рования достижения заданной частоты вращения электродвигателя. Устройство содержит RS-триггеры 1, 2, 3, 4, соединенные с логическими элемештами 11, 12, 13, 14,, 15, 16„ 17, 18, схему совпадения 19, элемент задержки 20, блок 21 моделирс(ани.я достижения заданной частоты вращения на 29 выходе которого -включен сдвоеиньш компаратор 22, и RS-триггер 23. По сигналам КЗ-триггера 23 через логические элементы 13, 17, 14, 18 и блок усилителей 24 осуществляется управление силовым коммутатором 25, включенным в цепь питания электродвигателя, 1 з.п. ф-лы, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2054223C1 |
| Ключ переменного тока | 1990 |
|
SU1725380A1 |
| Устройство для управления взаимосвязанным движением механизмов | 1984 |
|
SU1287098A1 |
| Устройство для управления реверсивным асинхронным электродвигателем | 1987 |
|
SU1444927A1 |
| Устройство управления фотозатвором | 1982 |
|
SU1067469A1 |
| Лотовый уровнемер | 1986 |
|
SU1381338A1 |
| Устройство управления напряжением при контактной сварке | 1984 |
|
SU1252102A1 |
| Ключ переменного тока | 1982 |
|
SU1066035A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1273758A1 |
Изобретение относится к области электротехники и может быть использовано для управления электроприводами в гибких автоматизированных производствах, промышленных роботах и станках. Целью изобретения является повышение точности позиционирования. Изобретение позволяет повысить точность позиционирования электропривода с самотормозящимися электродйигателем за счет импульсного подведения его к заданной позиции без использования датчиков текущих значений скорости и положения путем контроля аналога скорости электродвигателя - выходного напряжения блока 21 модели(Л г7 UMUKC
Изобретение относится к электротехнике и может быть использовано дл управления электроприводами в гибкт автоматизированных производствах,промьшшенных роботах и станках.
Цель изобретения - повьшение точности позиционирования,
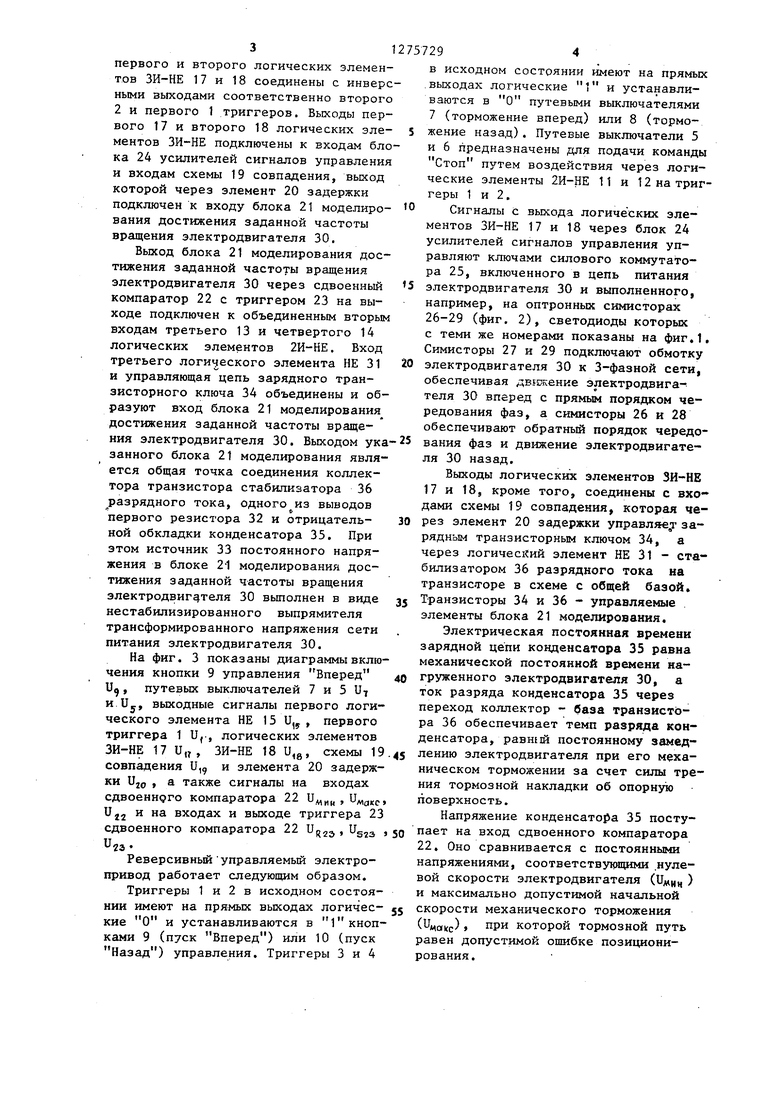
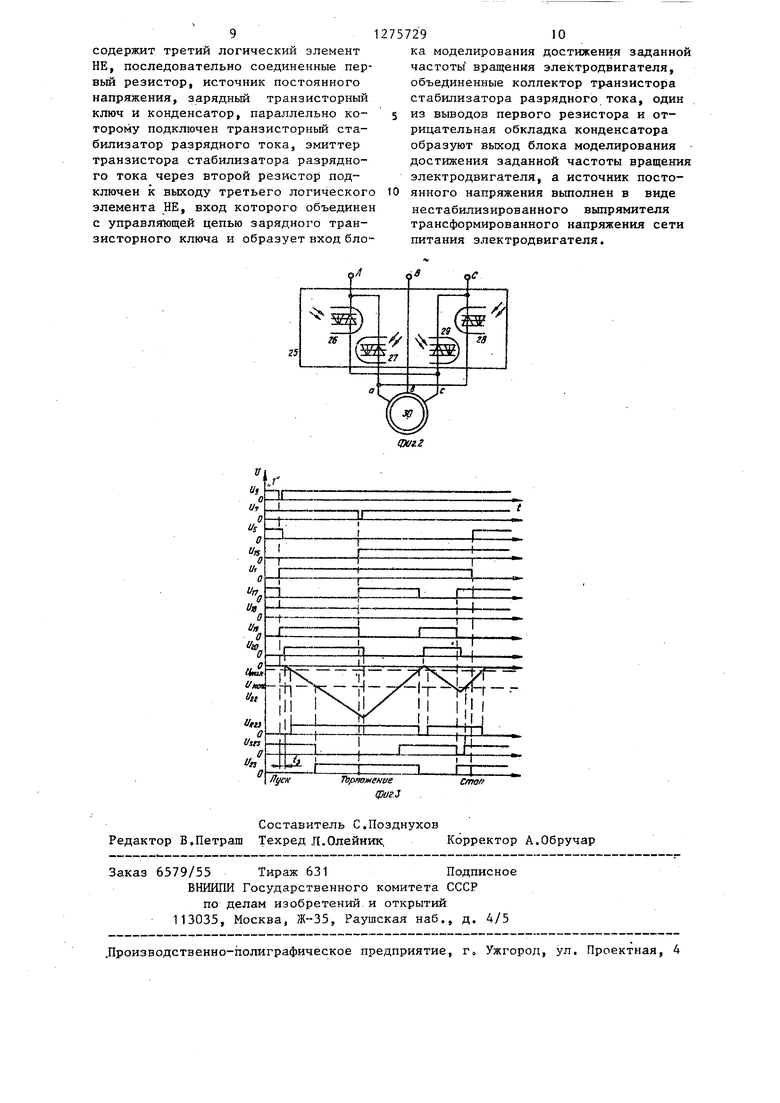
На фиг, 1 приведена принципиальная схема реверсивного управляемого электропривода5 на фиг. 2 - схема силового коммутатора с электродвигателем; на фиг. 3 - временные диаграммы работы системы управления электроприводом„
Реверсивньш управляемый электропривод содержит четыре КЗ-триггера 1-4, путевые выключатели 3-8, кнопку 9 управления Вперед и кнопку 10 управления Назад, четыре логических элемента 2И-НЕ 11-14, первый и второй логические элементы НЕ 15 и 16, два логических элемента ЗИ-НЕ 17 и 18, схему 19 совпадения, элемент 20 задержки блок 21 моделирования достижения заданной частоты вращения электродвигателя, сдвоеннЬ1й компаратор 22 с триггером 23 на выходе, блок 24 усилителей сигналов управления, соединенный выход.зми . с управляющими цепями силового коммутатора 25, построенного, напр:кмер, на оптронных симисторах 26-29 и включенного в цепь питания с.амотормозящ гося электродвигателя 30. Блок 21 моделирования достижения заданной частоты вращения электродвигателя содержит третий логический элемент НЕ 31, последовательно соединенные первый резистор 32, источник 33 постоянного напряженияэ зарядный транзисторный ключ 34: ,и конденсатор 35, параллельно которому подключен транзисторный стабилизатор 36 разрядного тока, цепь управления которого соединена через второй резистор 37 с выходом третьего логического элемента НЕ 31 .
Последовательна соединенные первый 5 и второй 6 путевые выключатели подключены к объединенным первым входам первого 11 и второго 12 логических элементов 2И-НЕ, выходы которых соединены с К-входами соответственно первого 1 и второго 2 триггеров. Вторые входы первого 11 и второго 12 логических элементов 2И-НЕ
соединены с инверсными выходами соответственно третьего 3 и четвертого 4 триггеров, R-входы которых подключены соответственно к третьему 7 и четвертому 8 путевым выключателям,
а S-входы соединены с прямыми выходами соответственно первого 1 и второго 2 триггеров. S-входы первого 1 и второго 2 триггеров соединены соответственно с кнопками 9 и 10 управления Вперед и Назад.
Прямой выход третьего триггера 3 через первый логический элемент НЕ 15 соединен с первым входом третьего логического элемента 2И-НЕ 13,
выход которого соединен с первым входом первого логического элемента ЗИ-НЕ 17. Прямой выход четвертого триггера 4 через второй логический элемент НЕ 16 соединен с первым входом четвертого логического элемента 2И-НЕ 14, втзкод которого подключен к первому входу второго логического элемента ЗИ-НЕ 8. Вторые входы первого и второго логических элементов
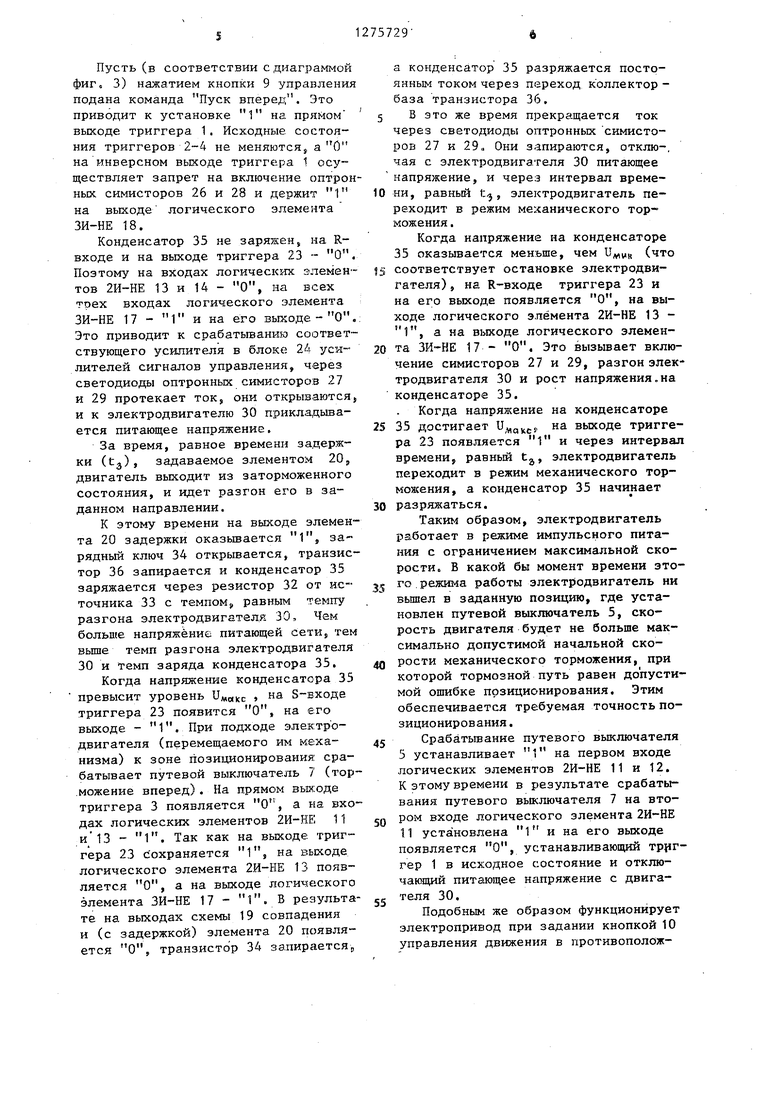
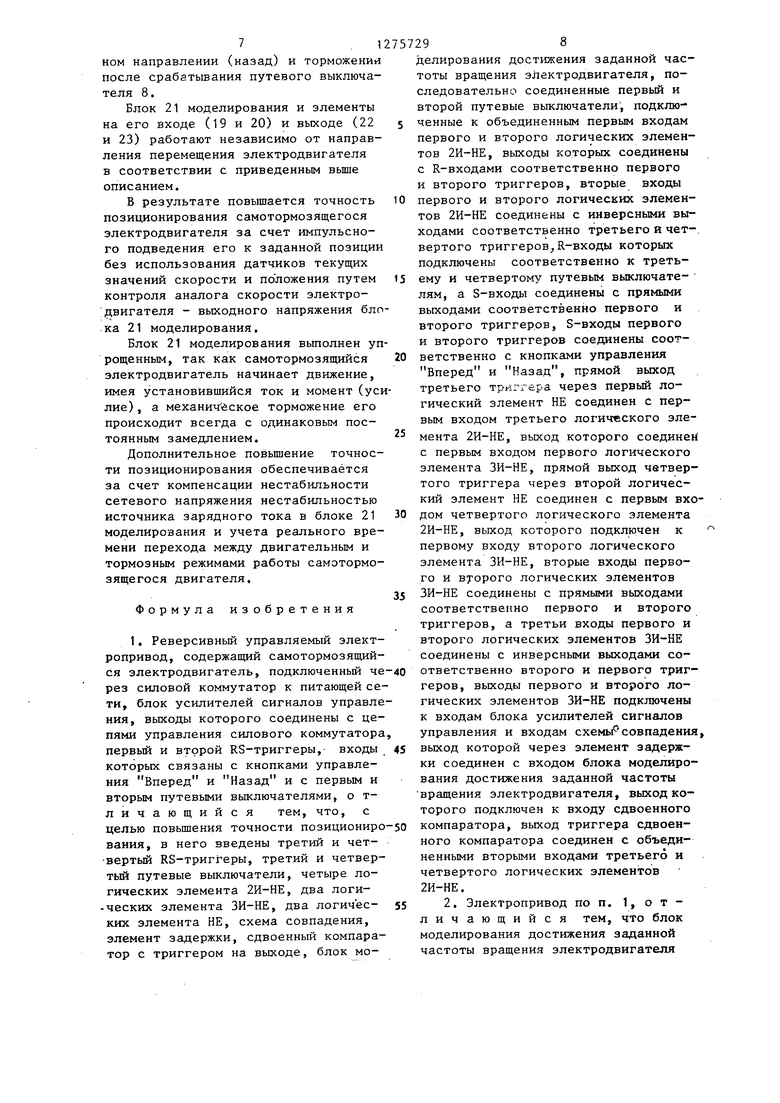
ЗИ-НЕ 17 и 18 соединены с прямыми выходами соответственно первого 1 и второго 2 триггеров, а третьи входы 3 первого и второго логических элементов ЗИ-НЕ 17 и 18 соединены с инверс ными выходами соответственно второго 2 и первого 1 триггеров. Выходы первого 17 и второго 18 логических элементов ЗИ-НЕ подключены к входам бло ка 24 усилителей сигналов управления и входам схемы 19 совпадения, выход которой через элемент 20 задержки подключен к входу блока 21 моделирования достижения заданной частоты вращения электродвигателя 30. Выход блока 21 моделирования достижения заданной частоты вращения электродвигателя 30 через сдвоенный компаратор 22 с триггером 23 на выходе подключен к объединенным вторым входам третьего 13 и четвертого 14 логических элементов 2И-НЕ. Вход третьего логического элемента НЕ 31 и управляющая цепь зарядного транзисторного ключа 34 объединены и образуют вход блока 21 моделирования достижения заданной частоты вращения электродвигателя 30. Выходом ука занного блока 21 моделирования является общая точка соединения коллектора транзистора стабилизатора 36 разрядного тока, одного из выводов первого резистора 32 и отрицательной обкладки конденсатора 35. При этом источник 33 постоянного напряжения в блоке 21 моделирования достижения заданной частоты вращения электродвигателя 30 вьшолнен в виде нестабилизированного выпрямителя трансформированного напряжения сети питания электродвигателя 30. На фиг. 3 показаны диаграммы включения кнопки 9 управления Вперед путевых выключателей 7 и 5 U7 и.и, выходные сигналы первого логического элемента НЕ 15 U первого триггера 1 U, , логических элементов ЗИ-НЕ 17 и,| , ЗИ-НЕ 18 U,g, схемы 19 совпадения U,g и элемента 20 задержа также сигналы на входах сдвоеннрго компаратора 22 U мин Uj2 и на входах и выходе триггера 23 сдвоенного компаратора 22 Реверсивныйуправляемый электропривод работает следующим образом. Триггеры 1 и 2 в исходном состояНИИ имеют на прямых выходах логичес- 55 кие О и устанавливаются в 1 кнопками 9 (пуск Вперед) или 10 (пуск Назад) управления. Триггеры 3 и 4 29 в исходном состоянии имеют на прямых вькодах логические Г и устанавли Оваются в О путевыми выключателями 7 (торможение вперед) или 8 (торможение назад). Путевые выключатели 5 и 6 предназначены для подачи команды Стоп путем воздействия через логические элементы 2И-НЕ 11 и 12 на триггеры 1 и 2. Сигналы с выхода логических элементов ЗИ-НЕ 17 и 18 через блок 24 усилителей сигналов управления управляют ключами силового коммутатора 25, включенного в цепь питания электродвигателя 30 и выполненного, например, на оптронных симисторах 26-29 (фиг. 2), светодиоды которых с теми же номерами показаны на фиг,1, Симисторы 27 и 29 подключают обмотку электродвигателя 30 к 3-фазной сети, обеспечивая дв5 жение электродвигателя 30 вперед с прямым порядком чередования фаз, а симисторы 26 и 28 обеспечивают обратный порядок чередования фаз и движение электродвигателя 30 назад. Выходы логических элементов ЗИ-НЕ 17 и 18, кроме того, соединены с входами схемы 19 совпадения, которая через элемент 20 задержки управл е,т зарядным транзисторным ключом 34, а через логический элемент НЕ 31 - стабилизатором 36 разрядного тока на транзисторе в схеме с общей базой. Транзисторы 34 и 36 - управляемые элементы блока 21 моделирования. Электрическая постоянная времени зарядной цепи конденсатора 35 равна механической постоянной времени нагруженного электродвигателя 30, а ток разряда конденсатора 35 через переход коллектор - база транзистора 36 обеспечивает темп разряда конденсатора, равшй постоянному замедлению электродвигателя при его механическом торможении за счет силы трения тормозной накладки об опорную поверхность. Напряжение конденсатора 35 поступает на вход сдвоенного компаратора 22, Оно сравнивается с постоянными напряжениями, соответствутрщими нулевой скорости электродвигателя () и максимально допустимой начальной скорости механического торможения (11,0,1) , при которой тормозной путь равен допустимой ошибке позиционирования.
Пусть (в соответствии с диаграммой фиг 3) нажатием кнопки 9 управления подана команда Пуск вперед. Это приводит к установке 1 на прямом выходе триггера 1. Исходные состояния триггеров 2-4 не меняются, на инверсном выходе триггера 1 осуществляет запрет на включение оптронных симисторов 26 и 28 и держит 1 на выходе логического элемента ЗИ-НЕ 18.
Конденсатор 35 не заряжен, на Rвходе и на выходе триггера 23 - О. Поэтому на входах логических элементов 2И-НЕ 13 и 14 - О, на всех трех входах логического элемента ЗИ-НЕ 17 - 1 и на его выходе- О. Это приводит к срабатьшанию соответствующего усилителя в блоке 24 уси лителей сигналов управления, через светодиоды оптронных симисторов 27 и 29 протекает ток, они открываются, и к электродвигателю 30 прикла,цьшается питающее напряжение.
За время, равное времени задержки (t.j) , задаваемое элементом 20, двигатель выходит из заторможенного состояния, и идет разгон его в заданном направлении.
К этому времени на выходе элемента 20 задержки оказывается I, за рядный ключ 34 открывается, транзистор 36 запирается и конденсатор 35 заряжается через резистор 32 от неточника 33 с темпом, равным темпу разгона электродвигателя 30, Чем больа1е напряжение питающей сети, тем вьше темп разгона электродвигателя 30 и темп заряда конденсатора 35.
Когда напряжение конденсатора 35 превысит уровень , на S-нходе триггера 23 появится О, на его выходе - 1. При подходе электродвигателя (перемещаемого им г еханизма) к зоне позиционирования срабатывает путевой выключатель 7 (тор.можение вперед). На прямом вьжоде триггера 3 появляется О, а на входах логических элементов 2И-НЕ; 11 и13 1. Так как на выходе триггера 23 сохраняется 1, на выходе логического элемента 2И-НЕ 13 появляется О, а на выходе логич€ ского элемента ЗИ-НЕ 17 - 1. В результате на выходах схемы 19 совпадения и (с задержкой) элемента 20 появляется О, транзистор 34 запирается
а конденсатор 35 разряжается постоянным током через переход коллектор база транзистора 36.
В это же время прекращается ток через светодиоды оптронных симисторов 27 и 29„ Они запираются, отклю-, чая с электродвигателя 30 питающее напряжение, и через интервал времени, равный 1:, электродвигатель переходит в режим механического тор можения.
Когда напряжение на конденсаторе 35 оказывается меньше, чем . (что соответствует остановке электродвигателя) 5 на R-входе триггера 23 и на его выходе появляется О, на выходе логического элемента 2И-НЕ 13 , а на выходе логического элемента ЗИ-НЕ 17 - О, Это вызьшает включение симисторов 27 и 29, разгон электродвигателя 30 и рост напряжения.на конденсаторе 35.
Когда напряжение на конденсаторе 35 достигает , на выходе триггера 23 появляется 1 и через интерва времени, равный tg, электродвигатель переходит в режим механического торможения, а конденсатор 35 начинает разряжаться.
Таким образом, электродвигатель работает в режиме импульсного питания с ограничением максимальной скорости. В какой бы момент времени этого режима работы электродвигатель ни вьшел в заданную позицию, где установлен путевой выключатель 5, скорость двигателя будет не больше максимально допустимой начальной скорости механического торможения, при которой тормозной путь равен допустимой ошибке позиционирования. Этим обеспечивается требуемая точность позиционирования .
Срабатьгоание путевого выключателя 5 устанавливает 1 на первом входе логических элементов 2И-НЕ 11 и 12. К этому времени в результате срабатывания путевого выключателя 7 на втором входе логического элемента 2И-НЕ 11 установлена 1 и на его выходе появляется О, устанавливающий трцггер 1 в исходное состояние и отключающий питающее напряжение с двигателя 30.
Подобным же образом функционирует электропривод при задании кнопкой 10 управления движения в противоположном направлении (назад) и торможении после срабатывания путевого выключателя 8.
Блок 21 моделирования и элементы на его входе (19 и 20) и выходе (22 5 и 23) работают независимо от направления перемещения электродвигателя в соответствии с приведенным выше описанием.
В результате повышается точность 10 позиционирования самотормозящегося электродвигателя за счет импульсного подведения его к заданной позиции без использования датчиков текущих значений скорости и положения путем is контроля аналога скорости злектродвигателя - выходного напряжения блока 21 моделирования.
Блок 21 моделирования выполнен упрощенным, так как самотормозящийся 20 электродвигатель начинает движение, имея установившийся ток и момент (усилие) , а механич; ское торможение его происходит всегда с одинаковым постоянным замедлением.
Дополнительное повышение точности позиционирования обеспечивается за счет компенсации нестабильности сетевого напряжения нестабильностью источника зарядного тока в блоке 21 30 моделирования и учета реального времени перехода между двигательным и тормозным режимами работы самотормозящегося двигателя.
Формула изобретения
| Линейный электродвигатель | 1981 |
|
SU1020934A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шубенко В.А., Браславский И.Я, Тиристорный асинхронный электропри«вод с фазовым управлением | |||
| - М.: Энергия, 1972, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
