы, например анод0 пой, ключей преобразователя 9 частоты.Таким ,обр,азом вентильный электродвигатель перевод№ся. в противрвключения с огключе-1пюй одной-Труппой ключей преобразователя9. частоть, соответствует ре5. жимудинамического: торможения.
При останове вентильного электродвигателя, вращающегося вперед, процессы в предлагаемо.м устройстве п ютека1от аналогичрюПовышение точности и умепьщепие времени останова , обеспечиваются за счет иссключения из алгоритма торможения вентильного .электродвигателя режима торможения под действием нагрузки (выбега) н обеспечения останова путем комбинации активных , тормозных режимов протпвовключепия н ди5, намического торможения.
Предлагаемое устройство позволяет повысить точность, умепьщить время и путь остаиова.
и.
Г6
и
и.
и.
1 Г-I
Uc
о 3f гл
и
J/
и
30
и
29
% 15)27-24
и
33
и
J4
и
23,28
а
гв,г4
uff
tot
a)t
6}f
6jf
r ш1
ut
u}f
Г 6jt
u}t
fi)t
6)t
&)t
&it
t
i.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1095321A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1277342A2 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1164849A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1135002A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Вентильный электропривод | 1985 |
|
SU1317630A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ по авт. св. № 1029368, отличающееся тем, что, с целью повышения точности rt уменьшения времени останова, в него введен управляемый инвертор с информационным и управляющим входами, включенный по информационному входу и выходу меж-. ду выходом первой логической схемы ИСК.ЛЮЧАЮЩЕЕ ИЛИ и управляющим входом блока формирования сигналов правого и левого направлений вращения соответственно, а управляющий вход инвертора подключен к выходу трехфазного формирователя сигнала на останов. сл О5 о ьо СП СП 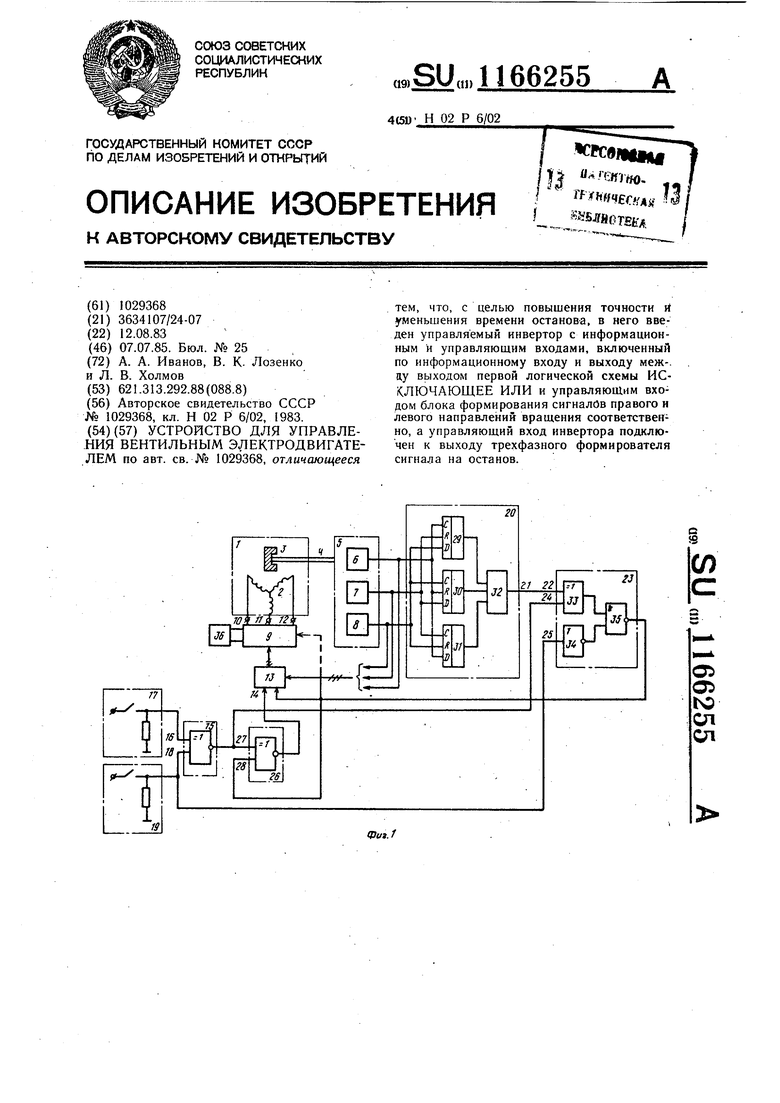
t,t.
j t ts
t,t
71-8
Фиг. J
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
