1292
соров, воздуходувок, обратимых агрегатов гидроаккумулирующих станцийi Целью изобретения является повышение срока службы электропривода и расширение его функциональных возможностей. Цель достигается за счет введения задатчика I6 и регулятора 12 темпа торможения, блока 13 установки регулятора 12 темпа торможения в исходное состояние, датчика 14 частоты
1
Изобретение относится к электротехнике и может быть использовано для запуска, синхронизации с сетью и рекуперативного торможения мощных синхронных электроприводов компенсаторов, воздуходувок, обратимых агрегатов гидроаккумулирующих станций.,
Цель изобретения - увеличение срока службы электропривода-за счет линейного уменьшения частоты вращения синхронного электродвигателя в режиме рекуперативного торможения и расширение функциональных возможностей.
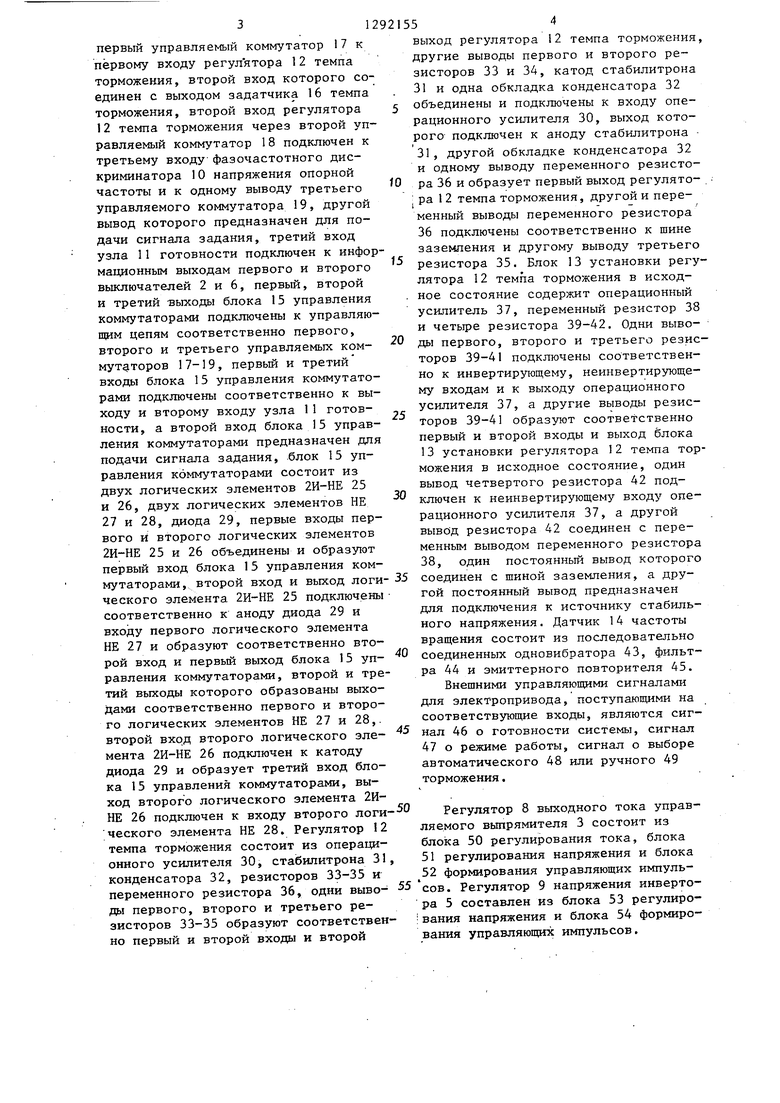
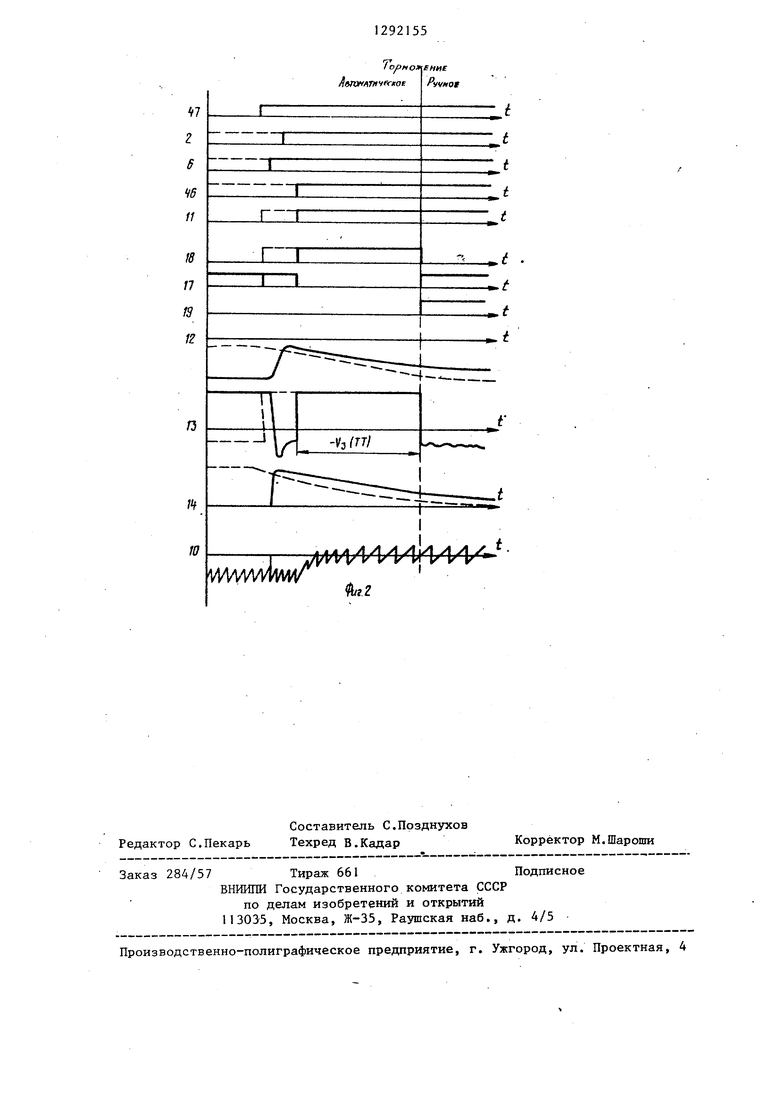
На фиг.1 приведена электрическая схема электропривода переменная тока; на фиг.2 - временные диаграммы, поясняющие работу электропривода.
Электропривод переменного тока содержит синхронный электродвигатель 1, подключенный к шинам питающей сети через последовательно соединенные первый выключатель 2, управляемый вьшрямитель 3, реактивный накопитель 4, инвертор 5, второй выключатель 6 и третий выключатель 7, включенный между шинами питающей сети и синхронным электродвигателем 1, регулятор 8 выходного тока управляемого выпрямителя 3, регулятор 9 напряжения инвертора 5, фазочастотный дискриминатор 10 напряжения опорной частоты, узел 11 готовности, регулятор 12 темпа торможения, блок 13 установки регулятора 12 темпа торможения в исходное состояние, датчик 14 частоты вращения, блок 15 управления коммутаторами, задатчик 16 темпа торможения, первый, второй и третий управляемые коммутаторы 17-19, выход узла 11 готовности подключен к первым входам регулятора 8 выходного
5
вращения электродвигателя, трех управляемых коммутаторов 17, 18, 19 с блоком 15 управления. Обеспечивается увеличение срока службы электропривода за счет линейного уменьшения частоты вращения синхронного электродвигателя в режиме рекуперативного тормо жения и расширение функциональных возможностей. 2 з.п. ф-лы, 2 ил.
o
5
0
5
0
5
0
тока управляемого выпрямителя 3 и регулятора 9 напряжения инвертора 5, вторые входы которых объединены и подключены к датчику 20 входного напряжения инвертора 5, третий вход регулятора 9 напряжения инвертора 5 подключен к выходу фазочастотного дискриминатора IО напряжения опорной частоты, первый вход которого объединен с четвертым входом регулятора 9 напряжения инвертора 5 и подключен к датчику 21 выходного напряжения инвертора 5, тре гий, четвертьй и пятый входы регулятора 8 выходного тока управляемого выпрямителя 3 подключены соответственно к датчику 22 напряжения питающей сети, датчику 23 входного тока управляемого выпрямителя 3 и датчику 24 выходного напряжения управляемого выпрямителя 3, выход регулятора 8 выходного тока управляемого выпрямителя 3 и первый выход регулятора 9 напряжения инвер тора 5 подключены к управляющим цепям соответственно управляемого выпрямителя 3 и инвертора 5, второй вход фазочастотного дискриминатора 10 напряжения опорной частоты подключен к датчику 22 напряжения питающей сети,, вход датчика 14 частоты вращения подключен к второму выходу регулятора 9 напряжения инвертора 5, выход датчика 14 частоты вращения подключен к первому входу блока 13 установки регулятора 12 темпа торможения в исходное состояние, второй вход которого подключен к первому выходу регулятора I2 темпа торможения, выход блока 13 установки регулятора 12 темпа торможения в исходное состояние подключен через
первый управляемый коммутатор 17 к первому входу регулятора 12 темпа торможения, второй вход которого соединен с выходом задатчика 16 темпа торможения, второй вход регулятора 12 темпа торможения через второй управляемый коммутатор 18 подключен к третьему входу фазочастотного дискриминатора 10 напряжения опорной частоты и к одному выводу третьего управляемого коммутатора 19, другой вывод которого предназначен для подачи сигнала задания, третий вход узла 11 готовности подключен к инфор махщонным выходам первого и второго выключателей 2 и 6, первый, второй и третий выходы блока 15 управления коммутаторами подключены к управляющим цепям соответственно первого, второго и третьего управляемых ком- мут торов 17-19, первый и третий входы блока 15 управления коммутаторами подключены соответственно к выходу и второму входу узла 11 готовности, а второй вход блока 15 управления коммутаторами предназначен для подачи сигнала задания, блок 15 управления коммутаторами состоит из двух логических элементов 2И-НЕ 25 и 26, двух логических элементов НЕ 27 и 28, диода 29, первые входы первого и второго логических элементов 2И-НЕ 25 и 26 объединены и образуют первый вход блока 15 управления коммутаторами, второй вход и выход логического элемента 2И-НЕ 25 подключены соответственно к аноду диода 29 и входу первого логического элемента НЕ 27 и образуют соответственно второй вход и первый выход блока 15 управления коммутаторами, второй и третий выходы которого образованы выходами соответственно первого и второго логических элементов НЕ 27 и 28,. второй вход второго логического элемента 2И-НЕ 26 подключен к катоду диода 29 и образует третий вход блока 15 управления коммутаторами, выход второго логического элемента 2И- НЕ 26 подключен к входу второго логического элемента НЕ 28. Регулятор 12 темпа торможения состоит из операхщ- онного усилителя 30, ста(5илитрона 31 конденсатора 32, резисторов 33-35 и переменного резистора 36, одни выводы первого, второго и третьего резисторов 33-35 образуют соответственно первый и второй входы и второй
5
0
5
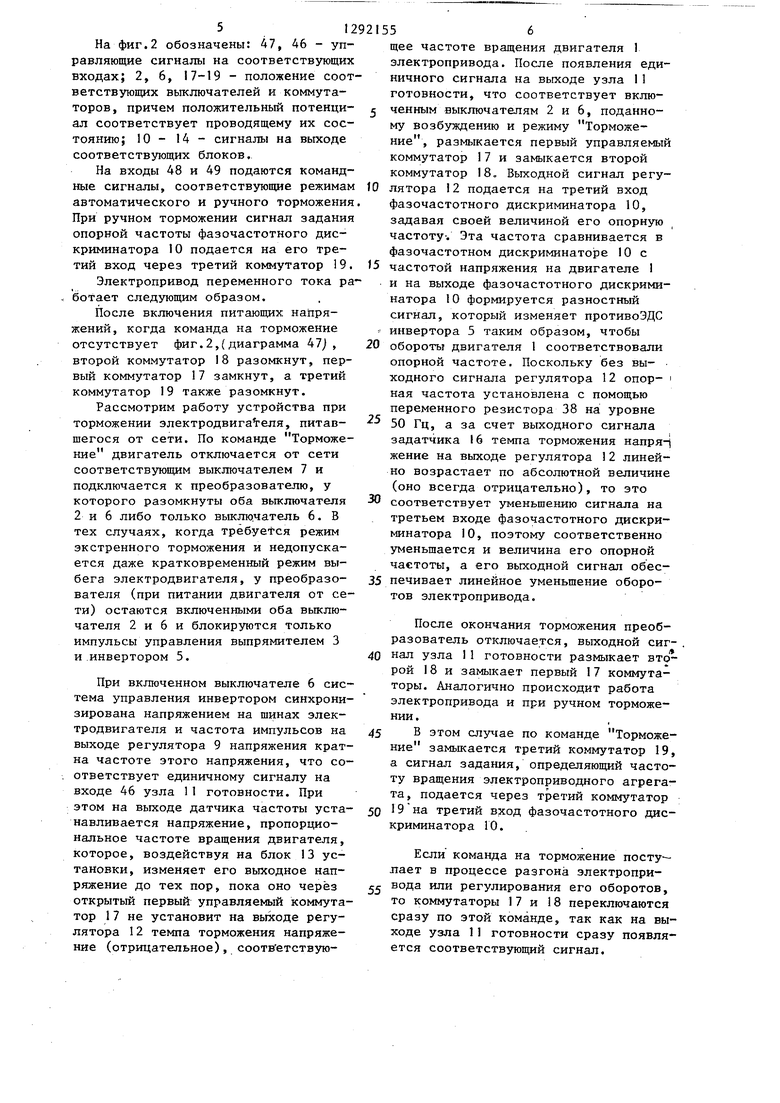
выход регулятора 12 темпа торможения, другие выводы первого и второго резисторов 33 и 34, катод стабилитрона 31 и одна обкладка конденсатора 32 5 объединены и подключены к входу операционного усилителя 30, выход которого подключен к аноду стабилитрона - 31, другой обкладке конденсатора 32 и одному выводу переменного резисто0 ра 36 и образует первый выход регулято- I ра 1 2 темпа торможения, другой и переменный выводы переменного резистора 36 подключены соответственно к шине заземления и другому выводу третьего резистора 35. Блок 13 установки регулятора 12 темпа торможения в исходное состояние содержит операционный усилитель 37, переменный резистор 38 и четыре резистора 39-42. Одни выводы первого, второго и третьего резисторов 39-41 подключены соответственно к инвертирующему, неинвертирующему входам и к выходу операционного усилителя 37, а другие выводы резисторов 39-41 образуют соответственно первый и второй входы и выход блока 13 установки регулятора 12 темпа торможения в исходное состояние, один вывод четвертого резистора 42 подключен к неинвертирующему входу операционного усилителя 37, а другой вывод резистора 42 соединен с переменным выводом переменного резистора 38, один постоянный вывод которого
5 соединен с шиной заземления, а другой постоянный вывод предназначен для подключения к источнику стабильного напряжения. Датчик 14 частоты вращения состоит из последовательно
0 соединенных одновибратора 43, фильтра 44 и эмиттерного повторителя 45. Внешними управляющими сигналами для электропривода, поступающими на соответствующие входы, являются сиг нал 46 о готовности системы, сигнал 47 о режиме работы, сигнал о выборе автоматического 48 или ручного 49 торможения.
0 Регулятор 8 выходного тока управляемого выпрямителя 3 состоит из блока 50 регулирования тока, блока
51регулирования напряжения и блока
52формирования управляющих импуль- 5 сов. Регулятор 9 напряжения инвертора 5 составлен из блока 53 регулиро вания напряжения и блока 54 формирования управляющих импульсов.
0
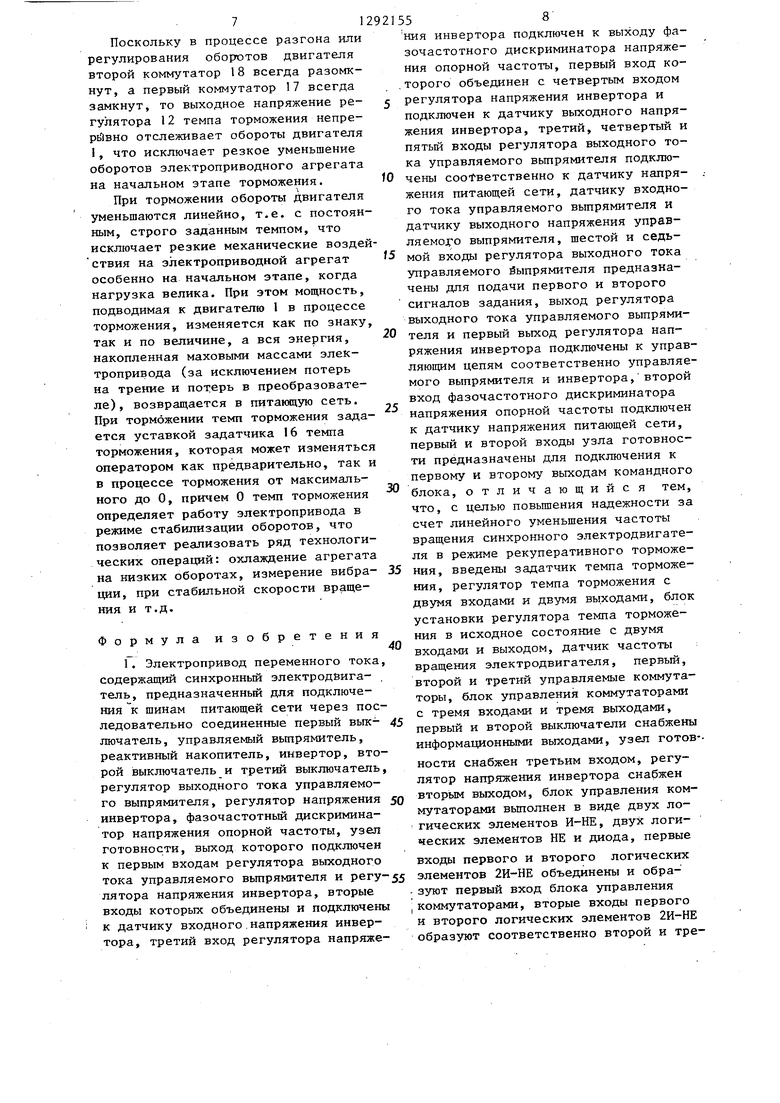
На фиг.2 обозначены: 47, 46 - управляющие сигналы на соответствующих входах; 2, 6, 17-19 - положение соответствующих вьшлючателей и коммутаторов, причем положительный потенциал соответствует проводящему их состоянию; 0 - 14 - сигналы на выходе соответствующих блоков.
На входы 48 и 49 подаются командные сигналы, соответствующие режимам автоматического и ручного торможения При ручном торможении сигнал задания опорной частоты фазочастотного дискриминатора 10 подается на его третий вход через третий коммутатор 19.
Электропривод переменного тока ра боТает следующим образом.
После включения питающих напряжений, когда команда на торможение отсутствует фиг.2,( диаграмма 47J , второй коммутатор 8 разомкнут, первый коммутатор 7 замкнут, а третий коммутатор 19 также разомкнут.
Рассмотрим работу устройства при торможении электродвигателя, питавшегося от сети. По команде Торможение двигатель отключается от сети соответствующим выключателем 7 и подключается к преобразователю, у которого разомкнуты оба выключателя 2 и 6 либо только выключатель 6. В тех случаях, когда требуется режим экстренного торможения и недопуска- ется даже кратковременный режим выбега электродвигателя, у преобразователя (при питании двигателя от сети) остаются включенными оба выключателя 2 и 6 и блокируются только импульсы управления выпрямителем 3 и инвертором 5.
При включенном выключателе 6 система управления инвертором синхронизирована напряжением на шинах электродвигателя и частота импульсов на выходе регулятора 9 напряжения кратна частоте этого напряжения, что соответствует единичному сигналу на входе 46 узла 11 готовности. При этом на выходе датчика частоты устанавливается напряжение, пропорциональное частоте вращения двигателя, которое, воздействуя на блок 13 установки, изменяет его выходное напряжение до тех пор, пока оно через открытый первый управляемый коммутатор 17 не установит на выходе регулятора 12 темпа торможения напряжение (отрицательное), соотв етствую
0
щее частоте вращения двигателя 1 электропривода. После появления единичного сигнала на выходе узла I1 готовности, что соответствует включенным выключателям 2 и 6, поданному возбуждению и режиму Торможение, размыкается первый управляемый коммутатор 17 и замыкается второй коммутатор 18„ Выходной сигнал регулятора 12 подается на третий вход фазочастотного дискриминатора 10, задавая своей величиной его опорную частоту . Эта частота сравнивается в фазочастотном дискриминаторе 10 с
5 частотой напряжения на двигателе 1 и на выходе фазочастотного дискриминатора 10 формируется разностный сигнал, который изменяет противоЭДС инвертора 5 таким образом, чтобы обороты двигателя 1 соответствовали опорной частоте. Поскольку без вы- ходного сигнала регулятора 12 опор- i ная частота установлена с помощью переменного резистора 38 на уровне
50 Гц, а за счет выходного сигнала задатчика 16 темпа торможения напря-| жение на выходе регулятора 12 линейно возрастает по абсолютной величине (оно всегда отрицательно), то это соответствует уменьшению сигнала на третьем входе фазочастотного дискриминатора 10, поэтому соответственно уменьшается и величина его опорной частоты, а его выходной сигнал обес5 печивает линейное уменьшение оборотов электропривода.
После окончания торможения преобразователь отключается, выходной сиг0 нал узла 1 1 готовности размыкает рой 18 и замыкает первый 17 коммутаторы. Аналогично происходит работа электропривода и при ручном торможении.
5 В этом слуг1ае по команде Торможение замыкается третий коммутатор 19, а сигнал задагшя, определяющий частоту вращения электроприводного агрегата, подается через третий коммутатор
0 19 на третий вход фазочастотного дискриминатора ГО.
Если команда на торможение посту- лает в процессе разгона электропри- 2 вода или регулирования его оборотов, то коммутаторы 17 и 18 переключаются сразу по этой команде, так как на выходе узла 11 готовности сразу появляется соответствующий сигнал.
0
71
Поскольку в процессе разгона или регулирования оборотов двигателя второй коммутатор 18 всегда разомкнут, а первый коммутатор 17 всегда замкнут, то выходное напряжение ре- гулятора 12 темпа торможения непре- рйвно отслеживает обороты двигателя 1, что исключает резкое уменьшение оборотов электроприводного агрегата на начальном этапе торможения.
При торможении обороты Двигателя уменьшаются линейно, т.е. с постоянным, строго заданным темпом, что исключает резкие механические воздей ствия на злектроприводной агрегат особенно на начальном этапе, когда нагрузка велика. При этом мощность, подводимая к двигателю I в процессе торможения, изменяется как по знаку так и по величине, а вся энергия, накопленная маховыми массами электропривода (за исключением потерь на трение и потерь в преобразователе) , возвращается в питающую сеть. При торможеиии темп торможения задается уставкой задатчика 16 темпа торможения, которая может изменяться оператором как предварительно, так и в процессе торможения от максимального до О, причем О темп торможения определяет работу электропривода в режиме стабилизации оборотов, что позволяет реализовать ряд технологических операций: охлаждение агрегата на низких оборотах, измерение вибра- ции, при стабильной скорости вращения и т.д.
Формула изобретения
1. Электропривод переменного тока, содержащий синхронный электродвигатель, предназначенный для подключения к шинам питающей сети через последовательно соединенные первый вык- 45 лючатель, управляемый вьтрямитель, реактивный, накопитель, инвертор, второй выключатель и третий выключатель, регулятор выходного тока управляемого выпрямителя, регулятор напряжения 50 инвертора, фазочастотный дискриминатор напряжения опорной частоты, узел готовности, выход которого подключен к первым входам регулятора выходного тока управляемого вьтрямителя и регу-55 лятора напряжения инвертора, вторые входы которых объединены и подключены к датчику входного.напряжения инвертора, третий вход регулятора напряже
5 0
0 5
5
0
0
5 0 5
558
ния инвертора подключен к выходу фа- зочастотного дискриминатора напряжения опорной частоты, первый вход ко- .торого объединен с четвертым входом регулятора напряжения инвертора и подключен к датчику выходного напряжения инвертора, третий, четвертый и пятый входы регулятора выходного тока управляемого вьтрямителя подключены соответственно к датчику напряжения питающей сети, датчику входного тока управляемого вьтрямителя и датчику выходного напряжения управ- ляeмoJГo выпрямителя, шестой и седьмой входы регулятора выходного тока управляемого выпрямителя предназначены для подачи первого и второго сигналов задания, выход регулятора выходного тока управляемого выпрямителя и первый выход регулятора напряжения инвертора подключены к управляющим цепям соответственно управляемого выпрямителя и инвертора, второй вход фазочастотного дискриминатора напряжения опорной частоты подключен к датчику напряжения питающей сети, первый и второй входы узла готовности предназначены для подключения к первому и второму выходам командного блока, отличающийся тем, что, с целью повьшения надежности за счет линейного уменьшения частоты вращения синхронного электродвигателя в режиме рекуперативного торможения, введены задатчик темпа торможения, регулятор темпа торможения с двумя входами и двумя выходами, блок установки регулятора темпа торможения в исходное состояние с двумя входами и выходом, датчик частоты вращения электродвигателя, первый, второй и третий управляемые коммутаторы, блок управления коммутаторами с тремя входами и тремя выходами, первый и второй выключатели снабжены информационными выходами, узел готов-ности снабжен третьим входом, регулятор напряжения инвертора снабжен вторым выходом, блок управления коммутаторами выполнен в виде двух логических элементов И-НЕ, двух логических элементов НЕ и диода, первые
входы первого и второго логических элементов 2И-НЕ объединены и образуют первый вход блока управления коммутаторами, вторые входы первого и второго логических элементов 2И-НЕ образуют соответственно второй и третий входы блока управления коммутаторами, выход первого логического элемента 2И-НЕ соединен с входом первого логического элемента НЕ и образует первый выход блока управления коммутаторами, вмход первого логического элемента НЕ образует второй выход блока управления коммутаторами, выход второго логического элемента 2И-НЕ соединен с входом второго логического элемента НЕ, выход которого образует третий выход блока управления коммутаторами, диод подключен анодом к второму входу первого логического элемента 2И-НЕ, а катодом - к второму входу второго логического элемента 2И-НЕ, первый,второй и третий выходы блока управления коммутаторами подключены к управляющим цепям соответственно первого, .второго и третьего управляемых коммутаторов, первый и третий входы блока управления коммутаторами подключены соответственно к выходу и второму входу узла готовности, второй вход блока управления коммутаторами предназначен для подключения к третьему выходу командного блока, вход датчика частоты вращения электродвигателя подключен к второму выходу регулятора напряжения инвертора, выход датчика частоты вращения электродвигателя подключен к первому входу блока установки регулятора темпа торможения в исходное состояние, второй вход которо го подключен к первому выходу регулятора темпа торможения, выход блока установки регулятора темпа торможения в исходное.состояние подключен через первый управляемый коммутатор к первому входу регулятора темпа тор- . можения, второй вход которого соединен с выходом задатчика темпа торможения, второй выход регулятора темпа торможения через второй управляемый коммутатор подключен к третьему входу фазочастотного дискриминатора напряжения опорной частоты и к одному выводу третьего управляемого коммутатора, другой вывод которого предназначен для подачи третьего сигнала задания, третий вход узла готовности
15
20
25
подключен к информационным вых-одам первого и второго выключателей.
2.Электропривод по п.J, о т л и- чающийся тем, что регулятор
5 темпа торможения содержит операционный усилитель, стабилитрон, конденсатор, три резистора, переменный резистор, одни выводы первого и второго резисторов, катод стабилитрона и
JO одна обкладка конденсатора объединены и подключены к входу операционного усилителя, другие выводы первого и второго резисторов образуют соответственно первый и второй входы регулятора темпа торможения, выход операционного усилителя подключен к аноду стабилитрона, одному постоянному выводу переменного резистора и другой обкладке конденсатора и образуют первый выход регулятора темпа торможения, другой постоянный вывод переменного резистора подключен к заземленной игине, а переменный вывод .переменного резистора соединен с одним выводом третьего резистора, другой вывод которого образует второй выход регулятора темпа торможения.
3.Электропривод по пп.1 и 2, отличающийся тем, что блок установки регулятора темпа торможения в исходное состояние содержит операционный усилитель, четыре резистора и переменный резистор, одни выводы первого, второго и тра- i
35 тьего резисторов подключены соответственно к инвертирующему, иеинверти- рующему входам и выходу операционного усилителя, а другие выводы первого, второго и третьего резисторов
40 образуют соответственно первый и второй входы и выход блока установки регулятора темпа торможения в исходное состояние четвертый резистор одним выводом подключен к неинвертирующему входу операционного усилителя, а другим выводом - к переменному вьюоду переменного резистора, один постоянный вывод которого подключен к заземляющей шине, а другой постоян50 ный вывод предназначен для подключения к источнику стабильного напряжения .
30
45
Редактор С.Пекарь
Составитель С.Прзднухов Техред В.Кадар
Заказ 284/57 Тираж 661Подписное
ВНРТИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Шароши
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1984 |
|
SU1377994A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронного электродвигателя | 1983 |
|
SU1112516A1 |
| Статический преобразователь частоты для синхронной машины | 1977 |
|
SU699626A1 |
| Устройство для частотного пуска синхронной машины | 1979 |
|
SU855908A1 |
| Реверсивный управляемый электропривод | 1985 |
|
SU1275729A1 |
| Статический преобразователь частоты для синхронной машины | 1978 |
|
SU788319A2 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
| Устройство для контроля и регулирования производительности | 1990 |
|
SU1791032A1 |
| Устройство для управления синхронным электродвигателем | 1988 |
|
SU1621134A1 |
Изобретение относится к электротехнике и может быть использовано для запуска, синхронизации с сетью и рекуперативного торможения мощных синхронных электроприводов компресv tt L ю -6W/
| Колоколкин A.M | |||
| Система регулирования тиристорным преобразователем частоты для пуска мощных синхронных машин | |||
| - В кн.: Высоковольтные тирис- торные преобразователи | |||
| М.: Изд | |||
| ЭНИНа, 1981, с | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВЫЧЕРЧИВАНИЯ ДУГ ОКРУЖНОСТИ ПРИ КРОЙКЕ | 1927 |
|
SU10000A1 |
| Шкаф управления (контроллер) | |||
| Техническое описание и инструкция по эксплуатации | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - Таллин: ПО ТЭЗ им | |||
| М.И.Калинина, 1981, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
