Изобретение относится к измерительной технике, к области бесконтактного контроля положения объектов в пространстве, геодезии.
Цель изобретения - повышение точности измерений расстояния до объекта путем исключения внешней измерительной базы, что в свою очередь исключает погрешности взаимной юстировки объекта и измерительности устройства.
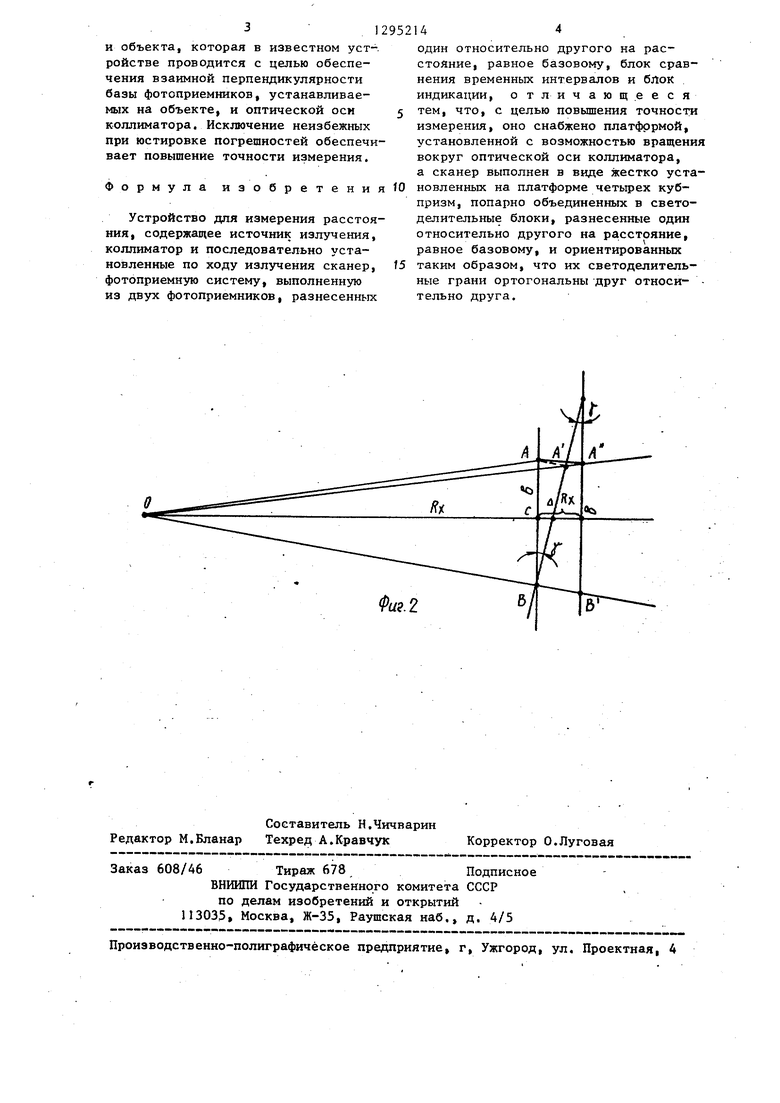
На фиг. 1 изображено устройство и сканер; на фиг. 2 - измерительная схема,
Устройство содержит установленные на общем основании источник излучения, например лазер 1, коллиматор 2, платформу. 3, установленную с возможностью вращения вокруг оси кол- лиЯатора, куб-призмы 4-7, фотоприемник 8, расположенный на объекте, расстояние R до которого измеряется, контрольный фотоприемйик 9, рас- стояние до которого R, известно. Выходы фотоприемников соединены с входом блока 10 сравнения временных интервалов, выход которого соединен с входом блока 11 индикации.
Сканер состоит из куб-призм 4-7 с одинаковыми по величине ребрами. Призма 4 обеспечивает расщепление лазера а призмы 5-7 - отражение яуча. Призмы 4, 5 и 6, 7 объеди - иены в блоки, размещенные на базовом расстоянии чОдин относительно другого.
Устройство работает следующим образом.
;Излучение лазера проходит через коллиматор 2, оптическая ось которого совпадает с осью вращения платформы 3, попадает на куб-призмы 4-7, Куб-призма 4 расщепляет луч на две части, направляя одну из них в сторону куб-призмы 5, а другую - в сторону куб-призмь 6, Куб-призма 5 отражает луч в сторону фотоприемника 8, куб-призма 6 отражает луч на куб-призмы 7s а та, в свою очередь, в сторону фотоприемника 8 таким Образом, что луч, отраженный куб-призмой 7, идет параллельно лучу, отраженному куб-призмой 5. Оба луча, отраженные в сторону фотоприемника 8, вращаются в одной плоскости, параллельной плоскости платформы 3.
Расстояние мелоду призмами 5 и 7
несоответственно, между лучами,на
правленными в сторону фотоприемника 8, является базовым.
Лучи разворачиваются в пространстве расщеплением с угловой скорог стью (О, при этом один из лучей проходит через ось вращения сканера.
При своем движении лучи принимаются фотоприемниками 8 и 9. Сигналы с фотоприемников поступают на вход блока 10 сравнения временных интервалов, после обработки результат представляется блоком 11 индикации в удобной для использования форме.
Искомое расстояние R определяется из формулы
RX
Ь.-. sintot
(1)
где со - скорость вращения базы,
рад/с; .
t - интервал времени между импульсами с фотоприемника 8, расположенного в точке Ф, полученными в результате пересечения его чувствительной площадки сначала лучом ОС, а затем лучом АВ. . При сканировании контрольного фотоприемника 9 лучом ОС и АВ на его выходе возникают два импульса, интервал между которыми t несет информацию о скорости со. В этбм случае формула определения скорости при известных R и b имеет вид
Q - arcsin -- , (2)
а формула для определения контролируемой величины
b
Р - «,-,.- .
sint,/t-arcsinb/Rv
(3)
Таким образом, задача определения расстояния сводится к вычислению отношения временных интервалов t и tj и дальнейшим преобразовани-. ям результата в соответствии с выражением (3). В устройстве сигналы с выходов фотоприемников поступают в блок сравнения временных интервалов 10, после чего в блоке 11 индикации производятся необходимые математические преобразования для представления информации о расстояНИИ R.X в удобной форме.
Использование сканера в качестве измерительной базы позволяет отказаться от предварительной взаимной юстировки измерительного устройства
3 12 и объекта, которая в известном уст-. ройстве проводится с целью обеспечения взаимной перпендикулярности баэы фотоприемников, устанавливаемых на объекте, и оптической оси коллиматора. Исключение неизбежных при юстировке погрешностей обеспечивает повышение точности измерения.
Формула изобретения
Устройство для измерения расстояния, содержащее источник излучения, коллиматор и последовательно установленные по ходу излучения сканер, фотоприемную систему, выполненную из двух фотоприемников, разнесенных
144
один относительно другого на расстояние, равное базовому, блок сравнения временных интервалов и блок индикации, отличающееся тем, что, с целью повышения точности измерения, оно снабжено платформой, установленной с возможностью вращени вокруг оптической оси коллиматора, а сканер выполнен в виде жестко установленных на платформе четьфех куб- призм, попарно объединенных в свето- делительные блоки, разнесенные один относительно другого на расстояние, равное базовому, и ориентированных таким образом, что их светоделитель- ные грани ортогональны друг относи- тельно друга.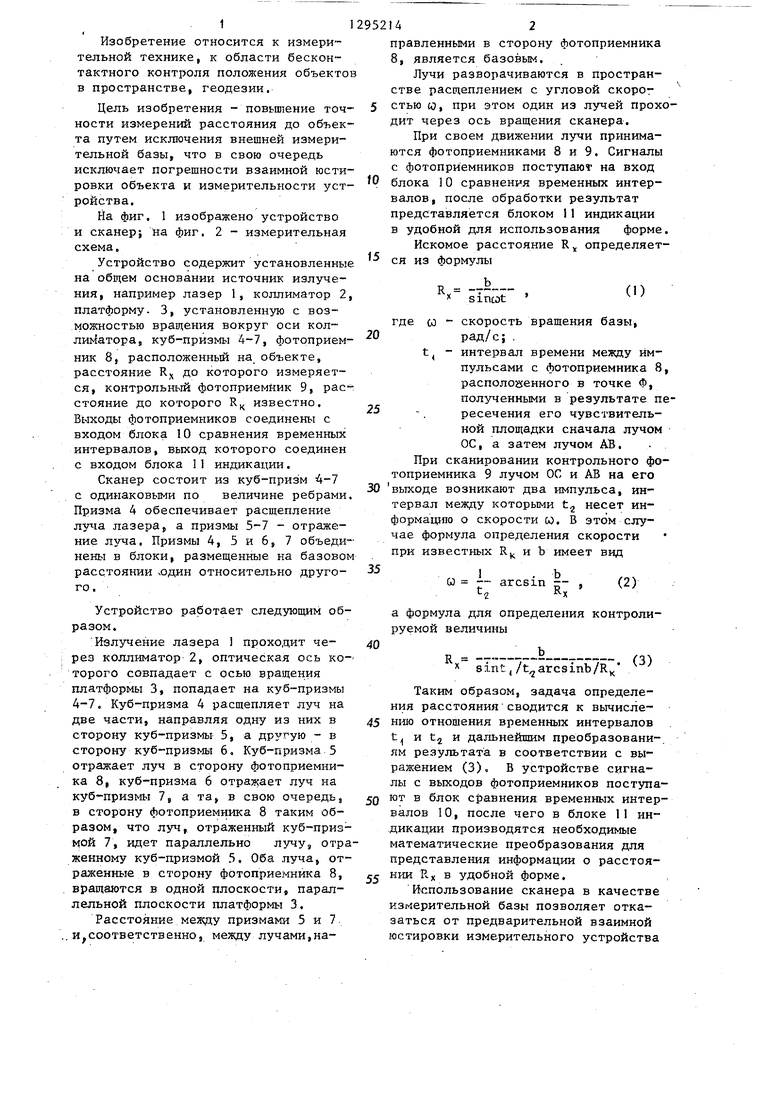
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения расстояний | 1981 |
|
SU954816A1 |
| Способ контроля геометрических параметров колец | 1989 |
|
SU1675664A1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2587686C1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 2020 |
|
RU2745341C1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ НЕПРЯМОЛИНЕЙНОСТИ | 2010 |
|
RU2457434C2 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2146354C1 |
| ОПТОЭЛЕКТРОННЫЙ ДАТЧИК УГЛА | 2004 |
|
RU2320960C2 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО КОНТРОЛЯ ПАРАМЕТРОВ ШЕСТИГРАННОГО ВОЛОКОННО-ОПТИЧЕСКОГО СТЕРЖНЯ ВО ВРЕМЯ ВЫТЯЖКИ | 1992 |
|
RU2020410C1 |
| АКУСТООПТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ СМЕЩЕНИЙ | 2013 |
|
RU2523780C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ БИОЛОГИЧЕСКИХ ПРИМЕНЕНИЙ | 2008 |
|
RU2472165C2 |
Изобретение относится к измерительной технике, в частности к бесконтактному контролю положения объектов в пространстве, геодезии. Целью изобретения является повышение точности измерения расстояний до объекта путем исключения внешней измерительной базы, что в свою очередь исключает погрешности, связанOftexm ные с взаимной юстировкой объекта .и устройства контроля. Сканер, образованный совокупностью четырех куб-призм 4-7, обеспечивает деление излучения на два параллельнь:х пучка за счет объединения куб-призм 4-7 попарно в блоки, разнесенные на расстояние, равное базовому. Куб- призмы 4-7 жестко установлены на платформе 3 и ориентированы так, что их светоделительные грани ортогональны одна относительно другой, а платформа 3 выполнена вращающейся, что обеспечивает сканирование обоими пучками в пространстве. Моменты -времени, в которые пучки попадают на фотоприемники 8, произвольно расположенные на объекте, фиксируются блоком 10 сравнения временных интервалов, и по известной скорости ска1шрования и расстоянию между блоками куб-призм определяют искомое расстояние до объекта, 2 ил. I (Л Фиг.1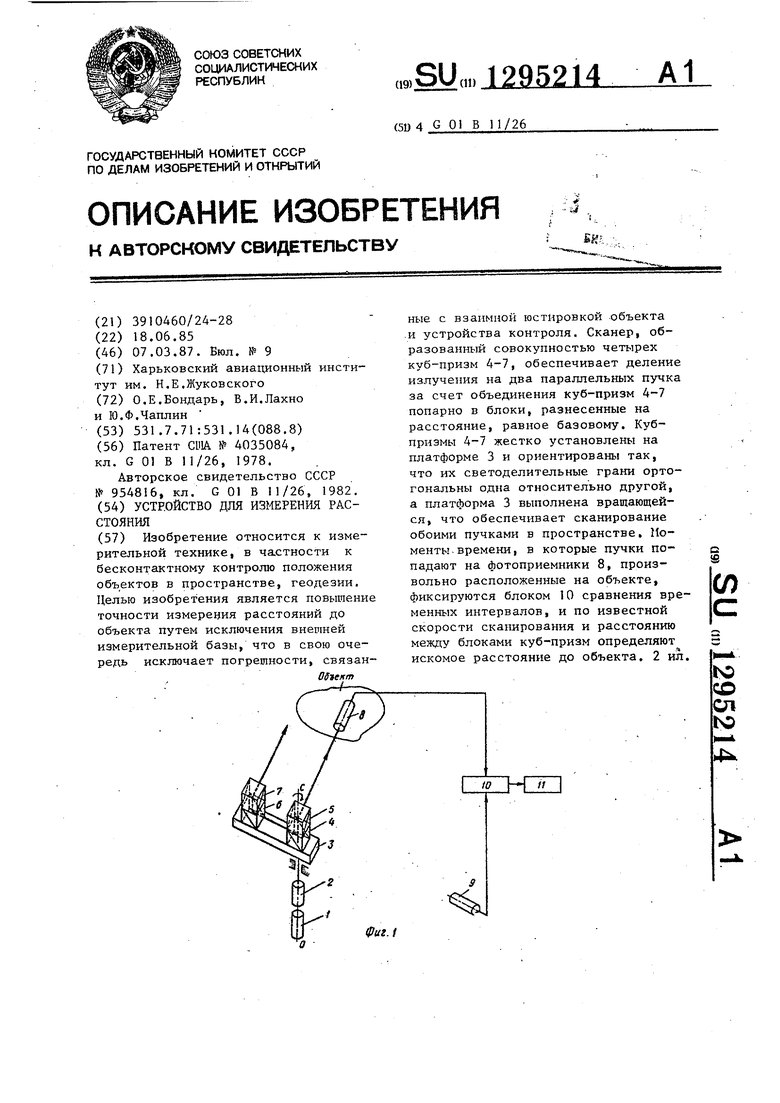
te2
Составитель Н.Чичварин Редактор М.Бланар Техред А.Кравчук
Заказ 608/46 Тираж 678Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор О.Луговая
| Патент США № 4035084, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения расстояний | 1981 |
|
SU954816A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
