, Изобретение относится к оптическому приборостроению и может быть использовано для прецизионного перемещения элементов оптических систем в соответствии с расчетными зависимостями в панкратических системах.
Цель изобретения - повышение, точности перемещения элементов оптической системы, а также уменьшение ее габаритов и веса.
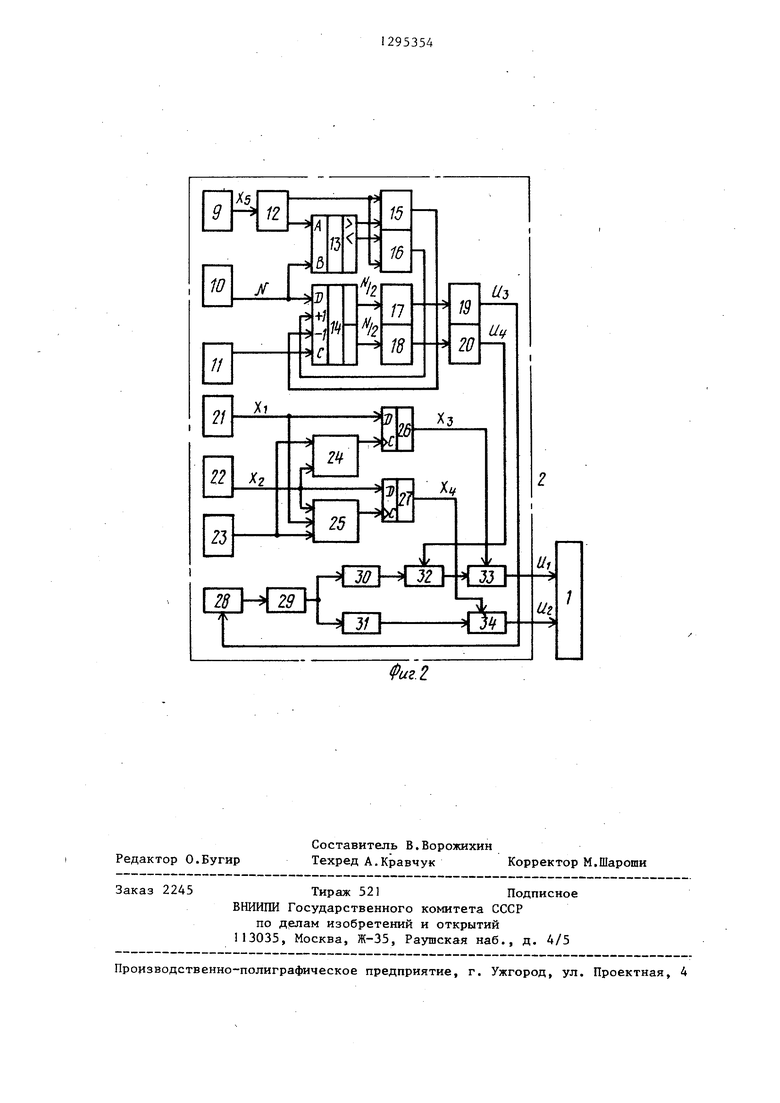
На фиг.1 изображена структурная схема устройства; на фиг.2 - схема блока управления устройства.
Устройство состоит из блока 1 ультразвукового привода и блока 2
управления. i
Блок ультразвукового привода содерчрит два волновода 3, выполненных в виде усеченного конуса и расположенных на одной оси, внутри которых расположена цилиндрическая оправа 4 с оптическими подвижными элементами 5,
К торцам волноводов 3 прикреплены пьезоизлучатели 6 и отражающие накладки 7. В состав устройства входит также неподвижный оптический элемент 8, который может быть установлен как внутри оправы 4, так и вне ее.
Блок 2 управления (фиг.2) содержит датчик 9 перемещения, цифровую клавиатуру 10, кнопку 11, преобразователь 12 перемещение - скорость, на вход которого приходит сигнал от датчика 9 перемещения, а первый выход преобразователя 12 перемещение - скорость соединен с первым входом 13 сравнения, второй вход подключен вместе с выходом цифровой клавиатуры IО к информационному входу счетчика 14. Первый и второй входы схемы 13 сравнения подключены соответственно к второму входу элемента И 15 и первому входу элемента И 16. Первый вход.элемента И 15 и второй вход элемента И 16 соединены с вторым выходом преобразователя перемещение - скорость, а выходы элементов И 15 и 16 соединены соответственно с входом обратного счета и с входом прямого счета счетчика 14, первый и второй выходы которого подключены соответственно ко входам цифроаналоговых преобразователей 17 и 18, выходы которых соединены соответственко с входами усилителей 19 и 20, вход предварительной записи счетчика 14 соединен с кнопкой 11. Блок 2 управления со
5
0
5
0
5
0
5
0
5
держит также концевые выключатели 21 и 22, кнопку 23, элементы ИЛИ 24 и 25, триггеры 26 и 27, причем выход концевого выключателя 21 соединен с информационным входом триггера 26 и первым входом элемента ИЛИ 25, а вход синхронизации триггера 26 соединен с выходом элемента ИЛИ 24, первый вход которого соединен с выходом кнопки 23 и вторым входом элемента ИЛИ 25, третий вход которого соединен с вторым выходом элемента ИЛИ 24, выходом концевого выключателя 23 и информационным входом триггера 27, вход синхронизации которого соединен с выходом элемента ИЛИ 25. Выход усилителя 19 подключен к входу задающего генератора 28, выход которого через предварительный усилитель 29 подключен к входам оконечных усилителей 30 и 31, выход оконечного усилителя 30 подключ ен к первому входу аттенюатора 32, к второму входу которого подключен выход усилителя 20. Выходы аттенюатора 32 и оконечного усилителя 31 соединены соответственно с первыми входами ключей 33 и 34, с вторыми входами которых соединены выходы триггеров 26 и 27 соответственно, а выходы ключей 33 и 34 подключены к блоку 1 ультразвукового привода перемещения .
Устройство работает следующим образом.
С помощью цифровой клавиатуры 10 формируется N-разрядный двоичный код требуемой скорости, который подается на схему 13 сравнения (канал В) и счетчик 14. Код реальной скорости, который подается во второй канал (А) схемы 13 сравнения, формируется преобразователем I2 перемещение - скорость, к входу которого подключен датчик 9 перемещения. Схема 13 сравнения имеет два выхода, А В и , которые подключены к элементам И 15 и 16 соответственно. На оба эти элемента заведен также сигнал Конец преобразования от преобразователя 12 перемещение - скорость. Выходы элементов И 15 и 16 подключены к счетным входам счетчика 14, к входу счета в обратном и входу счета в прямом направлении соответственно. Если коды требуемой скорости и реальной скорости не совпадают, то на одном из выходов схемы 14 сравнения А В или А В присутствует высокий уровень, и сигнал Конец преобразования поступает на один из счетных входов счетчика 16, вызывая изменение кода на его выходе на 1 в сторону увеличения или уменьшения так, чтобы- уменьшить разницу между требуемой и реальной скоростями. Предварительная установка счетчика осуществляется с помощью сигнала, поступающего на его вход записи от кнопки I1. При этом в счетчик записывается код требуемой скорости, поступающий от цифровой клавиатуры 10, Младшие N/2 разрядов кода поступают на цифроаналоговый преобразователь 17, который преобра- зует их в соответствующее напряжение поступающее на усилитель 19, С выхода усилителя сигнал поступает на регулируемый напряжением генератор. Аналогично старшие N/2 разрядов кода счетчика 14 преобразуются цифроанало говым преобразователем 18, и через усилитель 20 сигнал поступает на управляемый напряжением аттенюатор, Сигнал с перестраиваемого напряжени- ем задающего генератора 28 через предварительный усилитель 29 подается на два оконечных усилителя 30 и 31. После оконечного усилителя 30 включен управляемый напряжением ат- тенюатор 32, функцией которого является относительно грубый выбор требуемой скорости перемещения в прямом направлении во всем диапазоне ее изменения. Более точный выбор требуемо скорости осуществляется установкой необходимой частоты генератора. Через ключи 33 и 34 сигнал с аттенюатора поступает на пьезоизлучатели 6 ультразвукового устройства 1 переме- щения.
Пьезоизлучатели 6 ультразвукового устройства перемещения предназначены для преобразования электрического сигнала высокой частоты в продольные механические колебания их поверхности, которые передаются волноводу. Расположение пьезоизлучателей под углом 90° к рабочей части волновода, а также выполнение волновода в виде полой усеченной фигуры, в которой внутренняя образующая волновода .900- тавляет с осью вращения угол меньше, чем внешняя образующая волновода, обуславливает преобразование продоль ных механических колебаний высокой частоты пьезоизлучателей в тангенциальные механические колебания ра
5 О 5 0 5
5
0
бочей части волновода. Такое преобразование возможно благодаря тому, что происходит опаздывание по фазе (времени) прихода механических колебаний продольной волны от единичных площадей пьезоизлучателя к единичным площадям рабочей части волновода, т,е. внешнего участка и внутреннего участка рабочей части волновода, Это создает определенное направление распространения механических колебаний рабочей части волновода от внутреннего к внешнему участку. Таким образом происходит стабилизация фазы тангенциальных колебаний и неп)ерывное тангенциальное колебательное движение в пределах длины рабочей части волновода. Эти тангенциальные колебания (механические), направленные в одну сторону (от внутреннего к внешнему участку), передаются через непосредственный контакт (рабочая часть волновода, поверхность перемещаемого объекта), что вызывает поступательное движение в определенном (одном) направлении перемещаемого объекта. Кроме того, исполнение рабочей части волновода аналогично форме перемещаемого объекта позволяет обеспечить непрерывный контакт поверхности рабочей части волновода с поверхностью перемещаемого объекта, что значительно стабилизирует скорость перемещения, а также тяговое усилие.
Конструктивное выполнение волновода в виде полого усеченного конуса (тела вращения) и перемещаемого узла в виде полого цилиндра обусловлено необходимостью прохождения луча, а также исключает возможность смещения оптической оси оптических компонент одна относительно другой при знакопеременных нагрузках и при максимальном перемещении.
Концевые выключатели 21 и 22 вырабатывают сигнал 1 тогда, когда цилиндрическая оправа 4 находится в начальном или конечном положениях соответственно. С помощью кнопки 23 вырабатывается сигнал Пуск для приведения цилиндрической оправы 4 с подвижными оптическими элементами 5 в движение. В исходном положении (Начало) , , , оба ключа 33 и 34 закрыты. По фронту сигнала Пуск сигналы Х и Х, записываются в триггере 27 и 28 соответст
венно, т.е. Xj , , ключ 33 открыт, цилиндрическая оправа 4 перемещается 3 прямом направлении. При достижении положения Конец становится Х2 1, по фронту этого, сигнала в триггеры 26 и 27 записываются , , ключ 33 закрывается, ключ 34 открывается, цилиндрическая оправа 4 перемещается в обратном направлении. При достижении положения Начало становится X, 1, в триггер 27 записываются Х((0, а , т.е. оба ключа 33 и 34 закрыты, система в исходном положении Начало ожидает следующей команды Пуск. Цикл закончен.
Формула изобретения
1.Устройство для микроперемещения оптических элементов, содержащее оправу оптического элемента, установленную в корпусе с возможностью перемещения относительно него с помощью привода, снабженного блоком управления , отличающееся тем, что, с целью повышения точности и уменьшения веса и габаритов, привод состоит из пьезоэлектрического двигателя, отражающей накладки, размещенной между двигателем и корпусом, и волновода между двигателем и оправой оптического элемента, образующего полый усеченный конус, обращенный меньшим основанием к оправе, и сочлененного с ним с зазором, меньшим величи- ны деформации волновода, плоскость пьезоэлектрического двигателя перпендикулярна оси конуса, причем в устройство введен второй привод, идентичный первому и установленный навстречу ему.
2.Устройство по П.1, отличающееся тем, что блок управления состоит из датчика перемещения преобразователя перемещение - ско- рость, схемы сравнения, счетчика,
двух элементов И, двух цифроаналоговых преобразователей, двух усилителей, двух концевых выключателей, двух элементов ИДИ, двух триггеров, задающего генератора,, предварительного усилителя, двух оконечных усилителей
5
5 0 5
0 5 0
5
0
аттенюатора и двух ключей, причем выход датчика перемещения соединен с входом преобразователя перемещение - скорость первый выход которого соединен с первым входом схемы сравнения, второй вход которой подключен к информационному входу счетчика, второй выход преобразователя перемещение - скорость подключен к первому входу второго элемента И, а первый и второй выходы схемы сравнения соединены соответственно с вторым и первым входами первого и второго элементов И, выход первого элемента И соединен с входом обратного счета счетчика, вход прямого счета которого подключен к выходу второго элемента И, первый и второй выходы счетчика подключены соответственно к входам первого и второго цифроаналоговых преобразователей, выходы которых соединены с входами первого и второго усилителей, выход первого концевого вьпслючателя соединен с информационным входом первого триггера и первым входом второго элемента ИЛИ, а вход синхронизации первого триггера соединен с выходом первого элемента и вторым входом второго элемента. ИЛИ, третий вход которого соединен с вторым входом первого элемента ИЛИ, выходом второго концевого выключателя и информационным входом второго триггера, вход синхронизации которого соединен с выходом второго элемента ИЛИ, выход первого усилителя подключен к входу задающего генератора выход которого через предварительный усилитель подключен к входам первого и второго оконечных усилителей, выход первого оконечного усилителя подключен к первому входу аттенюатора, к второму входу которого подключен выход второго усилителя,.выходы аттенюатора и второго оконечного усилителя соединены соответственно с первыми входами первого и второго ключей, с втерыйи входами которых соединены выходы первого и второго триггеров, а вьрсоды первого и второго ключей подключены к ультразвуковому устройству перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ РАСПРОСТРАНЕНИЯ УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ | 1966 |
|
SU211133A1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1997 |
|
RU2124703C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ОЧИСТКИ | 2000 |
|
RU2184625C2 |
| Устройство для увлажнения кожи | 1990 |
|
SU1772164A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНЫХ УРОВНЕЙ ПОБОЧНЫХ КОЛЕБАНИЙ РАДИОПЕРЕДАТЧИКОВ | 1990 |
|
RU2033618C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| Ультразвуковой интерферометр | 1976 |
|
SU649999A1 |
| Устройство для автоматической фокусировки объектива видеокамеры | 1988 |
|
SU1670664A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАТЕРИАЛОВ | 1996 |
|
RU2109272C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО | 1992 |
|
RU2045239C1 |
Изобретение может быть использовано для прецизионного перемещения элементов оптических систем в соответствии с расчетными зависимостями в панкратических системах. Цель изобретения - повьшение точности устройства и уменьшение его массы и габаритов. Перемещение установленных в цилиндрической оправе 4 оптических элементов 5 осуществляется с помощью пьезоэлектрических двигателей, преобразующих электрические сигналы высокой частоты блока 2 управления в продольные механические колебания, передаваемые волноводам 3. Выполнение волноводов 3 в виде пологе усеченного конуса, ось которого перпендикулярна плоскости пьезоэлектрического двигателя 6, обеспечивает определенное направление распространения механических колебаний рабочей части волновода 3 от меньшего основания его к большему, что вызывает поступательное движение перемещаемых оптических элементов в одном направлении. Форма волноводов 3 и оправы 4 исключает смещение оптических осей элементов 5 относительно друг друга при знакопеременных нагрузках и максимальиом перемещении. Приведена блок-схема блока 2 управления устройства. 1 з.п. ф-лы, 2 ил. ф С/) J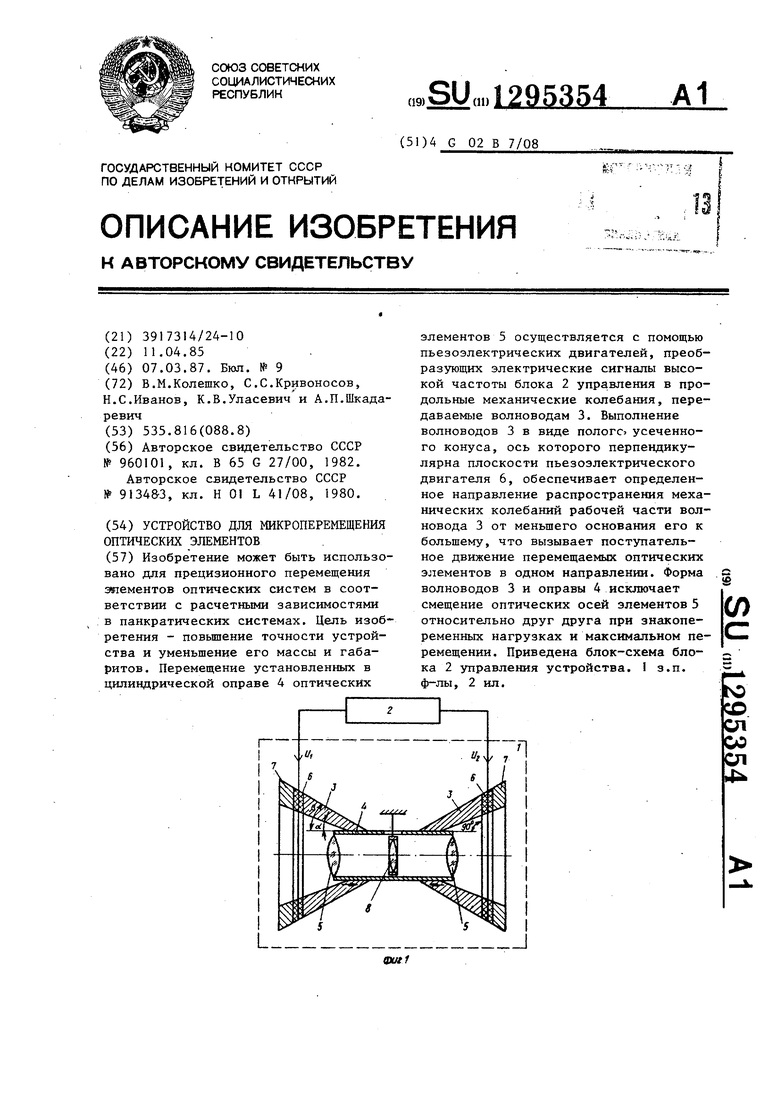
Редактор О.Бугир
Составитель В.Ворожихин
Техред А.Кравчук Корректор М.Шароши
Заказ 2245Тираж 521Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
™ - - - ™---- - -- --.--------..- .... «. .i..
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для перемещения изделий | 1980 |
|
SU960101A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Электромагнитный тахометр | 1928 |
|
SU9134A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
