Изобретение относится к телеграфии и может быть использовано в телеграфных аппаратах.
Цель изобретения - повышение до- стовернос-ти приема информации при мешающих механических воздействиях.
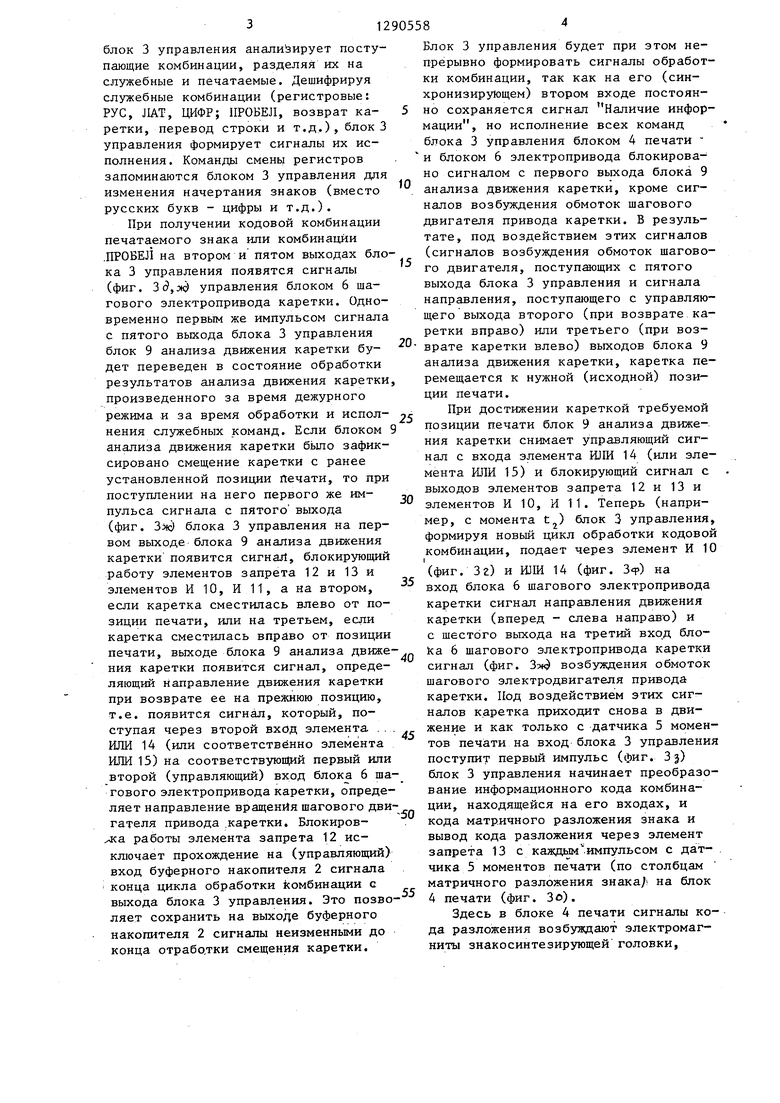
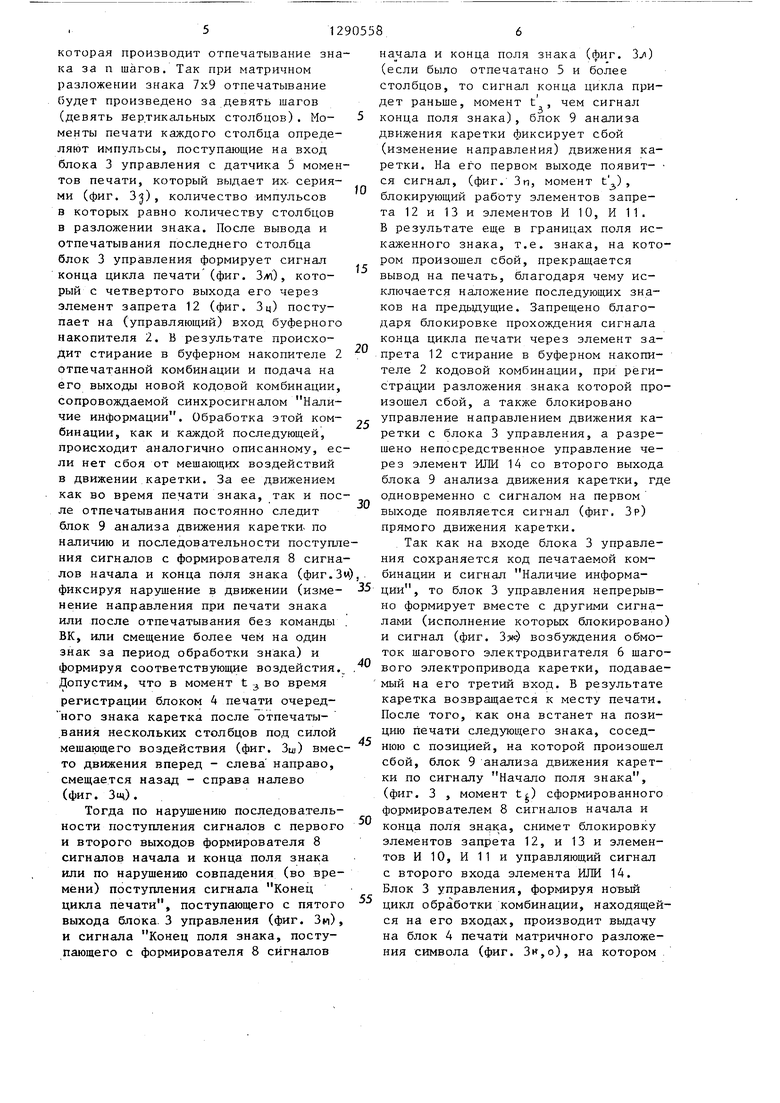
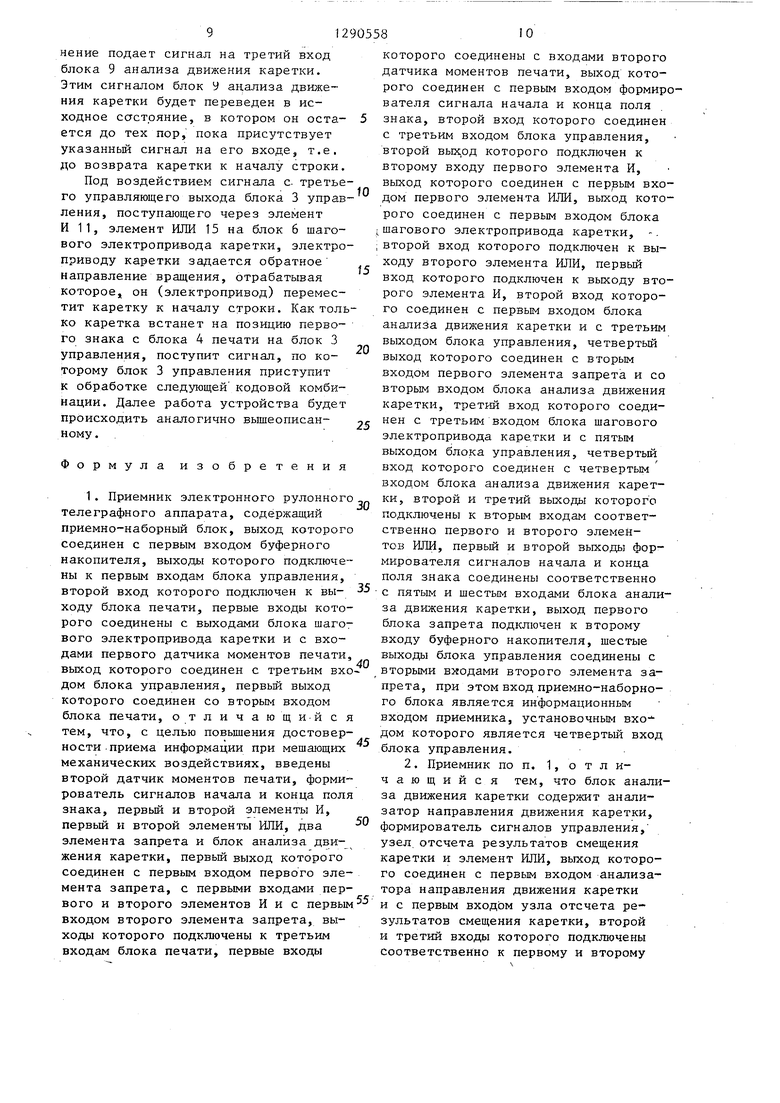
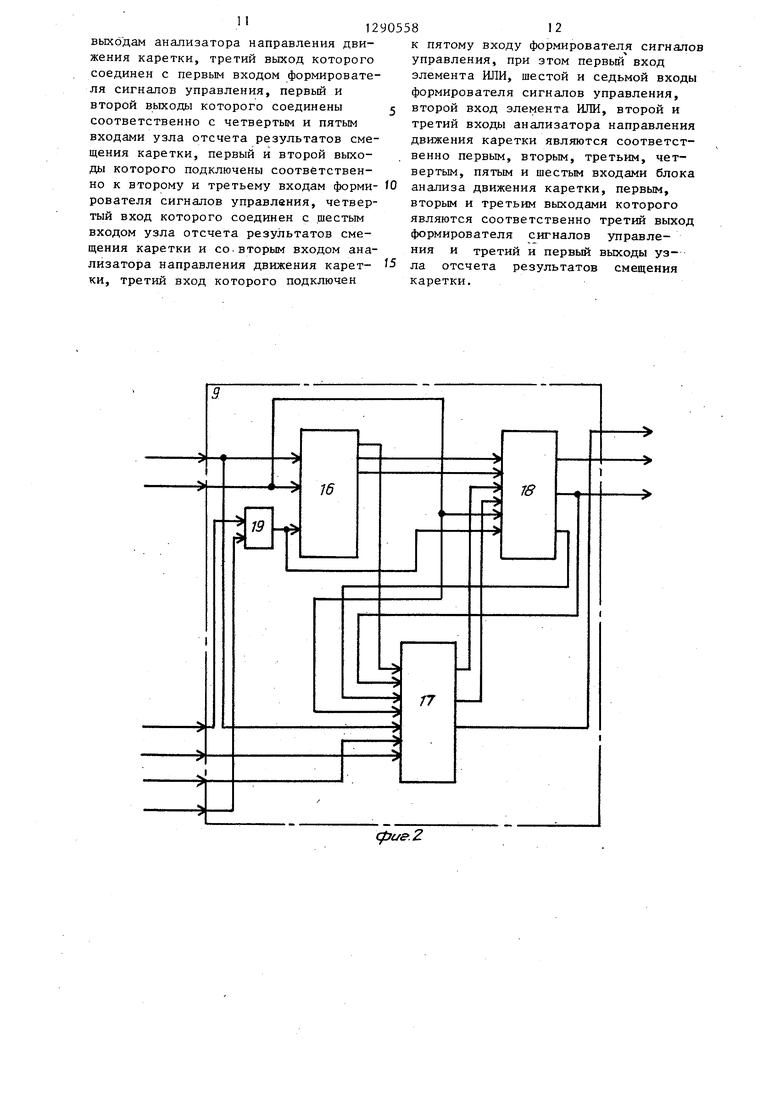
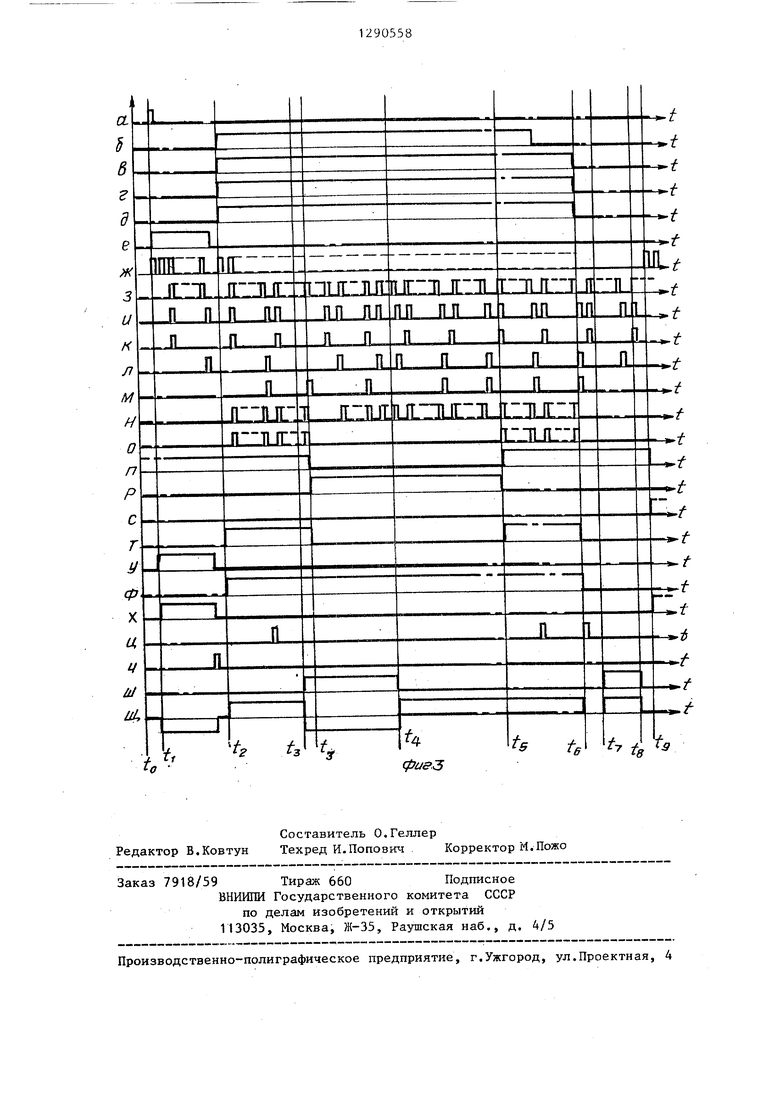
На фиг. 1 изображена структурная электрическая схема предлагаемого приемника; на фиг. 2 - структурная электрическая схема блока анализа движения каретки; на фиг. 3 - временая диаграмма работы приемника.
на второй управляющий вход блока 6 шагового электропривода каретки, определяя обратное (фиг, Зщ) направление вращения шагового двигателя привода каретки. Сигнал с пятого выхо да, представляющий собой последовательность импульсов (фиг, ), посту пает на третий вход блока 6 шагового электропривода каретки и возбуждает обмотки указанного двигателя. В результате, каретка движется к началу строки. После установки каретки на первую позицию с выхода блока 4 печа
Приемник электронного рулонного телеграфного аппарата содержит прием- j ° управления поступает но-наборный блок 1, буферный накопи- сигнал (фиг, 3v), по которому блок 3 тель 2, блок 3 управления, блок 4
управления прекращает формирование сигналов управления до приема информации, после чего за местоположением каретки блока 4 печати следит блок 9 анализа движения каретки, анализируя наличие и последовательность поступления на него сигналов с выходов формирователя 8 сигналов начала (фиг. Зк) и конца (фиг. 3л) поля знака.
печати, первый датчик 5 моментов печати, блок 6 шагового электропривода каретки, второй датчик 7 моментов печати, формирователь 8 сигналов начала и конца поля знака, блок 9 анализа движения каретки, первый и второй элементы И 10 и 11, первый и второй элементы запрета 12 и 13, первый и второй элементы ИЛИ 14 и 15,
Блок 9 анализа движения каретки содержит анализатор 16 направления движения каретки, формирователь 17 сигналов управления, узел 18 отсчета результатов смещения каретки, элемент ИЛИ 19.
Приемник работает следующим образом.
При включении приемника на вход начальной установки подается сигнал (фиг. 3ci), который устанавливает блок 3 управления и блок 9 анализа движения каретки в исходное состояние. При этом с первого выхода блока 9 анализа движения каретки на первые входы элементов запрета 12 и 13 на первые входы элементов. И 10, И 11 поступает разрешающий сигнал (фиг. Зп), На втором и третьем выходах блока 9 анализа и движения каретки сигналы управления отсутствуют (фиг. ЗР,С).
Блок 3 управления по сигналу начальной установки производит установку каретки (не показана) н.а позицию печати первого знака. Для этого блок управления формирует и вьщает через Свои третий и пятый выходы соответстИз буферного накопителя 2 кодовая комбинация параллельным кодом подается (фиг. 36) на сигнальные входы блока 3 управления. Вместе с этим с (управляющего) выхода буферного накопителя 2 подается синхросигнал
вующие сигналы. Сигнал с третьего вы-хода (фиг. Зе) является сигналом об- (фиг. Зг) Наличие информации, коратного направления движения каретки.
Он через элемент И 11 (фиг. 3 у) и
элемент ИЛИ 15 (фиг. Зх) поступает
торый переводит блок 3 управления в режим обработки находящейся на ег входах кодовой комбинации. При этом
на второй управляющий вход блока 6 шагового электропривода каретки, определяя обратное (фиг, Зщ) направление вращения шагового двигателя привода каретки. Сигнал с пятого выхода, представляющий собой последовательность импульсов (фиг, ), поступает на третий вход блока 6 шагового, электропривода каретки и возбуждает обмотки указанного двигателя. В результате, каретка движется к началу строки. После установки каретки на первую позицию с выхода блока 4 печа ° управления поступает сигнал (фиг, 3v), по которому блок 3
° управления поступает сигнал (фиг, 3v), по которому блок 3
управления прекращает формирование сигналов управления до приема информации, после чего за местоположением каретки блока 4 печати следит блок 9 анализа движения каретки, анализируя наличие и последовательность поступления на него сигналов с выходов формирователя 8 сигналов начала (фиг. Зк) и конца (фиг. 3л) поля знака.
При появлении информации в канале связи (фиг. 3S), она поступает на вход приемно-наборного блока 1, который производит регистрацию принимаемых кодовых комбинаций и их преобразование из последовательного вида в параллельный. Параллельным кодом информация записывается в буферный накопитель 2, который обеспечивает хранение принятых комбинаций до окончания их обработки блоком 3 управления и регистрации их блоком 4 печати. При этом емкость буферного накопителя 2 определяется максимальным временем задержки обработки комбинации, которое обусловливается временем, необходимым на продвижение каретки от одного конца строки до другого при обработке смещения с последующим возвратом каретки. Исходя из этого условия, в предлагаемом приемнике емкость буферного накопителя 2 должна составлять не менее 30 знаков.
Из буферного накопителя 2 кодовая комбинация параллельным кодом подается (фиг. 36) на сигнальные входы блока 3 управления. Вместе с этим с (управляющего) выхода буферного накопителя 2 подается синхросигнал
торый переводит блок 3 управления в режим обработки находящейся на его входах кодовой комбинации. При этом
10
15
20
блок 3 управления анализирует поступающие комбинации, разделяя их на служебные и печатаемые. Дешифрируя служебные комбинации (регистровые: РУС, JIAT, ЦИФР; ПРОБЕЛ, возврат каретки, перевод строки и т.д.), блок 3 управления формирует сигналы их исполнения. Команды смены регистров запоминаются блоком 3 управления для изменения начертания знаков (вместо русских букв - цифры и т.д.).
При получении кодовой комбинации печатаемого знака или комбинации nPOBEJi на втором и пятом выходах блока 3 управления появятся сигналы (фиг. Зд,ок) управления блоком 6 шагового электропривода каретки. Одновременно первым же импульсом сигнала с пятого выхода блока 3 управления блок 9 анализа движения каретки будет переведен в состояние обработки результатов анализа движения каретки, произведенного за время дежурного режима и за время обработки и испол- ys нения служебных команд. Если блоком 9 анализа движения каретки бьшо зафиксировано смещение каретки с ранее установленной позиции печати, то при поступлении на него первого же импульса сигнала с пятого выхода (фиг. Зз(с) блока 3 управления на первом выходе блока 9 анализа движения каретки появится сигнал, блокирующий работу элементов запрета 12 и 13 и элементов И 10, И 11, а на втором, если каретка сместилась влево от позиции печати, или на третьем, если каретка сместилась вправо от позиции печати, выходе блока 9 анализа движения каретки появится сигнал, определяющий направление движения каретки при возврате ее на прежнюю позицию, т.е. появится сигнал, который, поступая через второй вход элемента ... ИЛИ 14 (или соответственно элемента ИЛИ 15) на соответствуюШ(ий первый или второй (управляющий) вход блока 6 шагового электропривода каретки, определяет направление вращения шагового двигателя привода .каретки. Блокиров- са работы элемента запрета 12 исключает прохождение на (управляющий) вход буферного накопителя 2 сигнала конца цикла обработки комбинащии с выхода блока 3 управления. Это позво ляет сохранить на выходе буферного накопителя 2 сигналы неизменными до конца отрабо,тки смещения каретки.
30
35
40
45
-50
.-55
10
15
20.
, ys 9 .
905584
Блок 3 управления будет при этом непрерывно формировать сигналы обработки комбинации, так как на его (син- хронизируйщем) втором входе постоянно сохраняется сигнал Наличие информации, но исполнение всех команд блока 3 управления блоком 4 печати и блоком 6 электропривода блокировано сигналом с первого выхода блока 9 анализа движения каретки, кроме сигналов возбуждения обмоток шагового двигателя привода каретки. В результате, под воздействием этих сигналов (сигналов возбуждения обмоток шагового двигателя, поступающих с пятого выхода блока 3 управления и сигнала направления, поступающего с управляющего выхода второго (при возврате каретки вправо) или третьего (при возврате каретки влево) выходов блока 9 анализа движения каретки, каретка перемещается к нужной (исходной) позиции печати.
При достижении кареткой требуемой позиции печати блок 9 анализа движения каретки снимает управляющий сигнал с входа элемента ИЛИ 14 (или элемента ИЛИ 15) и блокирующий сигнал с выходов элементов запрета 12 и 13 и элементов И 10, И 11. Теперь (напри30
мер, с момента
Ч)
35
40
45
-50
55
блок 3 управления, формируя новый цикл обработки кодовой
комбинации, подает через элемент И 10
I
(фиг. Зг) и или 14 (фиг. ) на вход блока 6 шагового электропривода каретки сигнал направления движения каретки (вперед - слева направо) и с шестого выхода на третий вход бло- ka 6 шагового электропривода каретки сигнал (фиг. Зэ« возбуждения обмоток шагового электродвигателя привода каретки. Под воздействием этих сигналов каретка приходит снова в движение и как только с датчика 5 моментов печати на вход блока 3 управления поступит первый импульс (фиг. 3j) блок 3 управления начинает преобразование информационного кода комбинации, находящейся на его входах, и кода матричного разложения знака и вывод кода разложения через элемент запрета 13 с каждым импульсом с дат- . чика 5 моментов печати (по столбцам матричного разложения знака) на блок 4 печати (фиг. Зо).
Здесь в блоке 4 печати сигналы кода разложения возбуждают электромагниты знакосинтезирующей головки.
которая производит отпечатывание знака за п шагов. Так при матричном разложении знака 7x9 отпечатывание будет произведено за девять шагов (девять вертикальных столбцов), Моменты печати каждого столбца определяют импульсы, поступающие на вход блока 3 управления с датчика 5 моментов печати, который выдает их- сериями (фиг. 3), количество импульсов в которых равно количеству столбцов в разложении знака. После вывода и отпечатывания последнего столбца блок 3 управления формирует сигнал конца цикла печати (фиг. ЗМ), который с четвертого выхода его через элемент запрета 12 (фиг. 3ц) поступает на (управляющий) вход буферного накопителя 2. В результате происходит стирание в буферном накопителе 2 отпечатанной комбинации и подача на его выходы новой кодовой комбинации, Сопровождаемой синхросигналом Наличие информации. Обработка этой комбинации, как и каждой последующей, происходит аналогично описанному, если нет сбоя от мешающих воздействий в движении каретки. За ее движением как во время печати знака, так и после отпечатывания постоянно следит блок 9 анализа движения каретки- по наличию и последовательности поступлния сигналов с формирователя 8 сигналов начала и конца поля знака (фиг,3 фиксируя нарушение в движении (изме- нение направления при печати знака или после отпечатывания без команды ВК, или смещение более чем на один знак за период обработки знака) и формируя соответствующие воздейстия. Допустим, что в момент t - во время
регистрации блоком 4 печати очеред- ного знака каретка после отпечатывания нескольких столбцов под силой мешающего воздействия (фиг. Зш) вместо движения вперед - слева направо, смещается назад - справа налево (фиг. 3ч),
Тогда по нарушению последовательности поступления сигналов с первого и второго выходов формирователя 8 сигналов начала и конца поля знака или по нарушению совпадения (во времени) поступления сигнала Конец цикла печати, поступающего с пятого выхода блока. 3 управления (фиг. 3м), и сигнала Конец поля знака, поступающего с формирователя 8 сигналов
0
5
0
5
0
40
45
50
55
начала и конца поля знака (фиг. 3-л) (если было отпечатано 5 и более столбцов, то сигнал конца цикла придет раньше, момент t чем сигнал конца поля знака), блок 9 анализа движения каретки фиксирует сбой (изменение направления) движения каретки. На его первом выходе появит- ся сигнал, (фиг, Зп, момент t ,) , блокирующий работу элементов запрета 12 и 13 и элементов И 10, И 11. В результате еще в границах поля искаженного знака, т.е, знака, на котором произошел сбой, прекращается вывод на печать, благодаря чему исключается наложение последующих знаков на предьздущие. Запрещено благодаря блокировке прохождения сигнала конца цикла печати через элемент запрета 12 стирание в буферном накопителе 2 кодовой комбинации, при рёги- стращ1и разложения знака которой произошел сбой, а также блокировано управление направлением движения каретки с блока 3 управления, а разрешено непосредственное управление через элемент ИЛИ 14 со второго выхода блока 9 анализа движения каретки, где одновременно с сигналом на первом выходе появляется сигнал (фиг, ЗР) прямого движения каретки.
Так как на входе блока 3 управления сохраняется код печатаемой комбинации и сигнал Наличие информации, то блок 3 управления непрерывно формирует вместе с другими сигналами (исполнение которых блокировано) и сигнал (фиг. Ззв;) возбуждения обмоток шагового электродвигателя 6 шагового электропривода каретки, подаваемый на его третий вход. В результате каретка возвращается к месту печати. После того, как она встанет на позицию печати следующего знака, соседнюю с позицией, на которой произошел сбой, блок 9 анализа движения каретки по сигналу Начало поля знака, (фиг. 3 , момент tp сформированного формирователем 8 сигналов начала и конца поля знака, снимет блокировку элементов запрета 12, и 13 и элементов И 10, И 11 и управляющий сигнал с второго входа элемента ИЛИ 14. Блок 3 управления, формируя новьй цикл обработки комбинации, находящейся на его входах, производит выдачу на блок 4 печати матричного разложения символа (фиг. Зк,о), на котором
произошел сбой, за счет чего восстанавливается искаженный знак. По сиг- налу Конец цикла печати кодовая комбинация восстановленного символа стирается в буферном накопителе 2 и на сигнальные входы блока 3 управления подается кодовая комбинация следующего символа, обработка которой производится вышеописанным способом.
Если же при регистрации знака происходит сбой в движении каретки, в результате которого она продвинется на несколько позиций вперед (вправо), то искажения регистрируемого символа не происходит, так как датчик 5 моментов печати все сигналы моментов печати вьщает хотя и ускоренно, но равномерно после поворота оси приво- да на заданньш угол, т.е. расстояние между столбцами мозаичного разложения символа будет выдержано. Ускорение же движения каретки от мешающего воздействия в пределах поля одного зна- ка мало даже по сравнению с быстродействием знакосинтезирующей головки, обеспечивающей печать не менее Зи зн/с, поэтому регистрация этого символа и стирание его комбинации в буферном накопителе 2. в данном случае не блокируется. После его обработки по сигналу Конец цикла печати на вход блока 3 управления подается код нового знака, но обработка его будет уже блокирована. Блок 9 анализа движения каретки сразу после получения сигнала Конец цикла печати зафиксирует, что каретка продолжает движение без сигналов возбуждения с блока 3 управления, т.е. он фиксирует сбой в движении каретки и блокирует работу элементов запрета 12 и 13 и элемен- трв И 10, И 11, что предотвращает искажение регистрации следующих сим
волов из-за возрастания скорости движения каретки под воздействием возмущающего фактора. Блокировка работы элементов запрета 12 и 13 и элементов И 10, И 11 продолжается до возврата каретки на нужную позицию печати под воздействием сигнала обратного (справа налево) движения каретки, поступающего с третьего выхода блока 9 анализа движения каретки через второй вход элемента ИЛИ 15 на второй вход блока 6 шагового электропривода каретки, и сигнала возбуждения обмоток двигателя привода каретки, поступающего
r п 5
5
0
5
0
5
на третий вход блока 6 шагового электропривода каретки с пятого выхода блока 3. управления.
По сигналам, поступающим с формирователя 8 сигналов начала и конца поля знака В, блок 9 анализа движения каретки следит за возвратом каретки. Как только ока станет на начало поля разложения знака, среднего с последним отпечатанным, блок 9 анализа движения каретки снимает с элементов запрета 12 и 13 и элементов И 10, И 11 блокирующий и со второго входа элемента ИЛИ 15 управляющий сигналы. После этого блок 3 управления приступает к обработке комбинации, находящейся на его сигнальных входах. После окончания сообщения и обработки последнего знака устройство переходит в дежурный режим .(например, в мо.мент t ). Блок 9 анализа движения каретки по сигналам (фиг. Зк,л), поступающим с формирователя 8 сигналов начала и конца поля знака, продолжает следить за перемещением каретки от воздействия мешающих факторов (качка, боковые удары), производя отсчет результирующего смещения каретки от позиции печати последнего символа. Если поступившая после перерыва информация является продолжением предьщущего сообщения (т.е. начинается не со служебных команд ВК и ПС), то, как только на шестом выходе блока 3 управления появится первьш импульс (фиг. Зо«:, момент 13) сигнала возбуждения обмоток электродвигателя блока 6, блок 9 блокирует (фиг. 3п) вывод разложения символа для регистрации его блоком 4 печати и выдает сигнал (фиг. Зс,х) направления необходимого перемещения каретки, которая под воздействием сигналов с шестого выхода блока 3 управления начинает движение в указанном направлении до позиции печати, соседней с позицией последнего отпечатанного символа. По достижении кареткой нужной позиции блок 9 анализа движения каретки снимает свои сигналы и блок 3 управления производит отработку комбинации принятого символа вьшеописанным способом.
Если же после перерыва первой комбинации будет служебная комбинация возврата каретки, то блок 3 управления, произведя ее дешифрацию, вместе с вьщачей команды на ее испол
нение подает сигнал на третий вход блока 9 анализа движения каретки. Этим сигналом блок У ан.ализа двшке- ния каретки будет переведен в исходное сстстряние, в котором он оста- ется до тех пор, пока присутствует указанньй сигнал на его входе, т.е. до возврата каретки к началу строки.
Под воздействием сигнала с. третьего управляющего выхода блока 3 управления, поступающего через элемент И 11, элемент ИЛИ 15 на блок 6 шагового электропривода каретки, электро приводу каретки задается обратное направление вращения, отрабатывая которое, он (электропривод) переместит каретку к началу строки. Как только каретка встанет на позидию первого знака с блока 4 печати на блок 3 управления, поступит сигнал, по которому блок 3 управления приступит к обработке следующей кодовой комбинации. Далее работа устройства будет происходить аналогично вышеописан- ному.
Формула изобретения
1. Приемник электронного рулонного
,г-
телеграфного аппарата, содержащий приемно-наборный блок, выход которого соединен с первым входом буферного накопителя, выходы которого подключены к первым входам блока управления,
второй вход которого ПОД1СПЮЧеН к ВЫ
ходу блока печати, первые входы которого соединены с выходами блока шагового электропривода каретки и с входами первого датчика моментов печати, выход которого соединен с третьим входом блока управления, первьй выход которого соединен со вторым входом блока печати, отличающи-йся тем, что, с целью повьш1ения достоверности приема информации при мешающих механических воздействиях, введены второй датчик моментов печати, формирователь сигналов начала и конца поля знака, первьй и второй элементы И, первый и второй элементы ИЛИ, два элемента запрета и блок анализа движения каретки, первый выход которого соединен с первым входом первого элемента запрета, с первыми входами первого и второго элементов И и с первым входом второго элемента запрета, выходы которого подключены к третьим входам блока печати, первые входы
5
0
0
5
0
5
0
которого соединены с входами второго датчика моментов печати, выход которого соединен с первым входом формирователя сигнала начала и конца поля знака, второй вход которого соединен с третьим входом блока управления, второй выход которого подключен к второму входу первого элемента И, выход которого соединен с первым входом первого элемента ИЛИ, выход которого соединен с первым входом блока шагового электропривода каретки, -. второй вход которого подключен к выходу второго элемента ИЛИ, первый вход которого подключен к выходу второго элемента И, второй вход которого соединен с первым входом блока анализа движения каретки и с третьим выходом блока управления, четвертый выход которого соединен с вторым входом первого элемента запрета и со вторым входом блока анализа движения каретки, третий вход которого соединен с третьим входом блока шагового электропривода каретки и с пятым выходом блока управления, четвертьй вход которого соединен с четвертым входом блока анализа движения каретки, второй и третий выходы которого подключены к вторым входам соответственно первого и второго элементов ИЛИ, первьй и второй выходы формирователя сигналов начала и конца поля знака соединены соответственно с пятым и шестым входами блока анализа движения каретки, выход первого блока запрета подключен к второму входу буферного накопителя, шестые выходы блока управления соединены с вторыми входами второго элемента запрета, при этом вход приемно-наборно- го блока является информационным входом приемника, установочным вхо- дом которого является четвертьй вход блока управления.
2. Приемник по п, 1, о т л и- чающийся тем, что блок анализа движения каретки содержит анализатор направления движения каретки, формирователь сигналов управления, узел отсчета результатов смещения каретки и элемент ИЛИ, выход которого соединен с первым входом анализатора направления движения каретки и с первым входом узла отсчета результатов смещения каретки, второй и третий входы которого подключены соответственно к первому и второму
выходам анализатора направления движения каретки, третий выход которого соединен с первым входом формирователя сигналов управления, первый и второй выходы которого соединены соответственно с четвертым и пятым входами узла отсчета результатов смещения каретки, первый и второй выходы которого подключены соответственно к второму и третьему входам форми- рователя сигналов управления, четвертый вход которого соединен с шестым входом узла отсчета результатов смещения каретки и со,вторым входом анализатора направления движения каретки, третий вход которого подключен
к пятому входу формирователя сигналов управления, при этом первый вход элемента ИЛИ, шестой и седьмой входы формирователя сигналов управления, второй вход элемента ИЛИ, второй и третий входы анализатора направления движения каретки являются соответственно первым, вторым, третьим, четвертым, пятым и шестым входами блока анализа движения каретки, первым, вторым и третьим выходами которого являются соответственно третий выход формирователя сигналов управления и третий и первый выходы узла отсчета результатов смещения каретки.
cpue.Z
Составитель О.Геллер Редактор Б.Ковтун Техред И.Попович Корректор М.Пожо
Заказ 7918/59 Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4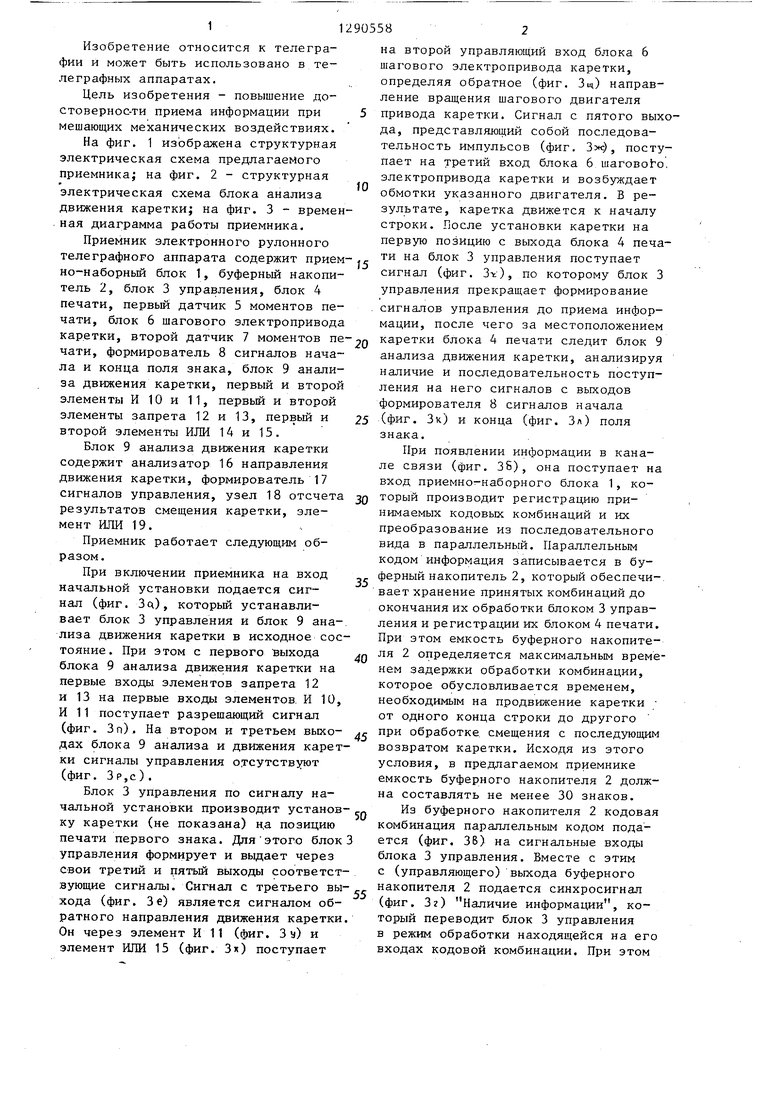
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемопередающее телеграфное устройство | 1989 |
|
SU1783633A1 |
| ПРИЕМНИК РУЛОННОГО ТЕЛЕГРАФНОГО АППАРАТА | 1990 |
|
RU2017338C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ | 1990 |
|
RU2012149C1 |
| Устройство для регистрации информации | 1989 |
|
SU1603412A1 |
| Автономное телеграфное печатающее устройство | 1976 |
|
SU664306A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО | 2009 |
|
RU2410844C2 |
| Печатающее устройство | 1976 |
|
SU627465A1 |
| Устройство приема и передачи дискретных сигналов | 1979 |
|
SU856031A1 |
| Приемник телеграфного аппарата | 1978 |
|
SU794761A1 |
| Печатающее устройство с переменным форматом | 1980 |
|
SU877586A1 |
Изобретение относится к телеграфии. Цель изобретения - повышение достоверности приема информации при мешающих механических воздействиях. Приемник содержит приемно-наборный блок 1, буферный накопитель 2, блок управления (БУ) 3, блок печати 4, два датчика 5 и 7 моментов печати, блок шагового электропривода 6 каретки, формирователь (Ф) 8 сигналов начала и конца поля знака, блок анализа (БА) 9 движения каретки, два эл-та И 10 и 11, два эл-та запрета 12 и 13 и два эл-та ИЛИ 14 и 15. БА 9 по сигналам, поступающим с Ф 8, следит за перемещением каретки от воздействия мешающих факторов (кач-, ка, боковые удары), производя отсчет результирующего смещения каретки от позиции печати последнего символа. Если поступившая после перерыва информация является продолжением предыдущего сообщения, то формируется сигнал направления необходимого перемещения каретки, которая начнет движение в указанном направлении до позиции печати, соседней с позицией последнего отпечатанного символа. При достижении кареткой нужной позиции БА 9 снимает свои сигналы и БУ 3 производит отработку комбинации принятого символа. Цель достигается введением датчика 7, Ф 8, БА 9, эл-тов И 10 и 11, эл-тов задержки 12 и 13 и эл-тов ИЛИ 14 и 15. Приемник по п. 2 ф-лы отличается выполнением БА 9, дана его ил. 1 з.п. ф-лы, 3 ил. I (Л IND о ел ел 00 paff)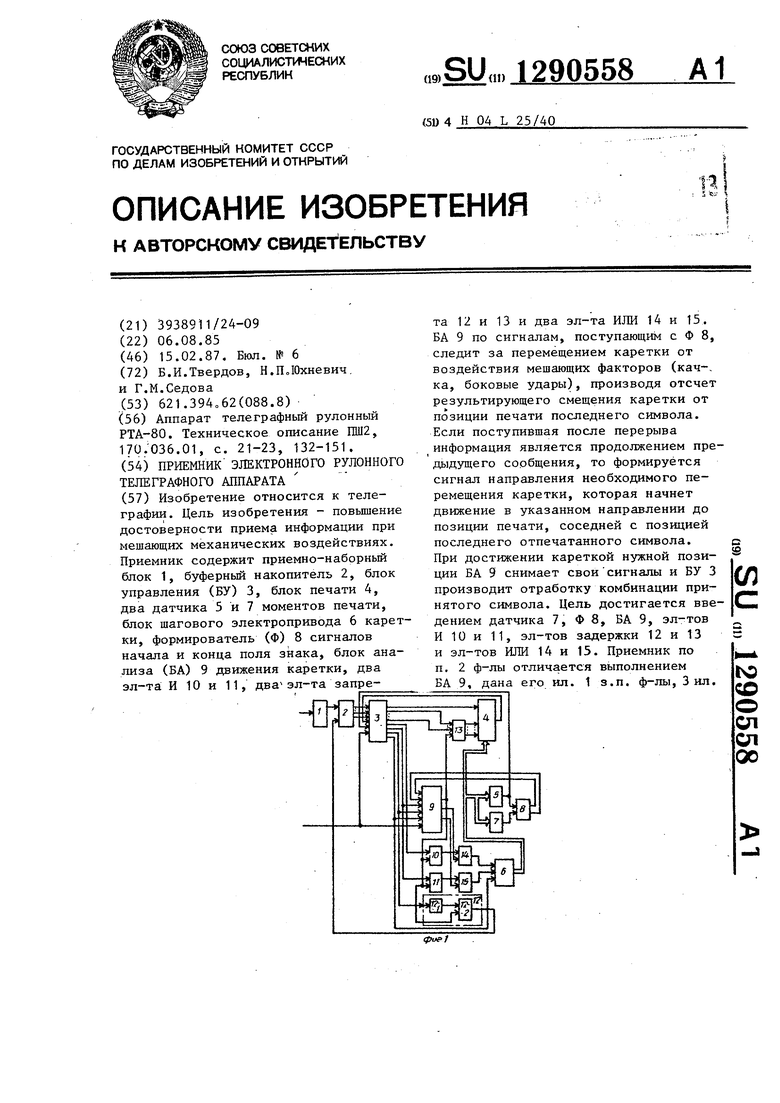
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
