I
Изобретение относится к строительству линейных сооружений, а точнее к управлению строительными машинами и механизмами при движении их по круговым кривым, иможет быть использовано при проходке тоннелей, выемке грунта в траншеях и укладке покрытия дорог.
Известно устройство для управления идуш,ей вдоль трассы машиной, содержаш.ее излучатель с источником излучения, систему отклонения луча, экран со светочувствительными элементами, самопишущий прибор и регулировочное устройство 1. В излучателе оптическое приспособление поворота луча связано с шаговыми исполнительными органами. Система отклонения луча содержит отклоняющее оптическое приспособление с шаговыми исполнительными органами и приспособление для разделения луча на два световых потока, один из которых характеризует отклонение машины по горизонтальному направлению, а другой - по высоте. Самопишущий прибор содержит последовательно связанные устройство для ввода программы, устройство для приема сигналов, логическое решаюшее устройство для приема сигналов, логическое решающее устройство и устройство выработки сигналов управления.
Регулировочное устройство имеет каналы связи с самопишущим прибором и исполнительными органами оптических приспособ, лений.
Недостатком устройства является сложность конструкции (пять узлов с каналами связи, каждый из узлов содержит несколько блоков), что приводит к высокой стоимости оборудования и снижению надежности его 10 работы, особенно в условиях строительных площадок.
Цель изобретения - повышение надежности работы.
Это достигается тем, что в устройство, содержащее излучатель, отклоняющую систему и экран со светочувствительными элементами, введен счетчик пути, связанный с отклоняющим приспособлением через водило с установленным на нем с возможностью перемещения зубчатым сектором, входящим в зацепление с вы.ходным валом счетчика пути, при этом величина перемещения зубчатого сектора вдоль водила определяется в соответствии с радиусом круговой кривой, устанавливаемым по щкале на водиле, причем передаточное отношение от счетчика пути к зубчатому сектору составляетП| , а передаточное отношение от зубчатого сектора к отклоняющему приспособлению nj. -J,
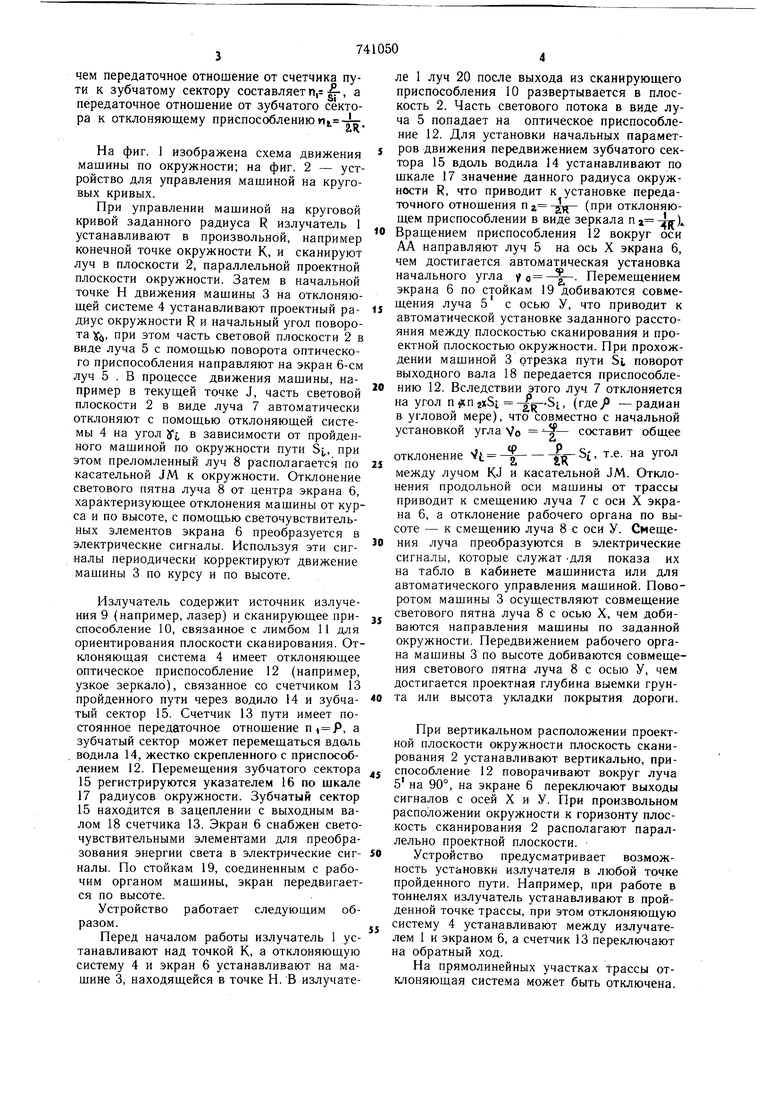
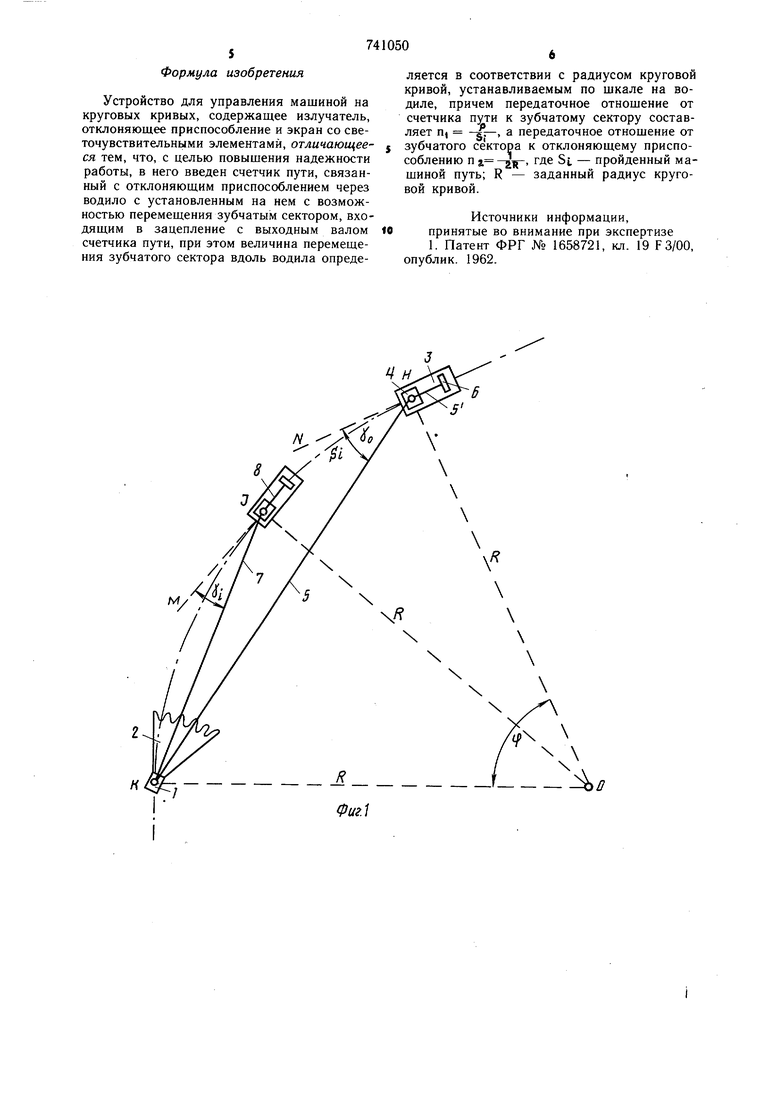
На фиг. 1 изображена схема движения машины по окружности; на фиг. 2 - устройство для управления машиной на круговых кривых.
При управлении машиной на круговой кривой заданного радиуса R излучатель 1 устанавливают в произвольной, например конечной точке окружности К, и сканируют луч в плоскости 2, параллельной проектной плоскости окружности. Затем в начальной точке Н движения машины 3 на отклоняюшей системе 4 устанавливают проектный радиус окружности R и начальный угол поворота у, при этом часть световой плоскости 2 в виде луча 5 с помош,ью поворота оптического приспособления направляют на экран 6-см луч 5 . В процессе движения машины, например в текущей точке J, часть световой плоскости 2 в виде луча 7 автоматически отклоняют с помощью отклоняющей системы 4 на угол У1 в зависимости от пройденного машиной по окружности пути S,, при этом преломленный луч 8 располагается по касательной JM к окружности. Отклонение светового пятна луча 8 от центра экрана 6, характеризующее отклонения машины от курса и по высоте, с помощью светочувствительных элементов экрана 6 преобразуется в электрические сигналы. Используя эти сигналы периодически корректируют движение машины 3 по курсу и по высоте.
Излучатель содержит источник излучения 9 (например, лазер) и сканирующее приспособление 10, связанное с лимбом 11 для ориентирования плоскости сканирования. Отклоняющая система 4 имеет отклоняющее оптическое приспособление 12 (например, узкое зеркало), связанное со счетчиком 13 пройденного пути через водило 14 и зубчатый сектор 15. Счетчик 13 пути имеет постоянное передаточное отношение , а зубчатый сектор может перемещаться вдоль водила 14, жестко скрепленного с приспособлением 12. Перемещения зубчатого сектора 15 регистрируются указателем 16 по шкале 17 радиусов окружности. Зубчатый сектор 15 находится в зацеплении с выходным валом 18 счетчика 13. Экран 6 снабжен светочувствительными элементами для преобразования энергии света в электрические сигналы. По стойкам 19, соединенным с рабочим органом машины, экран передвигается по высоте.
Устройство работает следующим образом.
Перед началом работы излучатель 1 устанавливают над точкой К, а отклоняющую систему 4 и экран 6 устанавливают на машине 3, находящейся в точке Н. В излучателе 1 луч 20 после выхода из сканирующего приспособления 10 развертывается в плоскость 2. Часть светового потока в виде луча 5 попадает на оптическое приспособление 12. Для установки начальных параметров движения передвижением зубчатого сектора 15 вдоль водила 14 устанавливают по шкале 17 значение данного радиуса окружности R, что приводит к установке передаточного отношения п г -JR- (при отклоняющем приспособлении в виде зеркала п ) О Вращением приспособления 12 вокруг оси АА направляют луч 5 на ось X экрана 6, чем достигается автоматическая установка начального угла Перемещением экрана 6 по стойкам 19 добиваются совмещения луча 5 с осью У, что приводит к автоматической установке заданного расстояния между плоскостью сканирования и проектной плоскостью окружности. При прохождении машиной 3 отрезка пути Si, поворот выходного вала 18 передается приспособлео ВИЮ 12. Вследствии этого луч 7 отклоняется на угол п кпгхЗ;. .Si, (где -радиан в угловой мере), что совместно с начальной установкой угла Vo - составит общее
отклонение t -||R- , т.е. на угол
между лучом KJ и касательной JM. Отклонения продольной оси машины от трассы приводит к смещению луча 7 с оси X экрана 6, а отклонение рабочего органа по высоте - к смещению луча 8 с оси У. Сиеще0 ния луча преобразуются в электрические сигналы, которые служат -для показа их на табло в кабинете машиниста или для автоматического управления машиной. Поворотом машины 3 осуществляют совмещение светового пятна луча 8 с осью X, чем добиваются направления машины по заданной окружности. Передвижением рабочего органа машины 3 по высоте добиваются совмещения светового пятна луча 8 с осью У, чем достигается проектная глубина выемки грун0 та или высота укладки покрытия дороги.
При вертикальном расположении проектной плоскости окружности плоскость сканирования 2 устанавливают вертикально, приспособление 12 поворачивают вокруг луча 5 на 90°, на экране 6 переключают выходы сигналов с осей X и У. При произвольном расположении окружности к горизонту плоскость сканирования 2 располагают параллельно проектной плоскости.
o Устройство предусматривает возможность установки излучателя в любой точке пройденного пути. Например, при работе в тоннелях излучатель устанавливают в пройденной точке трассы, при этом отклоняющую
J систему 4 устанавливают между излучателем 1 и экраном 6, а счетчик 13 переключают на обратный ход.
На прямолинейных участках Трассы отклоняющая система может быть отключена.
Формула изобретения
Устройство для управления машиной на круговых кривых, содержащее излучатель, отклоняющее приспособление и экран со светочувствительными элементами, отличающееся тем, что, с целью повышения надежности работы, в него введен счетчик пути, связанный с отклоняющим приспособлением через водило с установленным на нем с возможностью перемещения зубчатым сектором, входящим в зацепление с выходным валом счетчика пути, при этом величина перемещения зубчатого сектора вдоль водила определяется в соответствии с радиусом круговой кривой, устанавливаемым по шкале на водиле, причем передаточное отнощение от счетчика пути к зубчатому сектору составляет n -§г-, а передаточное отношение от зубчатого сектора к отклоняющему приспособлению п . где Si. - пройденный машиной путь; R - заданный радиус круговой кривой.
Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1658721, кл. 19 F3/00, опублик. 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ вождения самолетов | 1935 |
|
SU50170A1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДАННЫХ ПЛОЩАДНЫХ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 1971 |
|
SU314173A1 |
| СПОСОБ КОНТРОЛЯ НЕПРЯМОЛИНЕЙНОСТИ ОСИ ЦИЛИНДРИЧЕСКОГО ОБЪЕКТА | 1973 |
|
SU362187A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2326324C1 |
| Устройство для записи отклонений рельсового пути | 1983 |
|
SU1232722A1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
Фиг.1
ts
