Изобретение относится к управлению движением .горных машин, проходческих щитов и т.п., а именно к системам, контроля положения движущегося объекта относительно направления, за- данного световым, лучом.
Цель изобретения - ynpomei-rae и ускорение процесса контроля при нии объекта на криволинейных участках
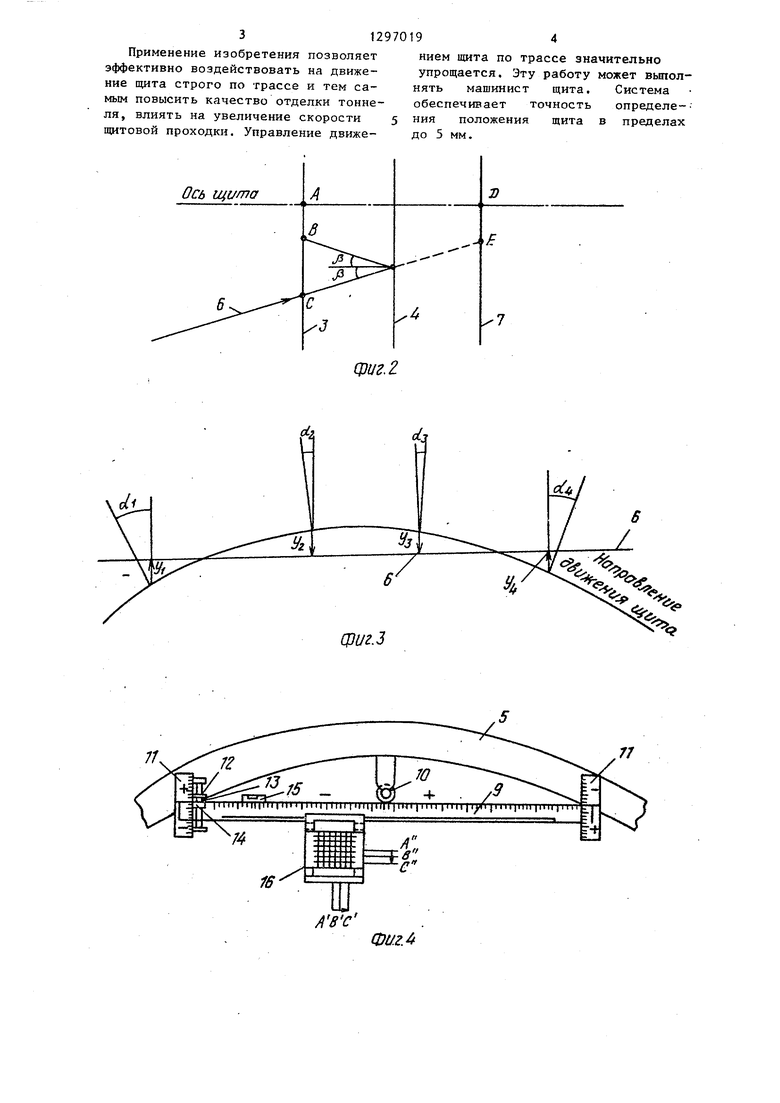
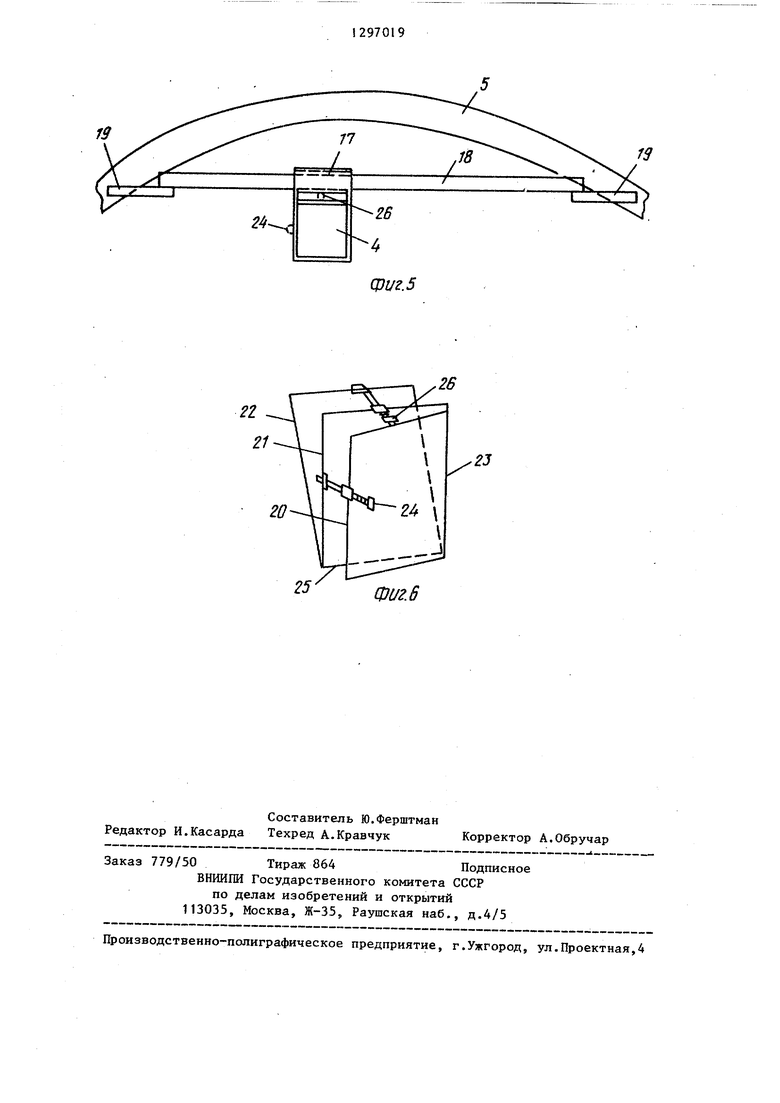
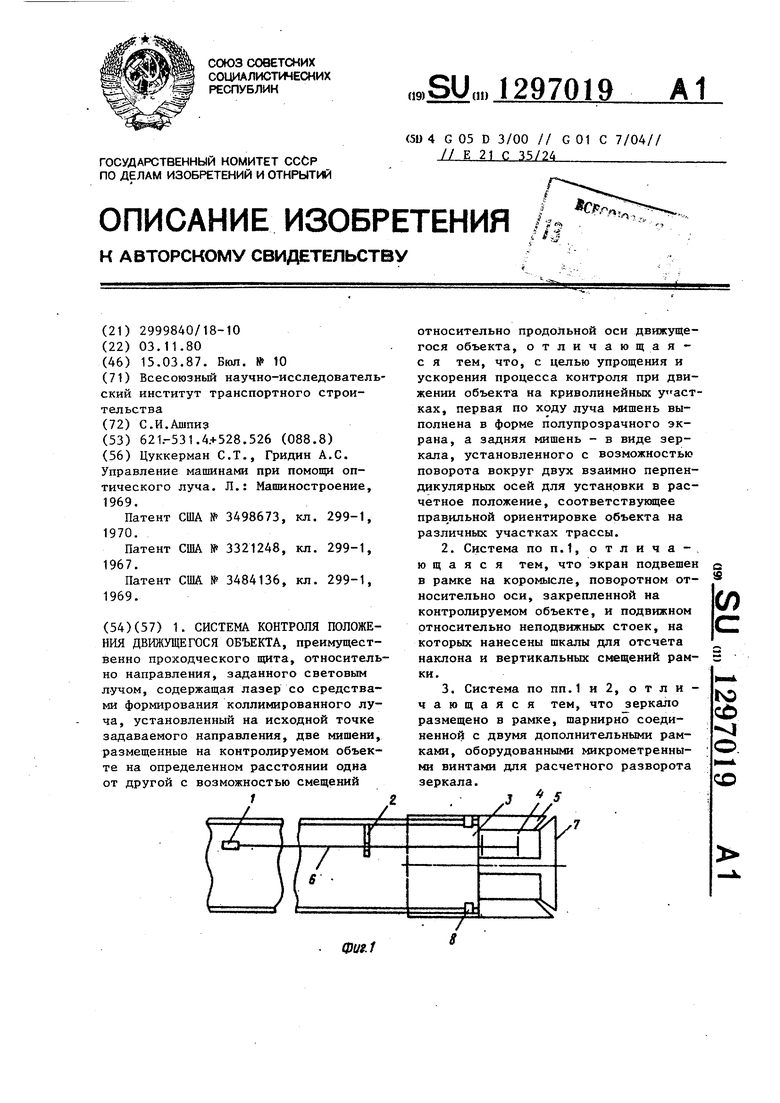
На фиг. 1 представлена принципи- альная схема построения предлагаемой системы; на фиг. 2 - геометрическая схема контроля положения; на фиг.З схема, иллюстрирующая принцип расчета номинального положения мишеней; на фиг. 4 - механизм рёгулироззки положения экрана; на фиг, 5 - узел крепления зеркала на, нщте; на фиг, 6 - приспособление для регулировки поло- лсения зеркала.
Система состоит из лазера 1 и диафрагмы 2, ориентированных в тоннеле по заданному направлению, а также из полупрозрачного экрана 3 и зеркала 4, закрепленных на корпусе 5 проходчес- кого щита по его оси или параллельной ей линии.КоллимкнирОБанный узкий пучок 6 лазера, пройдя через отверстие диафрагмы, оставляет на экране 3 световое пятно С. Луч, попадая на зеркало 4, дает на экране вторичное световое пятно В. При условии, что отражатель находится посередине между зкраном и ножом щита 7, величина ЛВ показывает отклонение ножа, так как АВ DE. По взаимному распололсению световых пятен на экране 3 принимается решение по соответствующем включению пд1тозых домкратов 8 для изменения или сохранения направления оси щита при его движении. Показанное на экране положение тцита характеризуется отклонениями ножа В А , В А и развороташ оси OTHocnTej ibHO проектного направления С В , С В , соот- ветственно в плане и профиле (фиг.4)
Подвеска экрана состоит из коро- мыспа 9, которое может вращаться по оси 10, скрепленной с корпусом 5, и скользить по стойкам 11, прикреплен- ным к корпусу 5. Со стойкой 11 соединен винт. 12, проходян ий через проушину 13, прикрепленную к коромыслу 9. Гайками 14 коромысло 9 приводится в горизонтальное положение по пока- занию уровня 15 и закрепляется. Для исключения влияния крена на определение положения щита, на стойках 11
наносится шкала с ценой деления, равной отношению половины длины коромысла к его превышению ЕШД центром гцита.
В верхней части коромысла крепится линейка с метрическим делениями, на которой начало отсчета посередине а нумерация делений увеличивается от О влево и вправо. На прямолинейном участке трассы по отсчету ребра коромысла на делениях стойки 1 1 (крене) передвигается рамка 1б на равньй отсчет, но уже в метрических делениях; при плюсовых отсчетах на стойке вправо, при минусовых - влево. На криволинейных участках трассы принимается во внимание величина Y смещения щита относительно пучка 6. В этом случае индекс рамки 16 устанавливается на отсчет, равный алгебраической сумме величин крена и Y . При прохождении вертикальных кривых экран 3 перемещается в рамке 16 на величину V по высоте.
Для удобства зеркало 4 и рамка 16 экрана являются съемными. Они входят в пазы каретки 17, которая молсет перемещаться по направляющей 18 до попадания на зеркало луча лазера. При монтаже устройства положение направляющей 18 юстируется и затем она скрепляется с подкладками 19, приваренными к корпусу щита 5.
Узел отражателя состоит из трех шарнирно соединенных рамок 20-22. .. Рамки 20 и 21 имеют только контурные стержни. В рамке 22 вставлено зеркало 4. Рамка 21 вращается относительно рамки 20 по вертикально расположенному шарниру 23 с помощью микрометра 24. Рамка 22 вращается относительно рамки 21 по горизонтально расположенному щарниру 25 с помощью микрометра 26.
Микрометры с точностью до установки в 0,01 мм при ширине рамки 200 и высоте 300 мм обеспечивают необходимую точность определения положения пщта. Установка отсчета микрометров производится согласно величин и направляющей углов оС,- . Все установочные опера1щи как для зеркала, так и для экрана производятся до начала продвижения пр-1та по табличным данным составленным на основании предварительных расчетов для всего сооружаемого участка трассы.
Применение изобретения позволяет эффективно воздействовать на движение щита строго по трассе и тем самым повысить качество отделки тоннеля, влиять на увеличение скорости щитовой проходки. Управление движением щита по трассе значительно упрощается. Эту работу может выполнять машинист щита. Система обеспечивает точность определения положения щита в пределах до 5 мм.
ffCA щита
f
фиг. 2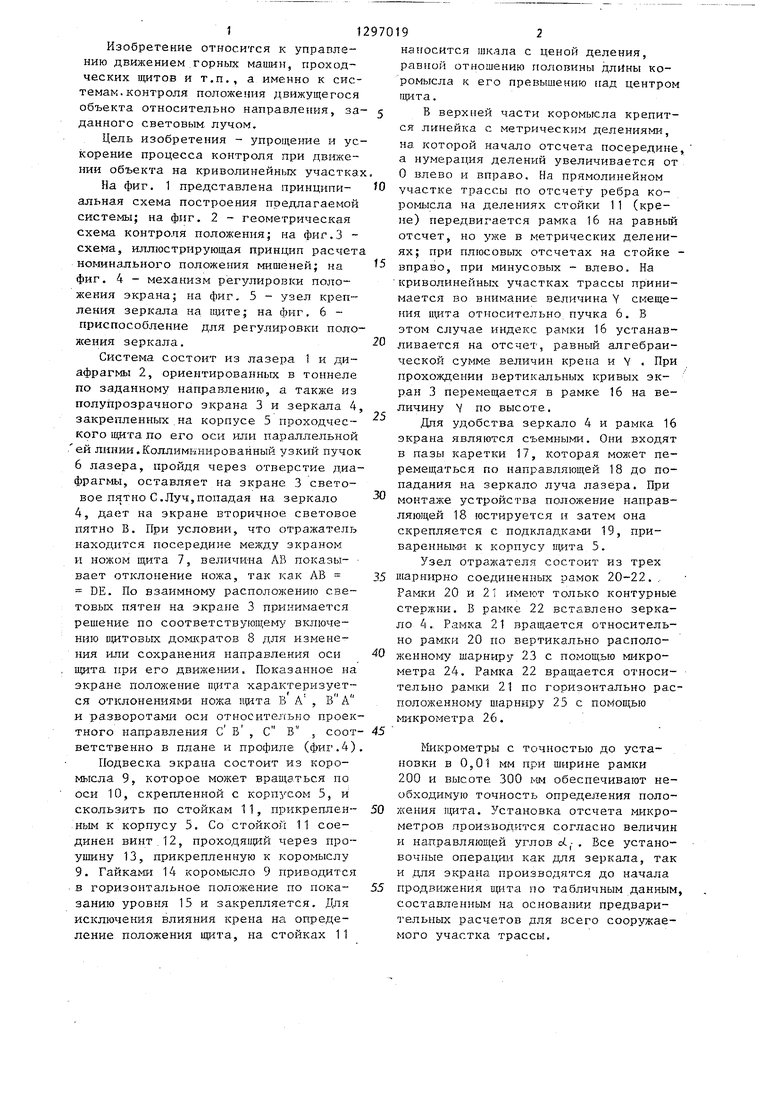
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДЕЛЬ ОСВЕТИТЕЛЬНОЙ СИСТЕМЫ АЭРОДРОМА ДЛЯ ОБУЧЕНИЯ ПОСАДКЕ | 1992 |
|
RU2042981C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2001 |
|
RU2204821C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2000 |
|
RU2179789C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Устройство для управления машиной на круговых кривых | 1977 |
|
SU741050A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033602C1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| ОПТИЧЕСКИЙ СТЕНД ДЛЯ КОНТРОЛЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034261C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| ВИЗУАЛИЗАТОР ПЛОТНОСТНЫХ НЕОДНОРОДНОСТЕЙ СРЕДЫ | 2007 |
|
RU2344409C1 |
фиг.З
;/
/
77
.г.
19
77
.18
фиг. 5
Фиг. 6
| Цуккерман С.Т., Гридин А.С | |||
| Управление машинами при помощи оптического луча | |||
| Л.: Машиностроение, 1969 | |||
| Патент США № 3498673, кл | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
| Патент США № 3321248, кл | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
| Патент США № 3484136, кл | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
