Предлагается индукционный прецизионный датчик, в котором цсключены влияния нерабочих .перемещений ротора и уменьшены реактивные моменты датчика, свойственные известным индукционным датчикам. Магнитная цепь датчика выполнена в виде двух нараллельно расположенных П-образных пакетов статора и ротора, перемещающегося внутри прорезей статора.
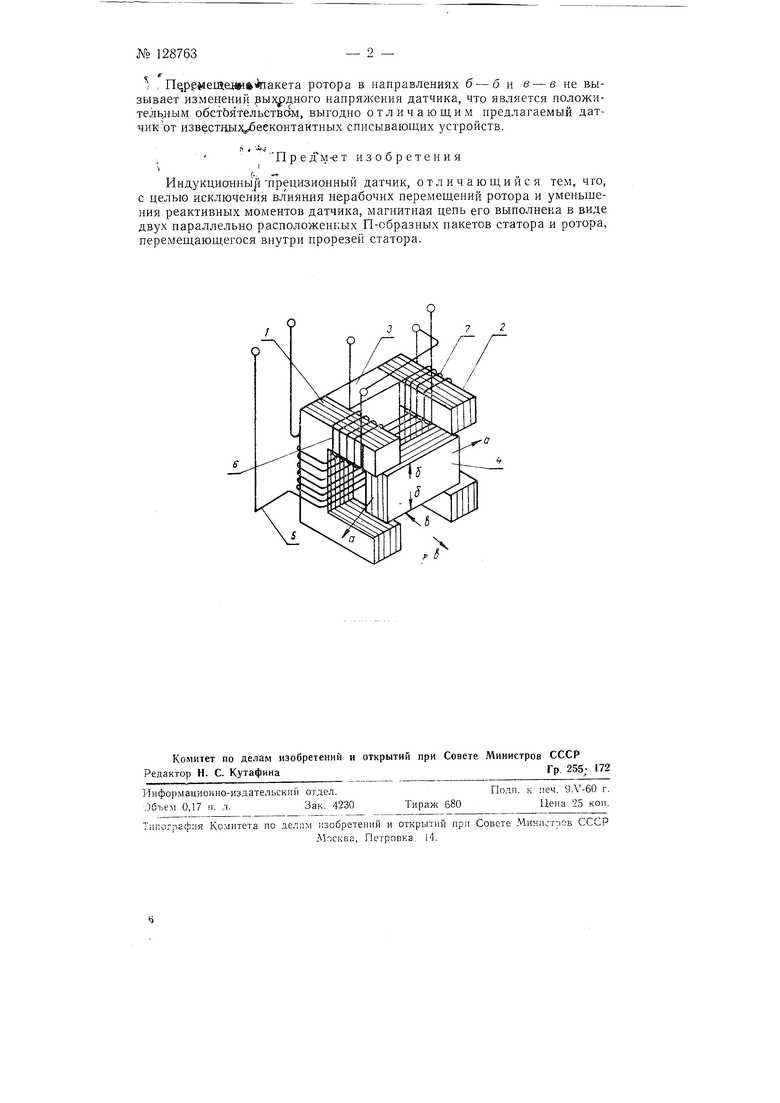
Датчик содержит два параллельно расположенных П-образных пакета /, 2 статора (см.чертеж), набранных из листов электротехнической стали и укрепленных неподвижно на основании 3. Внутри прорезей П-образных пакетов размещен ротор 4, также набранный в виде пакета из листов электротехпической стали. Длипа пакета ротора выбрана такой, чтобы в пределах рабочего перемещения его края не выходили из прорезей обоих П-образных пакетов статора. Цифрой 5 обозначена обмотка возбуждения датчика, охватывающая одновременно оба пакета статора. Катущки вторичной (выходной) цепи датчика, имеющие одинаковые параметры, каждая из которых охватывает по одному сердечнику П-образных пакетов статора, и соединенные встречно, обозначены цифрами .
При перемещении пакета ротора 4 внутри прорезей П-образных пакетов /, 2 статора в направлении а-а происходит п:ерераспределение Э.Д.С., индуктируемых в выходных катущках 6, 7 и в выходной цепи создается напряжение, амплитуда которого пропорциональна величине перемещения в направлении а-а от нулевого положения, а фаза при переходе через нулевое положение меняется на 180°. Перемещение в направлении а - а является рабочим перемещением, которое записывается в виде напряжения переменного тока.
, П реяеЩеддаа пакета ротора в направлениях б - б и в - е не вызывает изменений эы)фдного напряжения датчика, что является положительным обстЬятельствйм, выгодно отличающим предлагаемый датчик Ът известных ееконтантных списывающих устройств.
Предм-ет изобретения
Индукционнь1|1 прецизионный датчик, отличающийся тем, что, с целью исключения влияния нерабочих перемещений ротора и уменьшения реактивных моментов датчика, магнитная цепь его выполнена в виде двух параллельно расположенных П-образных пакетов статора и ротора, перемещающегося внутри прорезей статора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое решающее устройство | 1958 |
|
SU114699A1 |
| Прибор для контроля роторных секций обмоток микромашин | 1959 |
|
SU140892A1 |
| Преобразователь угла поворота вала в код | 1960 |
|
SU135286A1 |
| Прибор для измерения магнитной асимметрии поверхностей статора и ротора электрических машин | 1960 |
|
SU132321A1 |
| Устройство для проверки вращающихся трансформаторов (ВТ) по эталонным | 1959 |
|
SU131140A1 |
| УСТРОЙСТВО для ЗАДАНИЯ ЭТАЛОННЫХ УГЛОВЫХ ПРОМЕЖУТКОВ | 1973 |
|
SU381089A1 |
| Двухотсчетный вращающийся трансформатор | 1974 |
|
SU535674A1 |
| Способ настройки двухканальных систем передачи угла | 1974 |
|
SU610147A1 |
| Индукторный генератор переменного тока | 1958 |
|
SU119201A1 |
| СПОСОБ НАСТРОЙКИ И РЕГУЛИРОВКИ СЧЕТНО-РЕШАЮЩИХУСТРОЙСТВ | 1966 |
|
SU183254A1 |
