1
Изобретение относится к способам юстировки устройств, предназначенных для диагностики плазмы и электронных пучков с помощью рассеяния лазерного излучения.
Цель изобретения - повьшение точности юстировки при упрощении реализации способа.
На фиг. 1 схематически представлено устройство для лазерной диагностики, которое нужно юстировать (устройство содержит зондирующий лазер с объективом ввода излучения 1, камеру 2, предназначенную для диагностики плазмы, приемную систему 3) на фиг. 2 - зависимость величины релеевского рассеяния от смещения приемного злемента перпендикулярно осям зондирующего излучения и наблюдения; на фиг. 3 - зависимость величины релеевского рассеяния от смещения приемного элемента вдоль оси лазера.
Способ юстировки устройств лазерной диагностики осуществляют следующим образом.
Излучение зондирующего лазера 1 фокусируют в камеру 2, предназначенную для лазерной диагностики. Регисрируют приемным злементом 3 релеев- ское рассеяние из камеры. Перемещаю приемный элемент 3 относительно камеры 2 по трем взаимно независимым направлениям, не лежащим в одной плоскости. Такими направлениями могут быть, например, следующие: вдол оси лазерного излучения, поперек оси лазерного излучения, вдоль.оси наблюдения. При перемещении регистрируют величину релеевского рассеяния и соответствующее взаимное расположение камеры и элементов (элемета) приемной системы. Направление премещения выбирают в сторону возрас
менно с этим регистрировайпи величин релеевского рассеяния (фиг. 3). Отм тили положение У , в котором велич на релеевского рассеяния имела макс мальное значение 1. Перемещали приемный элемент 3 вдоль- оси X через точку (Уд , ZoO, отмечали величи ну релеевского рассеяния. Практичес
тания величины релеевского рассеяния. 45 и при перемещении вдоль оси X в еОтыскивают расположение приемного злемента относительно камеры, при котором величина релеевского рассеяния имеет максимальное значение. Это по-
ложение соответствует совмещению об- 50 размеры области, зондируемой лазеласти наблюдения с фокусом зондирующего излучения.
Пример реализации способа юстировки устройства лазерной диагностики.
Для юстировки устройства использовался тот же лазер 1, та же камера 2 и та же приемная система 3,котоO
О
0
5
рые использовались в дальнейшем для целей диагностики.
Юстировку осуществляли следующим образом.
Фокусировали излучение лазера 1 в определенную точку внутри камеры 2. Юстировочные элементы устройства обеспечивали перемещения приемного элемента 3 системы в таких трех направлениях: вдоль оси наблюдения приемного элемента (направление X), составляющей угол 120° с направлением оси зондирующего излучения; вдоль оси зондирующего излучения (на правление У); перпендикулярно осям зондирующего излучения и наблюдения (направление Z). Осуп1ествляли предварительную юстировку устройства, для чего перемещали приемный элемент 3 так, чтобы область наблюдения приемной, системы совпадала с предполагаемым местом нахождения фокуса лаз-ера 1 в камере 2. Регистрировали приемным элементок 3 релеевское рассеяние 1 из камеры 2 при давлении азота 500 мм рт/ст. Перемещали приемный элемент 3 вдоль оси Z, одновременно регистрировали величину релеевского рассеяния 1 (фиг. 2). Отметили положение (Z) приемного элемента, при котором I имела максимальное значение
тЭто положение соответствовало
пересечению области наблюдения с осью зондирующего излучения. Перемещали приемньй элемент 3 в направлении У , проходящем через точку Z „, одновре
менно с этим регистрировайпи величину релеевского рассеяния (фиг. 3). Отметили положение У , в котором величина релеевского рассеяния имела максимальное значение 1. Перемещали приемный элемент 3 вдоль- оси X через точку (Уд , ZoO, отмечали величину релеевского рассеяния. Практичес и при перемещении вдоль оси X в еличина релеевского рассеяния оставалась неизменной, поскольку глубина резкости использованной приемной системы существенно превосходила
ром 1, в этом направлении. Помещали приемный элемент 3 в положение Х, Уд 5 Zg. При этом XQ соответствовало э-наченивд X при предварительной юстировке. В этом положении приемный элемент 3 зарегистрировал максимальное значение величины релеевского сигнала из камеры 2 при направлении
оси приемного элемента, определяемой особенностями устройства. Это означало, что наблюдаемьш объем совпал с областью фокального пятна лазера 1.
Формула изобретения
Способ юстировки устройств лазерной диагностики, основанный на совмещении в камере объема, наблюдаемого приемным элементом, с объемом
зондирующим лазерным излучением,о т- личающийся тем, что, с целью повышения точности при упрощении реализации, регистрируют ре- леевское рассеяние зондирующего излучения из камеры, а совмещение производят путем перемещения приемного элемента относительно камеры по трем независимым направлениям, не лежащим в одной плоскости, до получения максимальной величины релеевского рассеяния.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| Комбинированный лидар | 2020 |
|
RU2738588C1 |
| СПОСОБ СБОРКИ РЕНТГЕНОВСКОЙ ОПТИЧЕСКОЙ СИСТЕМЫ, СОДЕРЖАЩЕЙ N ЗЕРКАЛЬНЫХ МОДУЛЕЙ | 2016 |
|
RU2629693C1 |
| ЛАЗЕРНЫЙ КОНФОКАЛЬНЫЙ ДВУХВОЛНОВЫЙ РЕТИНОТОМОГРАФ С ДЕВИАЦИЕЙ ЧАСТОТЫ | 2007 |
|
RU2328208C1 |
| СПОСОБ ОЦЕНКИ ВИБРАЦИОННЫХ ИЛИ АКУСТИЧЕСКИХ СИГНАЛОВ ВДОЛЬ ПРОТЯЖЕННЫХ ОБЪЕКТОВ НА БАЗЕ ВОЛОКОННО-ОПТИЧЕСКОГО КОГЕРЕНТНОГО РЕФЛЕКТОМЕТРА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2624594C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2384810C2 |
| Лазерный доплеровский измеритель скорости | 1990 |
|
SU1748071A1 |
| СПОСОБ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ | 2005 |
|
RU2303393C1 |
| Устройство для определения пространственного распределения концентрации капель в факеле распыла форсунки | 2016 |
|
RU2633648C1 |
| Способ измерения плотности электронов в пучке | 1981 |
|
SU987864A1 |
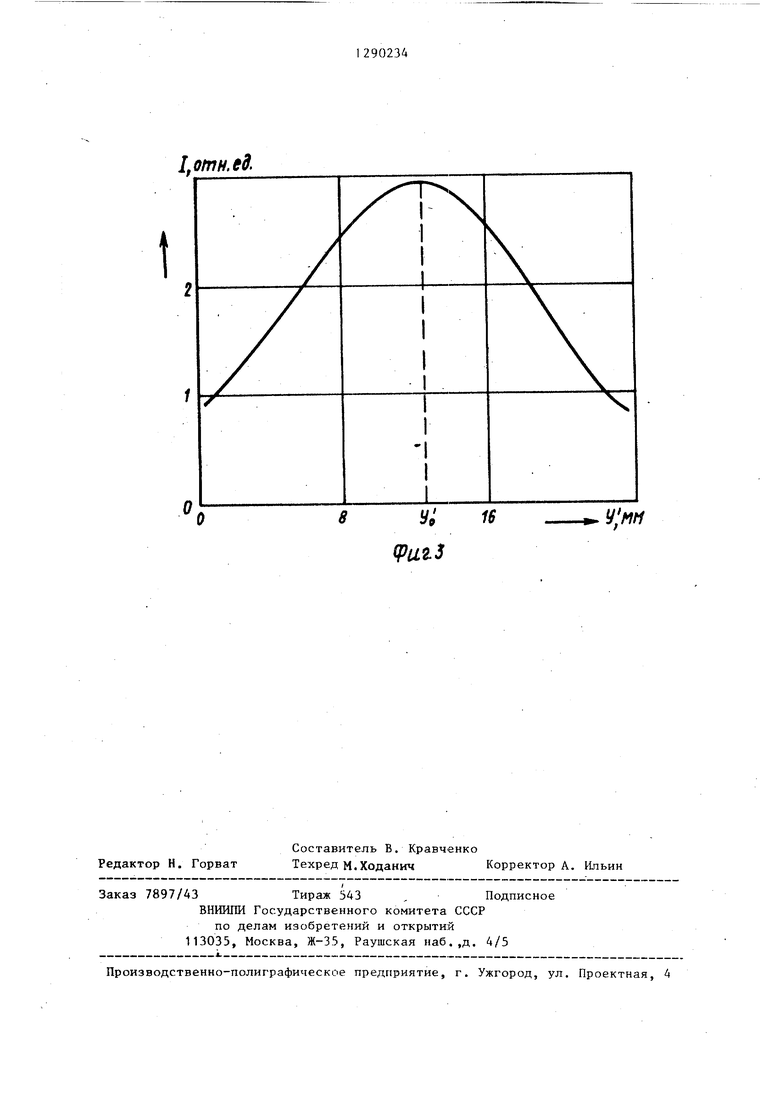
Изобретение может быть использовано для диагностики плазмы и электронных пучков с помощью рассеяния лазерного излучения. Целью изобретения является повышение точности юстировки при одновременном упрощении реализации способа. Способ юстировки основан на совмещении в камере 2 наблюдаемого приемным элементом 3 объема с объемом, зондируемым лазерным излучением. Приемным элементом 3 регистрируют релеевское рассеяние сфокусированного излучения зондирующего лазера 1 из камеры 2 и перемещают приемный элемент 3 относительно камеры 2 по трем независимым на- ,правлениям, не лежащим в одной .плоскости, до получения максимальной величины релеевского рассеяния. Это положение его соответствует совмещению области наблюдения с фокусом зондирующего излучения, 3 ил. i СЛ ND О у ГО СО (ffUB.1
/, отн.ед.
1,МН
l,ofnH.ed.
8 у; 16
агЗ
Редактор Н. Горват
Составитель В. Кравченко
Техред м.Ходанич Корректор А. Ильин
Заказ 7897/43Тираж 543 , Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
у; МП
| Phys | |||
| Raw | |||
| Lett., v | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
| Пятницкий Л.H | |||
| Лазерная диагностика плазмы | |||
| М.: Атомиздат, 1976, с | |||
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
