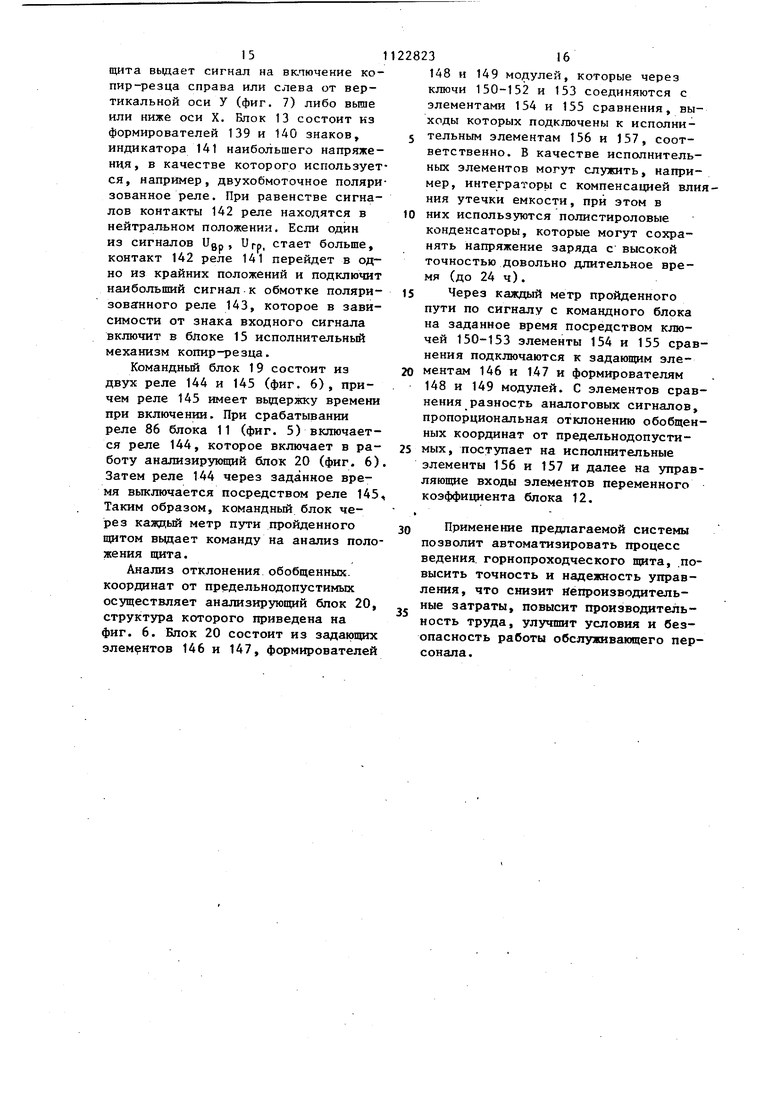
Изобретение относится к горной промьшленности, а именно к автоматическому управлению проходческими щитами, проходческими комбайнами и др. Известно устройство для автоматического контроля положения горнопроходческой машины, содержащее оптический задатчик направления, полудисковьй модулятор и фотоприем.нов устройство с объективом, установленное на машине fll . Такое устройство не обеспечивает управление щитом на криволинейных участках движения. Известна система автоматического управления движением проходческого гцита, содержащая установленное за 1ДИТОМ лазерное устройство, фотоэлектрическое, приемное и индикатор пса устройства, смонтированные на Ш . Однако система не применима для криволинейных трасс, не предусмотрено в системеЛхравлениекопир-рез цом и элеронами, что крайне необходимо при проходке кривоогтинейнЫх тоннелей. Коэффициент передачи системы не изменяется с изменением гор но-геологических условий работы Щ11та, степени затупления резцов, скорости подачи и др. факторов. Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является система ав томатического ведения горнопроходческого щита, содержащая оптический задатчи с направления, зеркальную отклоняющую призму с приводом и бло ком управления приводом, матрицы с фотоэлементами, связанными с измерительным блоком, логический блок, блок измерения пройденного расстояния и управляющий блок 3J. К недостаткам известной системы относятся недостаточная точность и надежность управления движением горной машины в связи с тем, что система не обеспечивает контропь крена щита, что вносит ошибку в измерения координат в горизонтальной и вертикальной плоскостях и не позволяет управлять щитом с помощью элеронов в плоскости крена. Не предусмотрено в системе и управление копир-резцом, что необходимо для выведения щита на проектную ось при больших отклонениях и при работе на криволинейных участках трассы 23 . 2 не производится анализ управляемости щита и изменение коэффициента передачи системы автоматического падения с изменением горно-геологичес1ШХ условий работы, степени затупления резцов, скорости подачи и др. факторов. Цель изобретения - повышение точности и надежности ведения горнопроходческого щита. Поставленная цель достигается тем, что система автоматического ведения горнопроходческого щита, содержащая последовательно соединенные оптический задатчик направления (например, лазер), диафрагму, матрИ15 1 с фотоэлементами, связанные с блоком измерения координат отрезка, параллельного оси щита, блок измерения пройденного расстояния, связанНьй через блок определения поправок с блоком отклонения луча, установленньм между задатчиком направления и / диафрагмой, исполнительные механизМЬ1 домкратов, копир-резца и элеронов, снабжена блоком вычисления координат ножа и хвоста щита, блоком вьфаботки управляющего воздействия, блоком управления домкратами, блоком управления копир-резцом, командным блоком, анализирующим блоком, блоком контроля крена, блоком управления элеронами, причем выход блока контроля крена соединен с входом блока управления элеронами и с первым входом блока вычисления координат ножа и хвоста щита, выход которого соединен с входом блока вьфаботки управляющего воздействия, первый выход которого соединен параллельно с первыми входаьш блоков управления домкратами и копир-резцом, а второй ВЕлход подключен к первому входу анализирующего блока, выход которого соединен с вторым входом блока управления домкратами, второй выход блока измерения пройденного расстояния подключен к входу командного блока, выход которого соединен с вторым входом анализирующего блока, при этом выход блока измерения координат отрезка, параллельного оси щита, подключен к второму входу блока вычисления координат ножа и хвоста щита, второй выход блока определения поправок соединен с третьим входом блока вычисления ко ординат ножа и хвоста щита, а выхоДы блоков зтравления домкратами. копир-резцом и элеронами подключен к соответс.вующим исполнительным механизмам щита. На фиг. 1 изображена принципиал ная схема системы на фиг. 2-6 функциональное выполнение блоков J на фиг. 7-9 - графические схемы, иллюстрирующие работу устройства. Система состоит из оптического задатчика направления - лазера 1 , луч которого проходит через блок отклонения луча 2, диафрагму 3 и п тупает на матрицы 4 и 5 с фотоэлементами, связанными с блоком 6 измерения координат отрезка, параллельного оси щита, выход которого связан к блоком 7 вычисления координат ножа и хвоста щита, остальны входы которого соединены с выходом блока 8 контроля крена, а выход подключен к блоку 9 вьфаботки управляющего воздействия. Вход блока 10 определения поправок связан с блоком 11 измерения пройденного расстояния, а первый выход - с уст ройством 2 отклонения луча. Вьйсод блока 9 выработки управляющего воздействия соединен с бло ком 12 управления домкратами, блоком 13 управления копир-резцом, выходы которых подключены к исполнительным механизмам 14 гидродомк. ратом и копир-резца 15 щита 16. Ис полнительный механизм 17 элеронов подключен к выходу блока 18 управления, вход которого соединен с блоком 8 контроля крена. В состав устройства также входит командный блок 19, вход которого связан с блоком 11 измерения пройденного расстояния, а выход - с вторым вхо дом анализирующего блока 20, первый вход которого соединен с блоко 9 выработки управляющего воздействия, а выход - с блоком 12 управле ния домкратами. На фиг. 2 показано расположение основных блоков системы в тоннеле и на щите. Лазер 1, устройство 2 отклонения луча и диафрагма 3 устанавлива ются в тоннеле, а все остальные ,бл ки - на щите. С помощью луча лазер задается направление движения щита Слежение за лучом и измерение поло жения щита в плане и профиле осуществляется следящей измерительной системой, состоящей из матрицы 4 и 5 с фотоэлементами и блока 6 измерения координат отрезка, параллель ного оси щита. Конструкция щита не позволяет установить матрицы 4 и 5 в ножевой и хвостовой точках продольной оси щита, поэтому они смещены параллельно его оси и сдвинуты от крайних точек щита к его середине. Поэтому на выходе блока 6 получаются сигналы, пропорциональные величине смещения отрезка, расположенного параллельно оси щита. Система работает следующим об.разом. Измерение угла крена щита осуществляется блоком 8 контроля крена. Вычисление координат ножа и хвоста щита с учетом его крена и . поправок при движении щита на криво линейных участках производится блоком 7. С блока вычисления координат сигнал постудает в блок 9 вьфаботки управляющего воздействия, в котором в соответствии с заданным алгоритмом управления по координатам ножа и хвоста щита определяется управляющее воздействие. В блоке 12 управления домкратами в соответствии с величиной управляющего воздейст- ВИЯ определяются номера домкратов, которые необходимо включить для передвижки щита по трассе. Сигналы этого блока включают исполнительные механизмы 14 гидродомкратов. Одностороннее ущирение вьфаботки, необходимое для введения щита на проектную ось при больших отклонениях и при работе на криволинейных участках трассьг, осуществляется с помощью копир-резца. Точки начала и окончания резания копир-резца определяются блоком 13 управления, сигнал с которого поступает на исполнительный механизм 15. Управление щитом в плоскости крена производится с помощью элеронов, исполнительный механизм которых получает сигнал с блока 18 управления элеронами. В блоке 18 в соответствии с величиной и знаком угла крена вычисляется величина вьздвижения элеронов. Измерение расстояния, пройденного щитом, осуществляется блоком 11, сигнал которого поступает в коандный блок 19 и в блок 10 опрееления поправок. При работе на криволинейном участке трассы в функции пройденного расстояния производится отклонение луча в плане
5 . посредством блока 2, сигнал на который поступает с блока 10 определения поправок, связанного с блоком
7вычисления координат ножа и хвоста щита с целью внесения поправки
в профиль и в координаты хвоста в плане.
Через каждый метр пройденного щитом расстояния сигналом, поступающим из блока 11 измерения пройденного расстояния, включается командньй блок 19, который включает анализирующий блок 20. В анализирующем блоке 20 действительное отклонение щита сравнивается с предельно допустимым. И если отклонение действительных координат от заданных значительно, то из анализирующего блока сигнал поступает на элемент переменного коэффициента блока 12 управления домкратами.
8результате изменяется коэффициент перадачи блока 12, а следовательно, количество и номера включаемых домкратов проходческого щита.
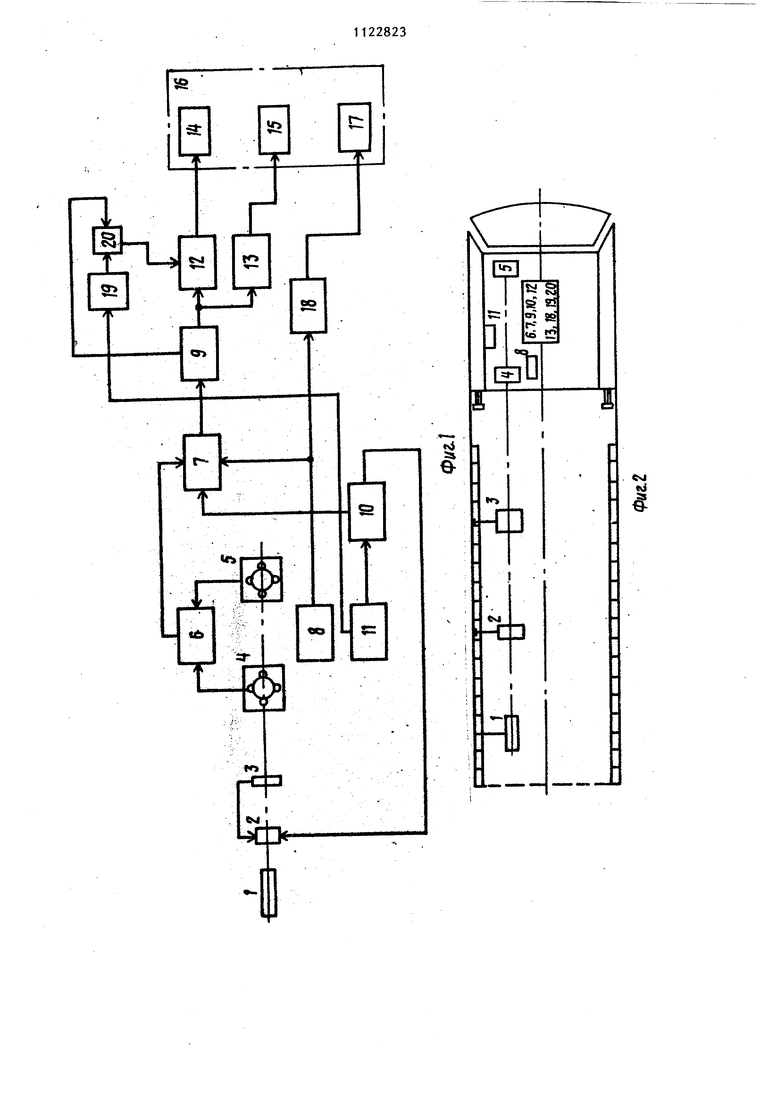
Блок 2 отклонения луча (фиг. 3) состоит из зеркальной призмы 21, связанной через редуктор 22 с электродвигателем 23, соединенным через усилитель 24 с устройством 25 сравнения, на которое поступают анапоговые сигналы с блоков 3 и 10. С блока 10 поступает сигнал, пропорциональный требуемому углу поворота луча, а с блока 3 - сигнал, пропорциональньй действительному углу поворота луча. При повороте призмы на требуемый угол сигналы на входе устройства сравнения равны по величине и противоположны по знаку, поэтому на выходе устройства сравнения сигнал равен нулю и привод отключается. Диафрагма 3 (фиг. 3) состоит из основания 26, на котором установлена матрица 27 с отверстием 28 и двумя фотоэлементами 29,- связанными через усилители 30 и 31 напряжения с устройством 32 сравнения, которое через усилитель 33 мощности подключено к электродвигателю 34. Электродвигатель со динен через винтовую передачу 35 с матрицей 27 и датчиком 36 перемещени который через усилитель 37 соединен с устройством 25 сравнения блока 2.
Структура следящей измерительной систеь1ы, состоящей из матриц 4 и 5 с фотоэлементами и блока измерения координат oTpesKJa, параллельного
22823б
оси щита, приведена на фиг. 3. Мат-рица с четырьмя фотоэлементами 37, расположенными друг от друга на расстоянии равном диаметру луча, 5 соединена через вертикальную винтовую передачу 38 с электродвигателем 39 и подвижной катушкой датчика 40 измерения перемещения.
В горизонтальной плоскости фото10 элементы перемещаются посредством
винтовой передачи 41 электродвигателем 42, который одновременно перемещает подвижную катушку датчику 43. Сигналы с фотоэлементов через уси15 лители 44, устройства 45 сравнения и усилители 46 мощности подаются на электродвигатели.
Если имеет место отклонение .щита, а следовательно, и следящей из20 мерительной системы, то оказьюаются засвеченными не все фотоэлементы.
Сигнал рассогласования через электродвигатель и винтовую передачу вьгоодит матрицу с фотоэлементами
25 на луч таким образом, чтобы все фо-. тоэлементы были освещены одинаково. Пройденный матрицей путь, определяемый отклонениемточки щита, в которой закреплено приемное устройство,
3Q измеряется датчиками 40 и 43. Аналоговые сигналы X(3j(g и У,/ с датчиков через усилители 47 и 48 поступают в блок 7. Поскольку луч может свободно проходить через отверстие матрицы, то он используется для измерения аналогичным образом двух координат Xgj, и УО„ второй точки отрезка, параллельного оси щита, с помощью матрицы 5.
Измерение угла крена щита осуществляется блоком В контроля крена (фиг. 4), представляющим собой следящую измерительную систему. В качестве чувствительного элемента в блоке используется электролитический датчик 49, который с резисторами 50 и 51 образует мост. Датчик 49 устанавливается в горизонтальное положение с помощью винта 52, при этом мост сбалансирован и разность потенциалов в диагонали моста равна нулю.
При крене щита нарушается равновесие моста и сигнал поступает через усилитель 53 на управляющую обмотку электродвигателя 54, KOTopbtfi
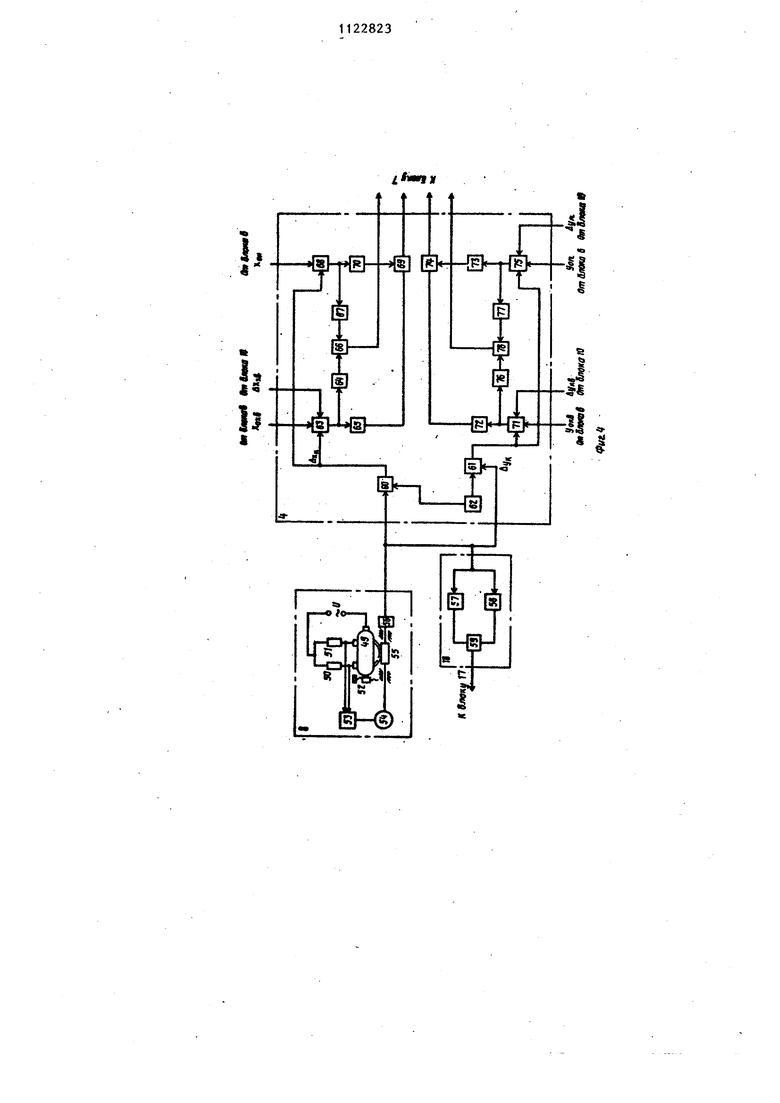
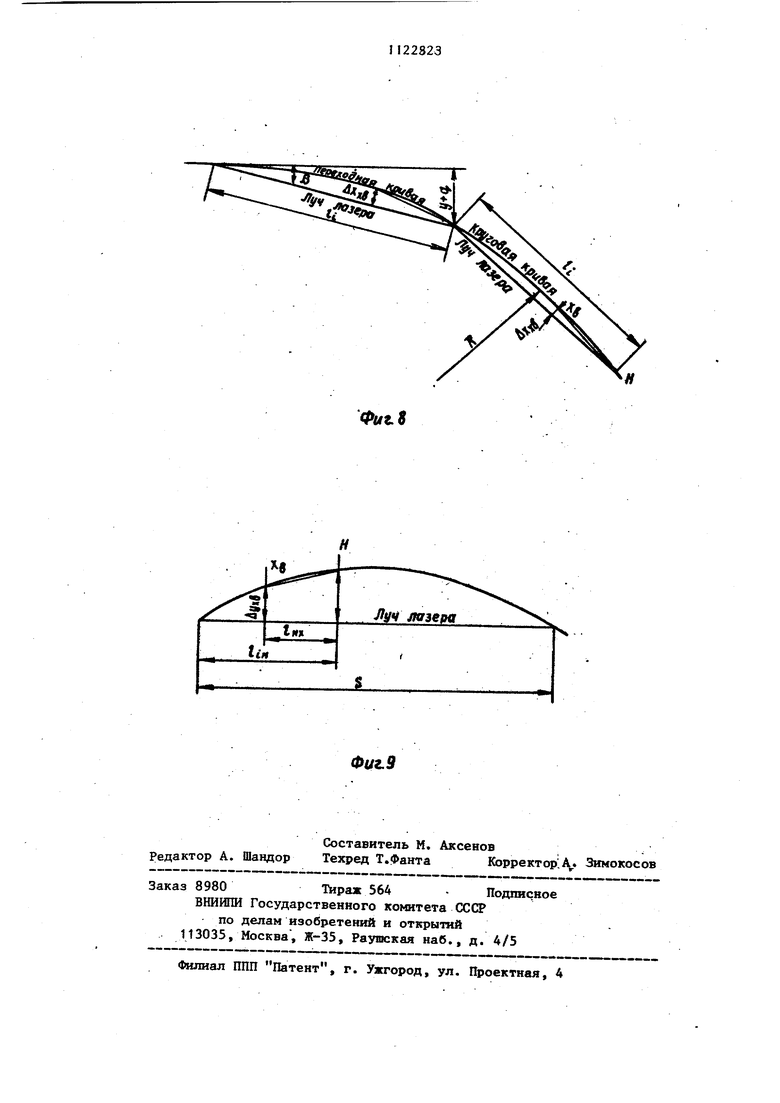
через редуктор 55 перемещает датчик в . горизонтальное положение .. Как только датчик займет горизонтальное положение , двигатель остано вится . Величина поворота,вала редуктора пропорциональная углу крена, преобразуется в электрический сигнал индуктивным датчиком 56. Таким образом, на выходе блока 8 получаете аналоговый электрический сигнал, пропорциональный углу крена (f . Следящая система в блоке контроля крена использована с целью увеличения линейной части характеристики датчика. С блока контроля крена сигнал поступает в блок 7 с целью введения поправок в координаты щита и в блок 18 управления элеро:нами. Блок 18 (фиг. 4) состсмнт из усилителя 57, дифференцирующего элемента 58 и сумматора 59. Величина вьздвижения элеронов, таким образом пропорциональна углу крена щита и его производной. Блок 7, структура которого приведена на фиг. 4, вычисляет координаты ножа Х и хвоста Xjg , ЩИта по известньм формулам. . . н л он 2о)5 Кх6 К.-)(охЬ 4 Он ; YH -jYoxb ) , Rj, УОХ|-К.-УОЦ , где К,|, К, К и К( - постоянные к эффициенты , равные K.-ltl.K,. K. . b{ .5 4 где Е, - расстояние мезвду ножевой матрицей и ножевой точкой щита, расстояние мелзду ножевой и хвостовой матрицами, расстояние меяду хвостово матрицей и хвостовой точкой щита. Координаты точки установки на щите ножевой матрицы Х... в горизон тальной плоскости и У, В вертикал ной плоскости равны он-Л lc; ДУ.ЛЧ„, где Х, Ур - координаты, измерен ные ножевой матрице Ь Х|, U У - поправки на крен щи та в горизонтальной ЛХ, ДУ, и вертикальной плос костях соответствен но f л Уц - поправка при проходке тоннелей криволинейных и вертикальной плоскости. Координаты точки установки на ите хвостовой матрицы - в гоизонтальной плоскости, УОЛР - в ертикальной плоскости равны ох& охе.±ДХк ЛХхь; ox -Yoxft AYK aV b, координаты измеренные хвостовой матрицей;поправка при проходке тоннелей кри- волинейных в горизонтальной ппоскости;. ьУхв поправка при проход-. ке тоннелей криволинейных в вертикальной плоскости. Величина поправок i Xj, и 4Уц определяется по формулам ДХ fti-sinqi - в горизонталь ной плоскости ЬУ jU-(1-cos (f ) - в вертикальной плоскости, Ц - расстояние от оси щита до места установки матриц (фиг. 7). Для получения поправок Х и t УН используются функциональные преобразователи 60 и 61, а постоянная величина /И поступает из задатчика 62. Одновременно в блок 7 (фиг. 4) поступают сигналы, пропорциональные координатам которые откладьтаются в сумматоре 63 и далее подаются на входы операционных усилителей 64 и 65, где производится умножение входных сигналов на постоянные коэффициенты. С выхода усилителя 64 сигнал поступает на вход сумматора 66, на второй вход которого ччерез. операционный усилитель 76 с сумматора 68 подается сигнал, пропорциональный сумме координат Х и ЛХ. На выходе блока 66 получаем сигнал, пропорциональный координате Х. С выхода усилителя 65 поступает сигнал на вход сумматора 69, на второй вход которого через операционный усилитель 70 поступает сигнал, пропорциональный сумме координат Х),ци
& Xj;. На выходе блока 69 получаем сигнал, пропорциональный Хц . Аналогично получаем координаты Улв и Уц. Для получения координаты -используются сумматоры 71 и 75, операционные усилители 72 и 73, сумматор 74. Для пояучения координаты У используются сумматоры 71. и 75, операционные усилители 76 и 77, сумматор 78,
Блок 11 измерения пройденного расстояния, структура которого приведена на фиг. 5, снабжен индуктивным датчиком 79, подвижная катушка 80 которого связана с штоком механизма 81 перемещения с приводом 82 посредством электромагнитного механизма 83 расцепления, управляемого сигналом датчика 84 начала движения и соединяющего жестко подвижную катушку 80 с механизмом ее перемещения только на время движения щита, что исключает накопление ошибки за счет холостого хода штока механизма 81 перемещения и деформации крена тоннеля. Кроме того, блок 11 включает выпрямитель 85 и реле 86, соединенное через счетчик 87 с сумматором 88 пройденного расстояния.
В качестве механизма 81 перемещения можно использовать винтовой или гидравлический домкрат с ходом щтока более 1 м, так как для установки одного кольца крепи тоннеля щит должет переместиться на 1 м. Головка штока механизма перемещения упирается в торцовую часть обделки тоннеля. Сигнал индуктивного датчика 79, пропорциональный величине перемещения щита, поступает на вьшрямитель 85 и реле 86, которое включается при перемещении щита на 1 м. Счетчик 87 отЬчитьшает в метрах расстояние, пройденное щитом, которое в сумматоре 88 складывается с расстоянием в миллиметрах (сантиметрах) , поступакяцим с датчика через выпрямитель 85. Таким образом, в процессе циклической передвижки щита с требуемой точностью определяется пройденное им расстояние.
Сигнал с сумматора 88 блока 11 поступает на вход блока Ю определения поправок.
Блок 10 имеет три режима работы; проходка переходной кривой, проходка круговой кривой, проходка вертикальной кривой.
122823 0
Выбор режима осуществляется переключателем 103 и выключателем 104. Если идет режим проходки на переходной кривой, переключатель 5 .103 устанавливается в положение 1, проходка круговой кривой - в положение II, проходка вертикальной кривой - замыкается выключатель 104
При проходке переходной кривой 10 осуществляется поворот луча и введение поправки в координаты хвостовой точки. По известным формулам, используемым при производстве маркшейдерских работ, угол поворота лу15 ча определятся следующим образом
р. $гР. ±l- п
66 ь ; 1
р;-В:. 6СГДля углов 3 3°, что имеет при прохождении переходной можно записать
. Ь.1
бс ь
где В - расстояние от начала кривой до-ножевой матрицы поступает из блока 1; С - параметр переходной кривой; i q . - смещение оси тоннеля от
оси пути;
L - линa переходной кривой. Поправка U в координату, из5 меренную хврстовой матрицей 4
(фиг. 2), определяется (фиг. 8) по формуле
, 1 i AX,6 e.,-- -.-j;
,,
при углах 5 З tg в 5: /3 , тогда
АХ . /ft-liiliji И
ЛХ..1С ь|
где tfjj - расстояние меяду точками установки ножевой и хвостовой матриц.
Структура блока 10 приведена на фиг. 5. Вычисление угла поворота на переходной кривой осуществляется квадратором 89, положительным элементом 90 и сумматором 91. Квадра5 тор 89 возводит квадрат, элемент 90 умножает ,- на/бс параметр С поступает из задатчика 92 через .выход 93, а из задатчика 94 постуи q „ пает постоянный параметр - . На выходе сумматора 91 получается сигнал пропорциональный требуемому углу поворота |3 , которьй через усилитель 95 поступает на вход блока 2 отклонения луча. Одновременно этот сигнал через усилитель 96 подается на вход сумматора 97, на второй вход которого поступает сигнал с задатчика 94, а на третий вход сигнал, пропорциональный величине (ei-Внх) с множительного элемен та 98, один из входов которого связан с задатчиком. 92, а второй - с квадратором 99. На квадратор 99 сигнал поступает из сумматора 100, в котором определяется разность (:С - С„ц). Величина поступает из задатчика 101. Умножение на величину (ё - &),) осуществляется элементом 102 умножения, сигнал с которого поступает на вход .блока 7 При проходке горизонтальной круговой кривой тоже осуществляется поворот луча и введение поправки в координату хвоста. На круговой кривой угол является линейной функ цией пройденного расстояния В;. , т.е. (Х- К- С . В положении II пе реключателя 103 сигнал,, пропорциональный t, поступает с выхода бло ка 11 (фиг. 5) на вход усилителя 105, находящегося в блоке 10, отку да подается на вход блока 2 отклонения луча. Одновременно вводится поправка Ь Х)( в координату, измеренную хво товой матрицей 4 (фиг. 2) , которая определяется по известной формуле (Фиг. 8) 1, .t/ iilil /е-е -t I -TRw«(« Hx где R - радиус кривой. Элемент 106 блока 10 (фиг. 5) умножает пройденное расстояние В; , поступающее из блока 11, на рассто ние между точками установки ножево .и хвостовой матриц 6„, , поступающе с выхода задатчика 101. В квадраторе 107 определяется 6 и далее сигнал поступает на вход сумматора 108, на второй вход которого подае ся сигнал с элемента 106 умножения С сумматора 108 сигнал поступает н элемент 109 умножения, на второй вход которого поступает сигнал, пр 23J2 порциональный R, с задатчика 110. С выхода элемента 109 поправка & Х., i поступает в блок 7. . В вертикальной плоскости поворот луча не производится, так как радиусы кривых более 3000 м, потому достаточно только введения поправок в измерения координат. При этом . направление движения щита задается лучом лазера по хорде. Поправка А Уц определяется по известной формуле (фиг. 9) «,.il-(iijbl.i(s4..-n.r, где S - длина хордыJ R - радиус кривой, Bj - расстояние от начала кривой до ножевой матрицы. При движении щита по вертикальной кривой замыкается ключ 104 и сигнал, пропорциональный 6;„ , с выхода блока 11 поступает на квадратор 111 (фиг. 5), на выходе которого получаем - В; , поступающее на вход сумматора 113, на второй вход которого с элемента 112 умножения поступает сигнал, пропорциональный произведению S . Сигнал, пропорциональный S, поступает на вход элемента 112 умножения с задатчи- ка 114. С выхода сумматора 113 сигнал постзтает на вход элемента 1 Т5 умножения, на второй вход которого подается сигнал с задатчика 11(5 радиуса R. С выхода элемента 115 поправка Д УН поступает в блок 7. Поправка А Уцд определяется аналогично по выражению (фиг. 8) д,(с,-„- „и-{1,-„-е„х. Сигнал, пропорциональный расстоя- нию между ножевой и хвостовой матри-г цами, с задатчика 101 (фиг. 5) поступает на сумматор 117, на выходе которого получаем разность (t,(, ifx которая через квадратор 118 поступает на вход сумматора 110, на второй вход которого поступает S элемента 158 умноя№-тая. С сумматора 119 разность двух сигналов поступает на элемент 120 умножения, на второй вход которого поступает сигнал, пропорциональный радиусу кривой R, с задатчика 116. С выхода элемента 120 сигнал, пропорциональный поправке & У , поступает на эход блока 7. 13 с выхода блока. 7 аналоговые сигналы, пропорциональные коордг натам ножа Xf,, УН хвоста Хцд , , поступают на вход блока-9 вьфаботки управляющего воздействия (фиг. 5). Для управления щитом необходимо выработать управляющие воздействия в горизонтальной и вертикальной плоскостях. С этой целью определяются обобщенные координаты в соответствующих плоскостях. Обобщенная координата в горизонтальной плоскости равна Yo5 XH4(XH-Xx6) , где (Х - ) -.угол разворота щи.. та в горизонтально плоскости. Обобщенная координата в вертикальной плоскости равна Yo5-- H(VM-V,6l 2VH-V b. где (УМ Уцв) угол разворота щита в вертикальной плоскости. Введем коэффициенты пропорциональ ности К, получим алгоритмы управленияUf. К (2Х - ) - в горизонтальнойплоскости и,р К(2Ун - Ухе) - в вертикалькойплоскости В блоке 9 сигналы, пропорциональ ные координатам Х, и У , усиливаются усилителями 1.21 и 122 соответст венно и поступают на сумматоры 123 и 124, где складываются с сигналами, пропорциональными координатам Xjg и И выходе сумматоров получаем сигналы, пропорциональные обобщенным координатам, которые подаются на вход блока 20 и на уси лители 125 и 126, с которых аналоговые сигналы поступают на входы блоков 12 и 13. . В блоке 12 управления домкратами производится выработка управляю щего воздейстзия на домкраты щита, которые необходимо включить для его передвижки и управления в его горизонтальной и вертикальной плос костях. Управление направленным движением щита достигается смещением ра недействующей усилий щитовых домкратов относительно горизонтальной и вертикальной осей щита в его поп 314 речном сеченни. Для смещения равнодействующей усилий npiTOBMx домкратов отключают несимметрично часть домкратов. При отклонении щита от заданного направления в горизонтальной плоскости отключается часть домкратов справа или слева от вертикальной оси У (фиг. 7), начиная с наиболее удаленного, по алгоритму U.4,.-K,(U.4|u, При отклонении щита от заданного направления в вертикальной плоскости отключается часть домкратов вьше или ниже горизонтальной оси X (фиг. 7), начиная с наиболее удаленного, по алгоритму dUfp ,bp . Блок 12 состоит из двух параллельных каналов, состоящих из дифференцирующих элементов 127 и 128, формирователей 129 и 130 модулей, . связанных с элементами 131 и 132 умножения соответст,венно, которые соединены с сумматорами 133 и 134 соответственно, связанными с элементами 135 и 136 переменного коэффициента. В качестве элемента с управляемым коэффициентом передачи используются, например, нелинейные полупроводниковые сопротивления с двумя парами электродов. Проводимость между двумя электродами нелинейных полупроводниковых сопротивлений изменяется в зависимости от величины управляющего сигнала, приложенного к другой паре электродов от блока 20. В блоке 12 происходит дифференцирование сигналов дифференцирующими элементами 127 и 128, определение его модуля формирователями 129 и 130, перемножение модулей и производных элементами 131 и 132 умножения и сложение с основньм сигналом сумматорами 133 и 134. Затем - сигналы поступают через элементы переменного коэффициента на исполнительные механизмы (например, электрогидрозолотники) гидродомкратов 137- в вертикальной плоскости и 138- в горизонтальной плоскости, находящиеся в блоке 14 (фиг. 5). Блок 13 управления копир-резцом, структура которого приведена на фиг. 5, в зависимости от положения
щита выдает сигнал на включение копир-резца справа или слева от вертикальной оси У (фиг. 7) либо выше или ниже оси X, Епок 13 состоит кз формирователей 139 и 140 знаков, индикатора 141 наибольшего напряжения, в качестве которого используется, например, двухобмоточное поляризованное реле. При равенстве сигналов контакты 142 реле находятся в нейтральном положении. Если один из сигналов Ugp , Urp, стает больше, контакт 142 реле 141 перейдет в одно из крайних положений и подключит наибольший сигнал-К обмотке поляризовагнного реле 143, которое в зависимости от знака входного сигнала включит в блоке 15 исполнительный механизм копир-резца.
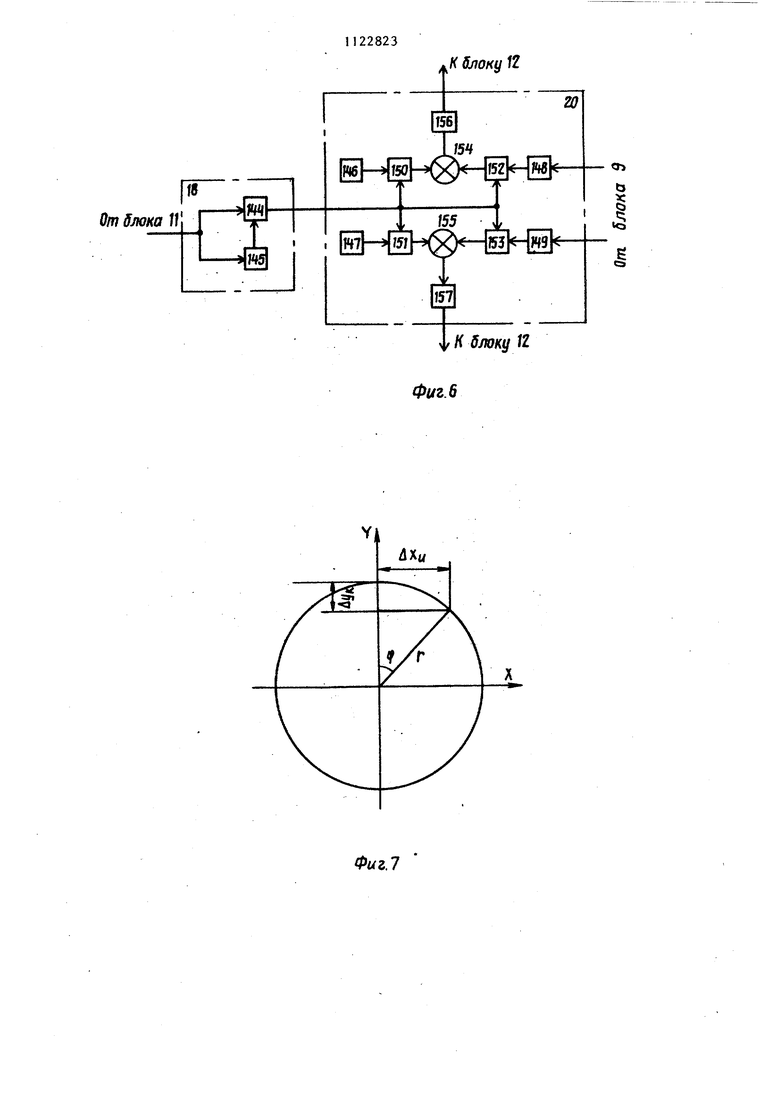
Командньй блок 19 состоит из двух реле 144 и 145 (фиг. 6), причем реле 145 имеет вьщержку времени при включении. При срабатывании реле 86 блока 11 (фиг. 5) включается реле 144, которое включает в работу анализирующий блок 20 (фиг. 6) Затем реле 144 через заданное время выключается посредством реле 145 Таким образом, командный блок через каждый метр пути пройденного щитом вьздает команду на анализ положения щита.
Анализ отклонения обобщенных, координат от предельнодопустимых осуществляет анализирующий блок 20, структура которого приведена на фиг. 6. Блок 20 состоит из задающих элементов 146 и 147, формирователей
148 и 149 модулей, которые через ключи 150-152 и 153 соединяются с элементами 154 и 155 сравнения, выходы которых подключены к исполнительным элементам 156 и 157, соответственно. В качестве исполнительных элементов могут служить, например, интеграторы с компенсацией влияния утечки емкости, при этом в
0 них используются полистироловые конденсаторы, которые могут сохранять напряжение заряда с высокой точностью довольно длительное время (до 24 ч).
5 Через каждый метр пройденного пути по сигналу с командного блока на заданное время посредством ключей 150-153 элементы 154 и 155 сравнения подключаются к задающим эле0 ментам 146 и 147 и формирователям 148 и 149 модулей. С элементов сравнения разность аналоговых сигналов, пропорциональная отклонению обобщенных координат от предельнодопусти5 мых, поступает на исполнительные элементы 156 и 157 и далее на управляющие входы элементов переменного коэффициента блока 12.
0 Применение предлагаемой системы позволит автоматизировать процесс ведения, горнопроходческого щита, .повысить точность и надежность управления, что снизит яепроизводительные затраты, повысит производительность труда, улучшит условия и безопасность работы обслуживающего персонала.
«vj
M
От блока /I
дК 5лону 12
Фиг.6 Я блощ} 12


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |

СИСТЕМА АВТОМАТИЧЕСКОГО ВЕДЕНИЯ ГОРНОПРОХОДЧЕСКОГО ЩИТА, I содержащая последовательно соединенные оптический задатчик направления (например, лазер), диафрагму, матрицы с фотоэлементами, связанные с блоком измерения координат отрез- . ка, параллельного оси щита, блок измерения пройденного расстояния, связанный через блок определения поправок с блоком отклонения луча, , установленным между задатчиком направления и диафрагмойа исполнительные механизмы домкратов, копир-резца и элеронов, отличающаяс я- тем, что, с целью повышения точности и надежности управления, она снабжена блоком вычисления координат ножа и хвоста щита, блоком . выработки управляющего воздействия, блоком управления домкратами, блоком управления копир-резцом, командным блоком, анализ1фующим блоком, блоком контроля крена, блоком управления элеронами, причем выход блока контроля крена соединен с входом блока управления элеронами и с первым входом блока вычисления координат ножа и хвоста щита, выход.которого соединен с входом блока выработки управляющего воздействия, первьш выход которого соединен с первыми входами блоков управления домкратами и копир-резцом, а второй выход подключен к первому аходу анализирующего блока, выход которого соединен с вторьм входом блока управления домкратами, второй выход блока измерения пройденного расстояния подключен к входу командного блока, выход которого соединен с ВТОРЫМ входом анализирующего блока, при этш выход блока измерения ко- , ординат отрезка, параллельного оси щита, подключен к второму входу блока вычисления координат ножа и хвое та , второй выход блока определения поправок соединен с третыр входом блока вычисления координат ножа и хвоста щита, а выходы блоко1 управления домкратами, копир-резцом и элеронами подключены к осот;ветствукмцим исполнительным механиз-мам щита.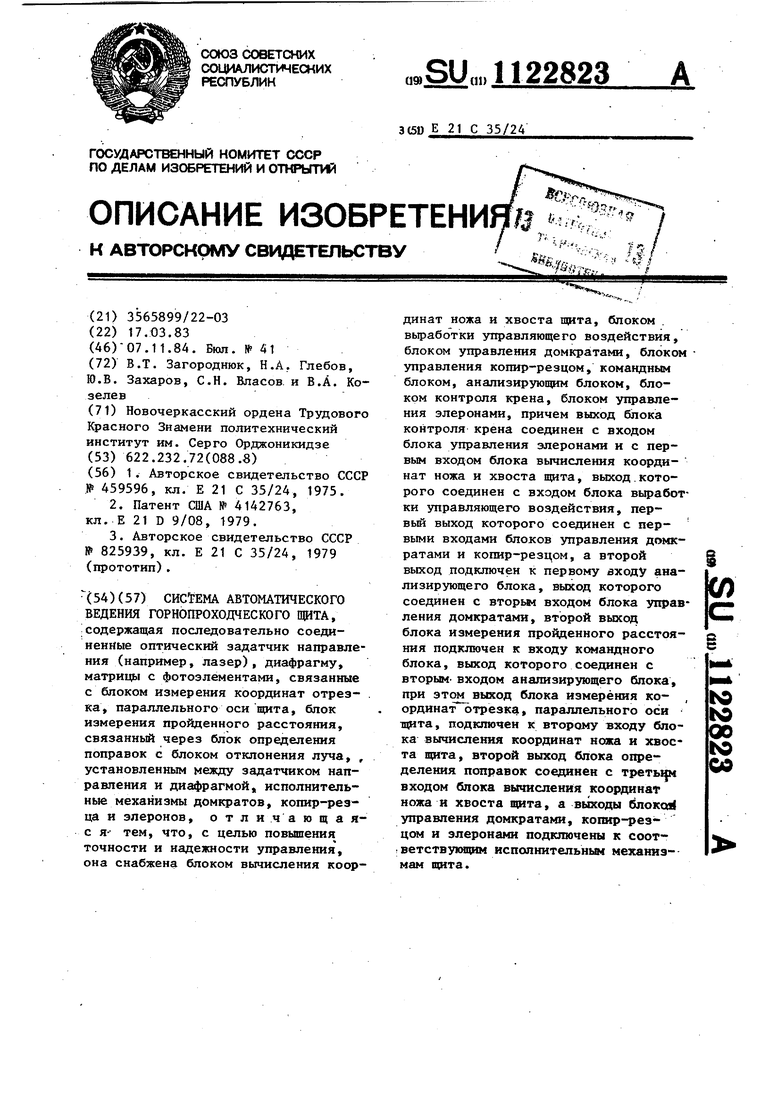
Фиг.7
Фиг. 9
Фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля положения горнопроходческой машины | 1971 |
|
SU459596A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
