1
-Изобретение относится к средства контроля технологических параметров прокатного производства, в частност к устройствам слежения за формой прокатываемой полосы из ферромагнитного материала путем контроля распределения натяжения по ее ширине.
Целью изобретения является повышение достоверности контроля распределения натяжения по пшрине прокаты ваемой полосы.
На фиг, 1 схематично изображено расположение и ориентация экранированных магнитоанизотропных датчиков устройства для контроля распределен натяжения по ширине прокатываемой полосы; на фиг, 2 - графики влияния полей рассеивания и полей взаимодействия двух экранированных магнитоанизотропных датчиков в зависимости от расстояния между ними при различных воздушных зазорах и различной взаимной ориентации; на фиг, 3 - блок-схема устройства для контроля распределения натяжения по ширине прокатываемой полосы.
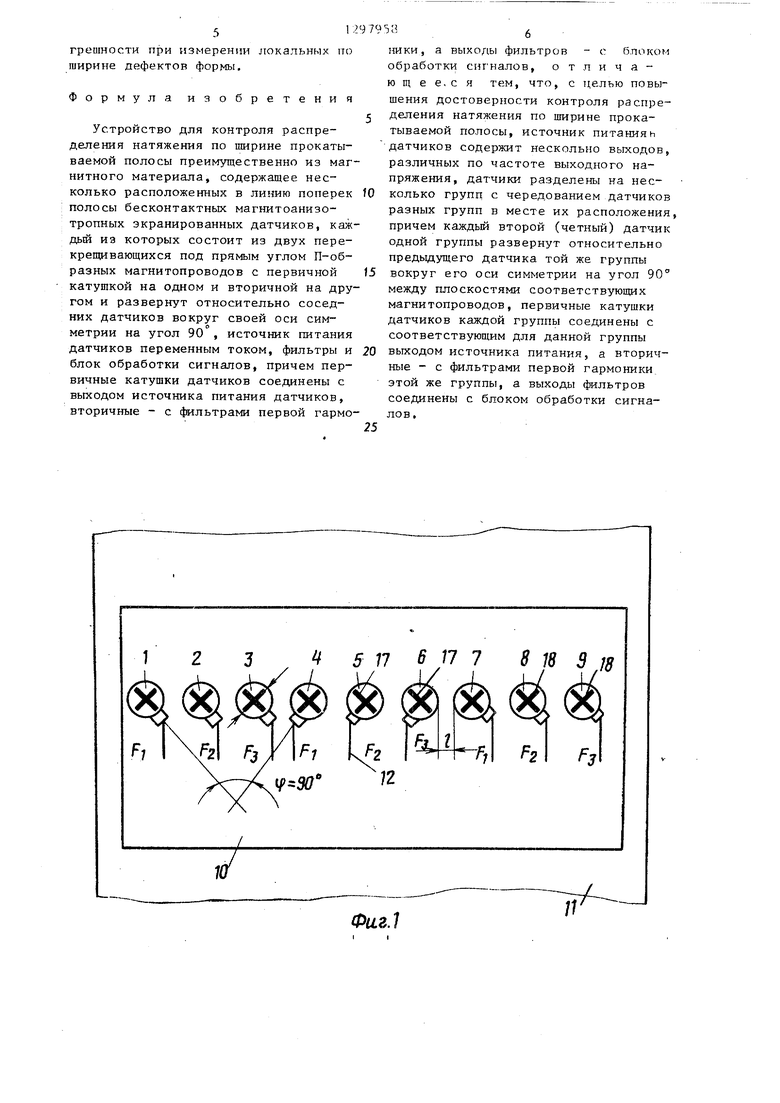
Устройство состоит, например, из девяти экранированных магнитоанизотропных датчиков 1 - 9 диаметром d, установленных в линию на расстояниях .Г между 1ШМИ в защитной проводке 10, расположенной перпендикулярно направлению прокатки контролируемой полосы 11. Все датчики кабелями 12 соединены с источником 13 питания датчиков и фильтра ш 14 - 16 (фиг, 3),
Конструктивно каждьй датчик пред ставля;ет собой два П-образных магни
топровода 17 и 18, собранных из лис- товой трансформаторной стали, Магни- топроводы расположены крестообразно
О
под углом 90 друг к другу и под углом 45° относительно направления действующих в полосе напряжений. На магнитопроводе 17 намотана первичная катушка, на магнитопроводе 18 - вторичная. Все датчики экранированы дру от друга цилиндрическими кожухами из магнитного материала.
Источник 13 питания датчиков выполнен в данном случае трехчастот- ным и .имеет три выхода с частотами напряжения питания датчиков F , F и F , Датчики 1-9 образуют группы (датчики 1,4 и 7; датчики 2,5 и 8; датчики 3,6.и 9), в которых первичны обмотки подсоединены соответственно: у первой группы - к выходу нсточни
0
5
ка 13 питания с частотой F , у второй - к выходу с частотой F , у тре тьей - к выходу с частотой F , В этих группах средние датчики 4-6 развернуты вокруг оси симметрии на 90 относительно крайних датчиков 1,7; 2,8 и 3,9, т,е, каждый второй (четный) датчик одной группы развернут относительно предыдущего датчика той же группы вокруг его оси симметрии на 90 между плоскостями соответствующих ма.гнитопроводов, первым по порядку расположен датчик 1 из группы с частотой питания F, вторым - датчик 2 из группы тотой питания F , третьим - датчик 3 из группы с частотой питания F,
Вторичные катугики датчиков группы с частотой питания 1, (датчики 1, . 4 и 7) соединены с полосовыми фильтрами 14, резонансная частота которых равна F , Аналогичным образом вторичные катушки датчиков групп с частотами F,, (датчики 2,5 и 8) и F
0
5
0
1- с час(J i-J. ij, /
(датчики 3,6 и 9) соединены с полосовыми фильтрами,.резонансные частоты которых равны соответственно F, (фильтр 15) и EJ (фильтр 16), Выходы фильтров соединены с блоком 19 обработки сигналов.
Устройство работает следующим образом,
При измерении напряжений по ширине полосы проводку 10 с датчиками 19 устанавливают на определенном. . расстоянии от полосы 11, Полюса маг- нитопроводов всех датчиков обращены к полосе. Магнитный поток магнитопро- водов с первичной катушкой замыкает-.- ся через метапл полосы П., в котором измеряются напрялсения. При появлении в полосе растягивающих напряжений магнитная проницаемость вдоль и поперек полосы изменяется неодинаково,
5 Вдоль действия напряжений магнитная проницаемость изменяется намного интенсивнее. Магнитное поле в полосе искривляется, часть магнитного потока замыкается через магнитопровод со
fjQ вторичной катушкой, и на выходе последней появляется ЭДС, величина которой зависит от разности магнитной проницаемости вдоль и поперек полосы и пропорциональна натяжению полосы,
ее Выходные сигналы датчиков с вторичных катушек поступают на полосовые фильтры 14 - 16 первой гармоники, где с целью повышеьшя линейности характеристик датчика отфильтровываются
высшие гармош-гки, присутс-тпуюпще в спектре выходного сигнала датчика, С выхода фильтров сигналы датчика поступают на входы блока 19 обработки сигналов, где они образуются в удобную для регистрации форму: детектируются, сглаживаются, нормализуются и т.д.
.Разделение частот питания датчиков в устройстве, применение полосо- вых фильтров первой гармоники выход- ных слгнапов датчиков, а также соответствующая ориентация датчиков должны уменьшить влияние полей рассеивания датчиков на процесс измерения распреде ления натяжения по ширине полосы.
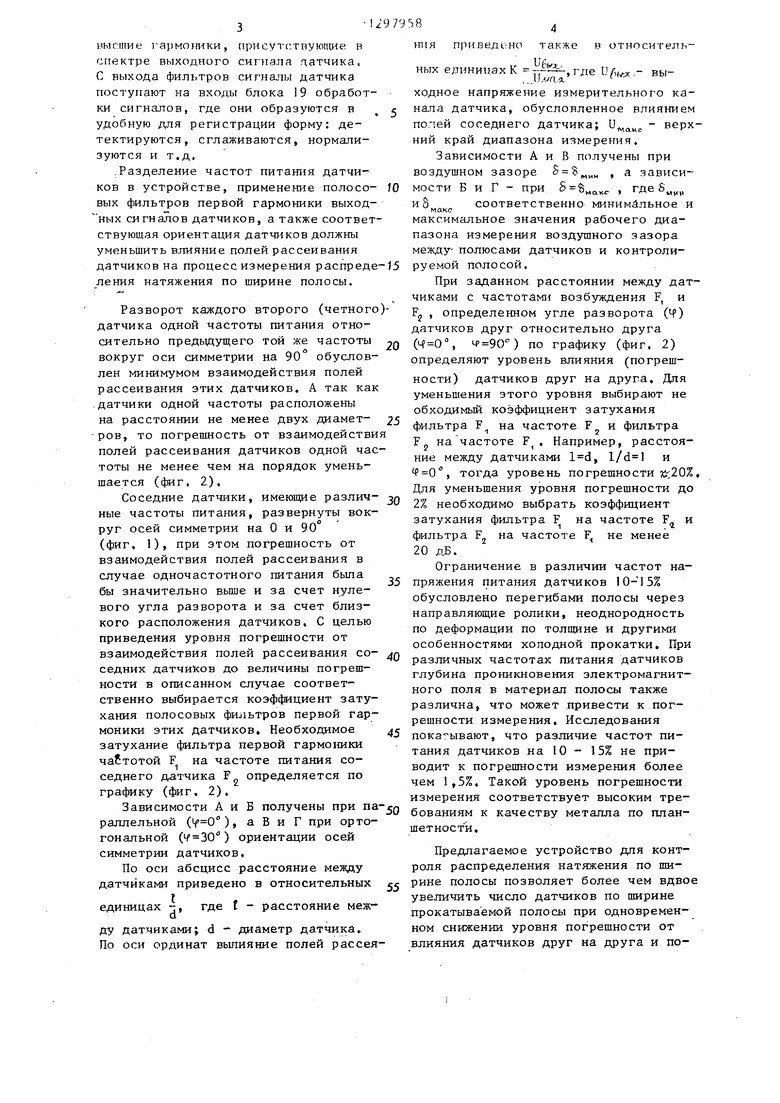
Разворот каждого второго (четного датчика одной частоты питания относительно предыдущего той же частоты вокруг оси симметрии на 90 обусловлен минимумом взаимодействия полей рассеивания этих датчиков. А так как датчики одной частоты расположень на расстоянии не менее двух диаметров, то погрешность от взаимодействия полей рассеивания датчиков одной частоты не менее чем на порядок уменьшается (фиг, 2),
20
25
При заданном расстоянии между датчиками с частотами возбуждения F, и F, , определенном угле разворота (Ч) датчиков друг относительно друга (, ) по графику (фиг, 2) определяют уровень влияния (погрешности) датчиков друг на друга. Для уменьшения этого уровня выбирают не обходимый коэффициент затухания фильтра F на частоте F и фильтра F2 на частоте F, Например, расстояние между датчиками , и , тогда уровень погрешности 5й;20%
Для уменьшения уровня погрешности до Соседние датчики, имеющие раэлич- эл то ,- .,
V f JU 2% необходимо выбрать коэффициент ные частоты питания, развернуты вокруг осей симметрии на О и 90° (фиг. 1), при этом погрешность от взаимодействия полей рассеивания в случае одночастотного питания была бы значительно вьш1е и за счет нулевого угла разворота и за счет близкого расположения датчиков. С целью приведения уровня погрешности от
затухания фильтра F на частоте F и фильтра F на частоте F, не менее 20 дБ.
Ограничение в различии частот на- 35 пряжения питания датчиков 10- 15% обусловлено перегибами полосы через направляющие ролики, неоднородность по деформации по толщине и другими
особенностями холодной прокатки. При взаимодействия полей рассеивания со- JQ
седник датчи4сов до величины погрешности в описанном случае соответственно выбирается коэффициент затухания полосовых фильтров первой гар45
МОНИКИ этих датчиков. Необходимое затухание фильтра первой гармоники частотой F на частоте питания соседнего датчика F определяется по графику (фиг. 2),
различных частотах питания датчиков глубина проникновения электромагнитного поля в материал полоо также различна, что может привести к погрешности измерения. Исследования показывают, что различие частот питания датчиков на 10 - 15% не приводит к погрешности измерения более чем 1,5%. Такой уровень погрешности
измерения соответствует высоким тре- Зависимости А и Б получены при бованиям к качеству металла по планраллельной (), а В и Г при ортогональной () ориентации осей симметрии датчиков.
По оси абсцисс расстояние между датчиками приведено в относительных I
единицах -, а
где t - расстояние межшетност и.
Предлагаемое устройство для контроля распределения натяжения по ши- гс рине полосы позволяет более чем вдвое увеличить число датчиков по ширине прокатываемой полосы при одновременном снижении уровня погрешности от влияния датчиков друг на друга и поду датчиками; d - диаметр датчика. По оси ординат выпияние полей рассея
Ю J5
-
20
25
4
miH приведено также t относительных единицах К --,где 17)ь« - выходное напряжение измерительного канала датчика, обусловленное влиянием полей соседнего датчика; U. - верхний край диапазона измерения.
Зависимости А и В получены при воздушном зазоре S ; , а зависимости Б и Г - при , где8„ „ MQKo соответственно минимальное и максимальное значения рабочего диапазона измерения воздушного зазора между- полюсами датчиков и контролируемой полосой.
При заданном расстоянии между датчиками с частотами возбуждения F, и F, , определенном угле разворота (Ч) датчиков друг относительно друга (, ) по графику (фиг, 2) определяют уровень влияния (погрешности) датчиков друг на друга. Для уменьшения этого уровня выбирают не обходимый коэффициент затухания фильтра F на частоте F и фильтра F2 на частоте F, Например, расстояние между датчиками , и , тогда уровень погрешности 5й;20%,
2% необходимо выбрать коэффициент
затухания фильтра F на частоте F и фильтра F на частоте F, не менее 20 дБ.
Ограничение в различии частот на- пряжения питания датчиков 10- 15% обусловлено перегибами полосы через направляющие ролики, неоднородность по деформации по толщине и другими
особенностями холодной прокатки. При
различных частотах питания датчиков глубина проникновения электромагнитного поля в материал полоо также различна, что может привести к погрешности измерения. Исследования показывают, что различие частот питания датчиков на 10 - 15% не приводит к погрешности измерения более чем 1,5%. Такой уровень погрешности
шетност и.
Предлагаемое устройство для контроля распределения натяжения по ши- рине полосы позволяет более чем вдвое увеличить число датчиков по ширине прокатываемой полосы при одновременном снижении уровня погрешности от влияния датчиков друг на друга и по51
грешности при измерении локальных по ширине дефектов формы.
Формула изобретения
Устройство для контроля распределения натяжения по ширине прокатываемой полосы преимущественно из магнитного материала, содержащее несколько расположенных в линию поперек полосы бесконтактных магнитоанизо- тропных экранированных датчиков, каждый из которых состоит из двух перекрещивающихся под прямым углом П-об- разных магнитопроводов с первичной катушкой на одном и вторичной на другом и развернут относительно соседних датчиков вокруг своей оси симметрии на угол 90 , источник питания датчиков переменным током, фильтры и блок обработки сигналов, причем первичные катушки датчиков соединены с выходом источника питания датчиков, вторичные - с фильтрами первой гармо
ники, а ВЫХО/1Ы фильтров - с блоком обработки сигналов, о т л и ч а - ю щ е е, с я тем, что, с целью повышения достоверности контроля распределения натяжения по ширине прокатываемой полосы, источник питанияh датчиков содержит несколько выходов, различных по частоте выходного напряжения, датчики разделены на несколько групп с чередованием датчиков разных групп в месте их расположения, причем каждый второй (четный) датчик одной группы развернут относительно предыдущего датчика той же группы
вокруг его оси симметрии на угол 90° между плоскостями соответствующих магнитопроводов, первичные катущки датчиков каждой группы соединены с соответствующим для данной группы
выходом источника питания, а вторичные - с фильтрами первой гармоники этой же группы, а выходы фильтров соединены с блоком обработки сигналов .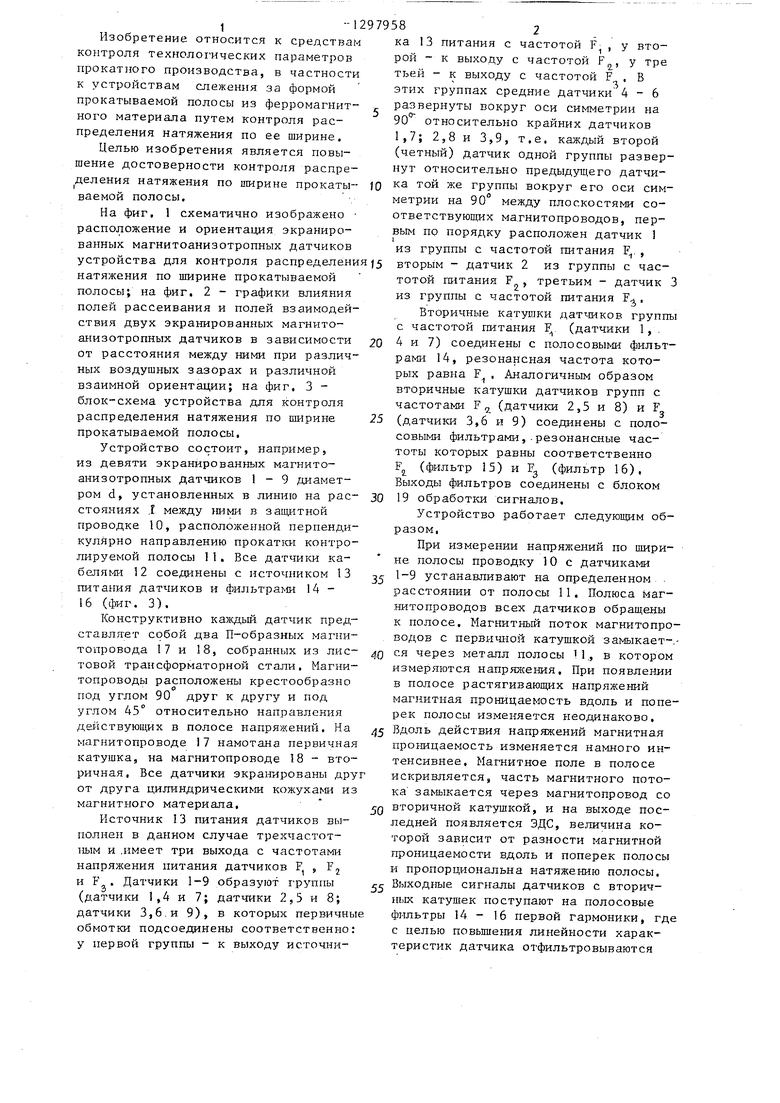
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство индикации удельных натяжений по ширине прокатываемой полосы | 1988 |
|
SU1563798A1 |
| Устройство контроля распределения удельных натяжений по ширине прокатываемой ферромагнитной полосы | 1988 |
|
SU1579595A1 |
| Весоизмерительное устройство | 1983 |
|
SU1103080A1 |
| Система контроля распределения удельных натяжений по ширине прокатываемой ферромагнитной полосы | 1988 |
|
SU1563797A1 |
| СПОСОБ КОНТРОЛЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ РЕЛЬСОВЫХ ПЛЕТЕЙ В УСЛОВИЯХ НАЛИЧИЯ МАГНИТНЫХ И ТЕМПЕРАТУРНЫХ ПОЛЕЙ МЕТОДОМ ШУМОВ БАРКГАУЗЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2640492C1 |
| Устройство для измерения натяжения рулонного материала | 1984 |
|
SU1471093A1 |
| МАГНИТОУПРУГИЙ МАГНИТОИЗОТРОПНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2345336C1 |
| Датчик угла отклонения от вертикали | 1982 |
|
SU1092270A1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ТОЛЩИНЫ СЛОЕВ БИМЕТАЛЛА С ФЕРРОМАГНИТНЫМ ОСНОВАНИЕМ | 2002 |
|
RU2210058C1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УДЕЛЬНЫХ ПОТЕРЬ В АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 1990 |
|
RU2029313C1 |
Изобретение относится к средствам контроля технологических параметров прокатного производства, в частности к устройствам слежения за формой прокатываемой полосы из ферромагнитного материала путем контроля распределения натяжения по ее ширине. Цель изобретения - повышение достоверности контроля путем уменьшения влияния магнитных полей рассеяния соседних датчиков в воздушном зазоре и взаимодействия магнитных полей в контролируемой полосе. Существо изобретения заключается в том, что поперек прокатываемой полосы расположено несколько бесконтактных магнитоанизотронных экранированных датчиков механических напряжений переменного тока. Уменьшение влияния магнитных полей достигается за счет того, что все датчики разделены не менее чем на две группы с чередованием датчиков различных групп, причем каждьй второй Датчик рдной группы развернут относительно предыдущего датчика той же группы на угол 90°. Первичные катушки каждой группы датчиков подсоединены к соответствующему источнику переменного тока с различйЬ1ми частотами. Вторичные катушки датчиков через фильтры подсоединены к измерительному блоку. 3 ил. с го со -vj QD СЛ 00
8 J8 3 т
FI
Фаг.1
I
в систепу oSfnoftomuvecHoio ffOHUff ipopffoi полосы
ФигЗ
Составитель Ю. Рыбьев Редактор 0. Юрковецкая Техред Л.Сердюкова Корректор А. Обручар
Заказ 848/12Тираж 481Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Шевакин Ю | |||
| Ф | |||
| и др | |||
| Технические измерения и приборы в прокатном производстве | |||
| - М.: Металлургия, 1972, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| Патент Швеции № 388481, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
