113
Устройство относится к иг.пгтато- рам визуальной обстановки для тренажеров и моделирующих стендов различных транспортных средств.
На фиг,1 представлена структурная блок-схема предлагаемого имитатора визуальной обстановки оператора транспортного средства; на фиг.2 и 3 - блок-схемы формирования управляющих сигналов.
Имитатор визуальной обстановки тренажера транспортного средства содержит первый макет местности с , расположенными над ним источниками света - лампами 2, телевизионные камеры 3 и 4 с приводам 5 поперечного и приводом 6 продольного перемещения блоки 7 регулировки яркости источников света ламп 2 и 8, соединенными входами с выходами формирователя 9 управляющих сигналов, входы которого подключены к выходам датчиков 10 и 11 положения приводов, а выходы телекамер 3 и 4 связаны с входами сумматора 12 видеосигналов, соединенного выходом с видеоконтрольным блоком 13.
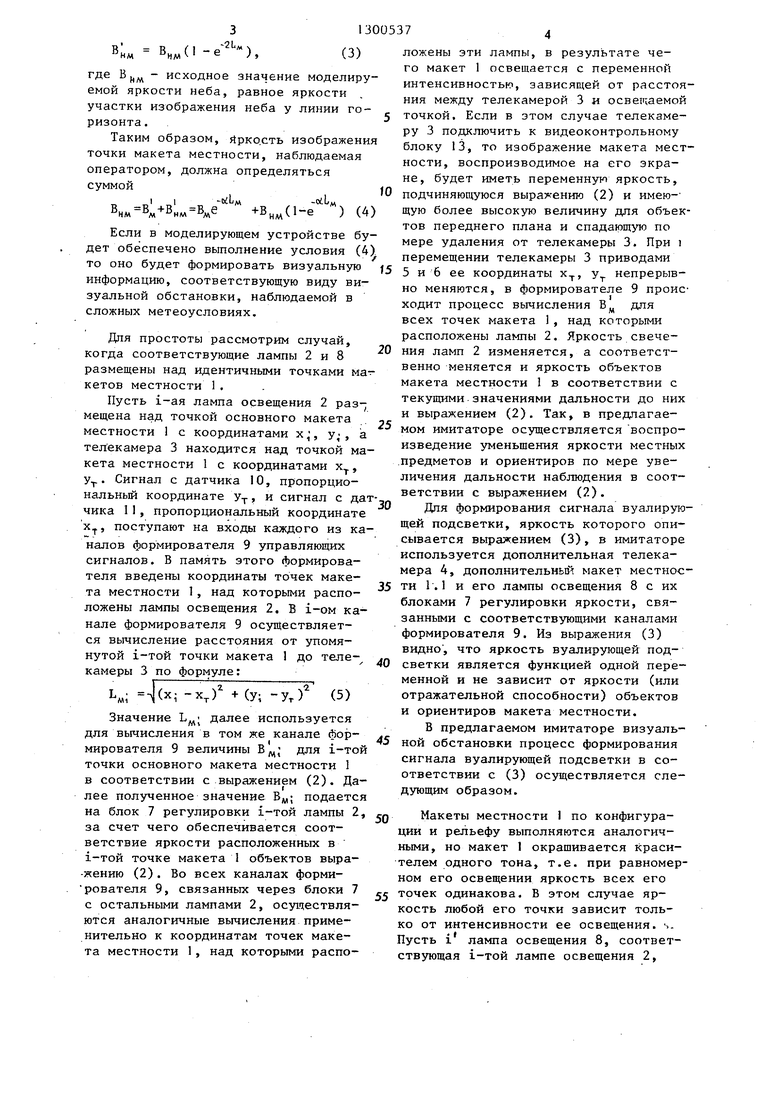
Формирователь 9 управляющих сигналов содержит цепочки, вьтолненные на последовательно соединенных сумматоре 14, элементе 15 вычисления корня квадратного, элементе 16 перемножения, элементе 17 вычисления экспоненты, формирователь 9 управляющих 35 точки макета местности по мере ее сигналов содержит также элементы удаления от оператора, причем спад
Выражение (1) показывает, что дл предоставления оператору визуальной информации, соответствующей виду -наблюдаемой в реальных сложных мете условиях визуальной обстановки, не- 30 обходимо, чтобы в имитаторе визуаль ной обстановки с макетом местности телекамерой осуществлялось выполне ние двух требований:
уменьшение яркости изображения
18-22 вычитания и элемент 23 перемножения .
При сложных метеоусловиях на видимость объекта существенное влияние оказывает промежуточная среда, находящаяся между наблюдателем и наблюдаемым объектом. Промежуточная среда представляет собой метеообразования (дымка, туман, дождь), ухудшающие видимость наземных объектов и ориентиров . Влияние промежуточной среды на видимость двояко. Во-первых, из- за рассеяния света в промежуточной среде уменьшается яркость объектов. Во-вторых, свет, рассеиваемый средой, создает вуалирующую подсветку,
накладывающуюся на видимое изображение объектов. Действие обоих фак.торов приводит к ухудшению видимости объектов. Видимость тем хуже, чем меньше прозрачность среды и чем боль
ше расстояние между наблюдателем и объектом наблюдения. Приведена фор
мула, описывающая видимую яркость объекта на местности
В „ + BJ1 -е ), (1)
где В - исходное (без учета промежуточной среды) значение яркости объекта; яркость насыщенного слоя, равная яркости неба у горизонта;
показатель ослабления среды; расстояние от объекта до наблюдателя.
В,. об L
5
0
35 точки макета местности по мере ее удаления от оператора, причем спад
Левое слагаемое определяет спад яркости наблюдаемого объекта из-за рассеяния света в промежуточной среде. Правое слагаемое определяет свет, рассеиваемый средой и создающий вуалирующую подсветку, накладывающуюся на видимое изображение местности. Как видно из выражения (), оба слагаемых являются функцией расстояния от объекта до наблюдателя.
Выражение (1) показывает, что для предоставления оператору визуальной информации, соответствующей виду -наблюдаемой в реальных сложных метеоусловиях визуальной обстановки, не- 0 обходимо, чтобы в имитаторе визуальной обстановки с макетом местности и телекамерой осуществлялось выполнение двух требований:
уменьшение яркости изображения .
5
яркости должен соответствовать первому слагаемому левой части и выражения (1) и описываться соотношением
I
БМ Вд, е
-2L,
(2)
где В„ - исходное значение видимой яркости рассматриваемой точки макета
(при малом расстоянии от телекамеры до рассматриваемой точки макета):
Ьд, - моделируемое значение текущего расстояния от наблюдателя до рассматриваемой точки моделируемой
местности (равно произведению расстояния от телекамеры до рассматриваемой точки макета местности на величину, обратную ма:сштабу макета) |
увеличение яркости всех точек рассматриваемого изображения на величину, вычисляемую в соответствии с видом второго слагаемого левой части выражения (1) и определяемую соотношением
В
В,
,(1 ).
(3)
Нм НАЛ
где Bji - исходное значение моделируемой яркости неба, равное яркости участки изображения неба у линии горизонта.
Таким образом, йрко.сть изображения точки макета местности, наблюдаемая оператором, должна определяться суммой
,
-isiLM
Внм(1-е
-OiL
) (4)
Если в моделирующем устройстве будет обеспечено выполнение условия (4) то оно будет формировать визуальную информацию, соответствующую виду визуальной обстановки, наблюдаемой в сложных метеоусловиях.
Для простоты рассмотрим случай, когда соответствующие лампы 2 и 8 размещены над идентичными точками макетов местности 1. .
Пусть i-ая лампа освещения 2 размещена над точкой основного макета местности 1 с координатами х ,, у , а телекамера 3 находится над точкой макета местности 1 с координатами х, у. Сигнал с датчика IО, пропорцио-
и сигнал с да
нальньй координате , „ .,„...„.. „„ чика 11, пропорциональный координате х, поступают на входы каждого из каналов формирователя 9 управляющих сигналов. В память этого формирователя введены координаты точек макета местности 1, над которыми расположены лампы освещения 2, В i-ом канале формирователя 9 осуществляется вычисление расстояния от упомянутой i-той точки макета 1 до теле- камеры 3 по формуле:
-.|(х- -X,) +(у; -y,f (5)
Значение далее используется для вьиисления в том же канале формирователя 9 величины В д для i-той точки основного макета местности 1 в соответствии с выражением (2). Далее полученное значение Вд,; подается на блок 7 регулировки i-той лампы 2, за счет чего обеспечивается соответствие яркости расположенных в i-той точке макета 1 объектов выра- -жению (2). Во всех каналах форми- рователя 9, связанных через блоки 7 с остальными лампами 2, осуществляются аналогичные вычисления применительно к координатам точек макета местности 1, над которыми распо
ложены эти лампы, в результате чего макет 1 освещается с переменной интенсивностью, зависящей от расстояния между телекамерой 3 и освещаемой точкой. Если в этом случае телекамеру 3 подключить к видеоконтрольному блоку 13, то изображение макета местности, воспроизводимое на его экране, будет иметь переменную яркость.
Q
0
5
5
0
5
подчиняющуюся выражению (2) и имею- щую более высокую величину для объектов переднего плана и спадающую по мере удаления от телекамеры 3. При i перемещении телекамеры 3 приводами 5 и 6 ее координаты х., у непрерывно меняются, в формирователе 9 проис ходит процесс вычисления В, для всех точек макета 1 , над которьтми расположены лампы 2. Яркость свечения ламп 2 изменяется, а соответственно меняется и яркость объектов макета местности 1 в соответствии с текущими.значениями дальности до них и выражением (2). Так, в предлагаемом имитаторе осуществляется воспроизведение уменьшения яркости местных предметов и ориентиров по мере увеличения дальности наблюдения в соответствии с выражением (2).
Дпя формирования сигнала вуалирующей подсветки, яркость которого описывается выражением (3), в имитаторе используется дополнительная телекамера 4, дополнительный макет местности 1.1 и его лампы освещения 8 с их блоками 7 регулировки яркости, связанными с соответствующими каналами формирователя 9. Из выражения (3) видно, что яркость вуалирующей подсветки является функцией одной переменной и не зависит от яркости (или отражательной способности) объектов и ориентиров макета местности.
В предлагаемом имитаторе визуаль- 5 ной обстановки процесс формирования сигнала вуалирующей подсветки в соответствии с (3) осуществляется следующим образом.
Макеты местности 1 по конфигурации и рельефу выполняются аналогичными, но макет 1 окрашивается красителем одного тона, т.е. при равномерном его освещении яркость всех его точек одинакова. В этом случае яркость любой его точки зависит только от интенсивности ее освещения. . усть i лампа освещения 8, соответствующая i-той лампе освещения 2,
размещена над точкой дополнительного макета местности 1.1 с координа
, а телекамера 4, как 3, имеет координаты х
и
г
с датчика 10, пропорциоW
J5
нальный координате у, и сигнал с датчика 11, пропорциональный координате х, поступают на входы каждого из каналов формирователя 9. Как указано выше, формирователь 9 осуществляет вычисление расстояния L,; по формуле (5), Вычисленное значение L,; далее , Icпoльзyeтcя для вычисления величины вуалирующей подсветки в соответствии с выражением (3), соответствующей наблюдению i -той точки моделируемой местности. .Далее полученное значение подается на блок 7 регулировки i -той , лампы 8, за счет чего обеспечивается соответствие яркости вуалирующей подсветки соответствующей точке моделируемой местности выражению (3). Во всех каналах формирователя 9 че- 25
20
Очевидно, что если при помощи сум- матора 12 видеосигналов произвести сложение видеосигналов, формируемых телекамерами 5 и 9, то на видеоконтрольном блоке 13 наблюдается картина моделируемой местности, яркость каждой точки которой подчиняется выражению (А), т.е. осуп ествляется имитация ухудшения врщимости точек местности, соответствующая случаю наблюдения в сложных метеоусловиях.
Структура каналов формирователя при их построении на узлах аналоговой техники определяется выражениями (5) и (2) для каналов, определяющих яркость свечения ламп 2 и вьфажениями (5) и (3) для каналов, определяющих яркость свечения дамп 8.
Напряжения, пропорциональные коор- .динатам телекамеры 3 к, у, подаваемые с датчиков 10 и 1, в элементах 8 и 19 вычитаются из заданных
для данных блоков величин , у со- рез блоки 7, связанные с остальными ответственно (величины х;, у зада- лампами 8, осуществляются аналогичные j настройке элементов 18 и 19 вычисления применительно к координа- при помощи подключенных к их свобод- там точек моделируемой местности, ным входам регулирующих элементов - над которыми расположены упомянутые ЗО делителей, напряжения в соответствии лампы 8, в результате чего дополни- с координатами конкретной лампы 2,
на которую нагружен данный канал). Далее подученные напряжения возводят- ся в квадрат в блоках 20 и 21, после 35 чего суммируются в сумматоре 14. На выходе элемента 15 вычисления корня квадратного напряжение пропорционально текущему значению дальности от телекамеры 3 до точки макета 1, на- 40 ходящейся под i-той лампой 2.
тельный макет местности 1.1 освещается с переменной интенсивностью, зависящей от расстояния между телекамерой 4 и освещаемой точкой. Если в этом случае телекамеру 4 подключить к видеоконтрольному блоку 13, то воспроизводимая на его экране картина имеет переменную яркость, подчиняющуюся выражению (3) и имеющую более; высокую величину для точек изображения, соответствующих удаленным объектам, и спадающую по мере приближения к телекамере 4. При перемещении телекамеры 4 приводами 5 и 6 ее координа- ты Х-, у изменяются, в соответНаличие элемента 22 вычитания обусловлено разницей в формулах (2) и (3)..
Формула изобретения
ствующих каналах формирователя 9 происходит процесс вычисления В, для всех точек макета 1.1, над которыми
расположены лампы 8. Яркость свече- I
ния ламп 8 изменяется, а соответственно меняется и яркость точек макета местности 1.1, в соответствии с текущими значениями дальности до них и выражением (3). Так в предлагаемом имитаторе осуществляется воспроизведение увеличения яркости вуали- рующей подсветки по мере увеличения
1. Имитатор визуальной обстановки тренажера транспортного средства, corn держащий первый макет местности, рас- положенные над ним источники света, телевизионную камеру с приводами ее продольного и поперечного перемещения и видеоконтрольный блок, отличающийся тем, что, с целью повьпаения точности за счет моделирования ухудшения видимости в сложных метеоусловиях, он снабжен вторым, аналогичным вышеуказанному по конфи55
5
5
0
дальности наблюдения в соответствии с выражением (3).
Очевидно, что если при помощи сум- матора 12 видеосигналов произвести сложение видеосигналов, формируемых телекамерами 5 и 9, то на видеоконтрольном блоке 13 наблюдается картина моделируемой местности, яркость каждой точки которой подчиняется выражению (А), т.е. осуп ествляется имитация ухудшения врщимости точек местности, соответствующая случаю наблюдения в сложных метеоусловиях.
Структура каналов формирователя при их построении на узлах аналоговой техники определяется выражениями (5) и (2) для каналов, определяющих яркость свечения ламп 2 и вьфажениями (5) и (3) для каналов, определяющих яркость свечения дамп 8.
Напряжения, пропорциональные коор- .динатам телекамеры 3 к, у, подаваемые с датчиков 10 и 1, в элементах 8 и 19 вычитаются из заданных
Наличие элемента 22 вычитания обусловлено разницей в формулах (2) и (3)..
Формула изобретения
1. Имитатор визуальной обстановки тренажера транспортного средства, corn держащий первый макет местности, рас- положенные над ним источники света, телевизионную камеру с приводами ее продольного и поперечного перемещени и видеоконтрольный блок, отличающийся тем, что, с целью повьпаения точности за счет моделирования ухудшения видимости в сложных метеоусловиях, он снабжен вторым, аналогичным вышеуказанному по конфи55
гурации, макетом местности, расположенными над ним дополнительными источниками света, дополнительной теле визионной камерой, связанной с приводами продольного и поперечного перемещения, сумматором видеосигналов, датчиками положения приводов, форми- .рователем управляющих сигналов и блоками регулировки яркости источников света, соединенными входами с соответствующими выходами формирователя управляющих сигналов, входы которого соединены с выходами соответствующих датчиков положения приводов, при этом выходы телекамер связаны с входами сумматора видеосигналов, выход которого связан с видеоконтрольным блоком.
2. Имитатор поп, , отличающийся тем, что формирователь управляющих сигналов содержит цепочки по количеству источников света, одни из которых выполнены на последовательно соединенных сумматоре, элементе вычисления корня квадратного, первом элементе перемножения, элементе вычисления экспоненты, втором зле- менте перемножения, выходы которых
5
0
5
являются выходами формирователя управляющих сигналов, связанными с источниками света Р1ад первым макетом местности, первом и втором элементе вычитания, выходы которых соединены с входами сумматора, а входы подключены соответственно к выходу третьего и четвертого элементов вычитания, а другие цепочки выполнены на последовательно соединенных втором сумматоре, втором элементе вычисления корня квадратного, третьем элементе перемножения, втором элементе вычисления экспоненты, пятом элементе вычитания и четвертом элементе перемножения, выходы которых являются выходами формирователя управляющих сигналов, связанными с источниками света над вторым макетом местности, щестого и седьмого элементов вычитания, выходы которых соединены с входами второго сумматора, а входы .с выходами соответственно восьмого и девятого элементов вычитания, при этом входы третьего, четвертого, восьмого и девятого вычитания являются соответствующими входами формирователя управляющих сигналов.
I 1Ы-да
to
Mli ( ЧЧ г ЧугУг)
L
fi--/frrWyr r; аг.г
i-innfc- f f rJvJVK-,;
KSmnyl яанпи1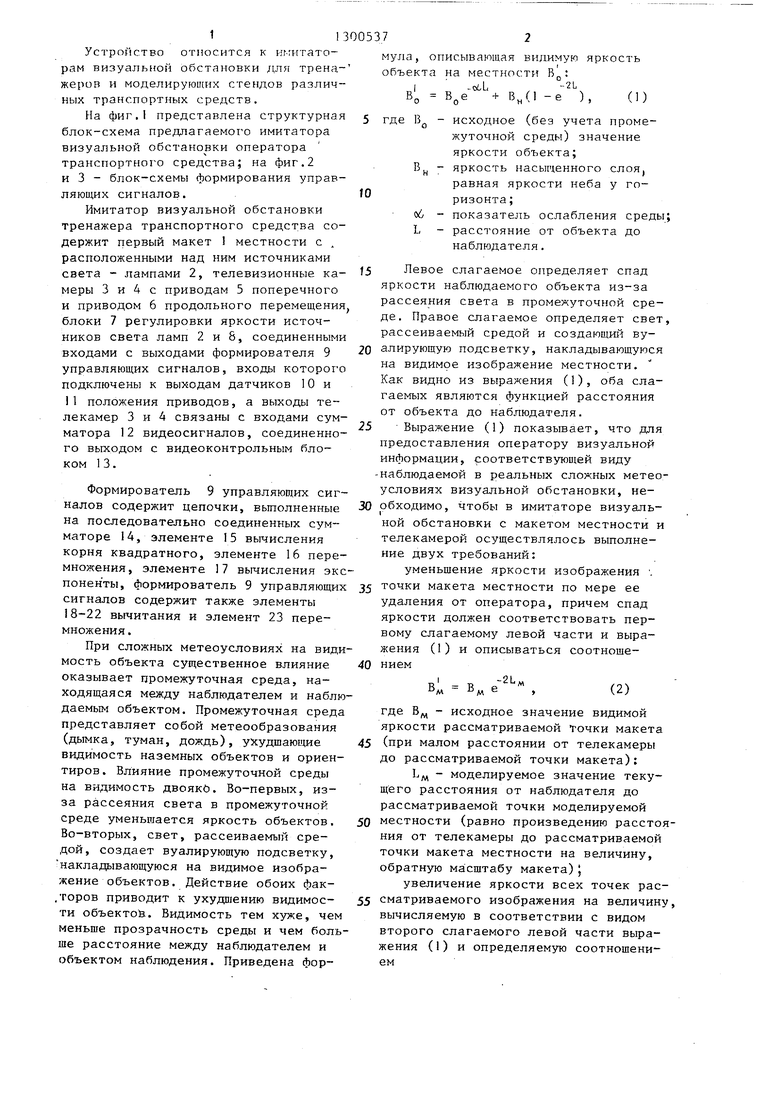

| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор визуальной обстановки на тренажере оператора транспортного средства | 1986 |
|
SU1390628A1 |
| Устройство для моделирования вождения | 1990 |
|
SU1737486A1 |
| Имитатор визуальной обстановки тренажера транспортного средства | 1985 |
|
SU1282188A1 |
| Имитатор визуальной обстановки оператора транспортного средства | 1988 |
|
SU1580420A1 |
| Устройство имитации визуальной обстановки тренажера оператора транспортного средства | 1981 |
|
SU1010641A1 |
| Устройство для моделирования работы оператора транспортного средства | 1986 |
|
SU1399802A1 |
| Устройство для моделирования работы оператора транспортного средства | 1987 |
|
SU1501127A1 |
| ТЕЛЕКАМЕРА НА ОСНОВЕ ФОТОПРИЕМНОЙ МАТРИЦЫ ПЗС | 1996 |
|
RU2129337C1 |
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| Имитатор визуальной обстановки тренажера транспортного средства (его варианты) | 1984 |
|
SU1302312A1 |
Изобретение относится к моделирующим стендам различных транспортных средств и обеспечивает точность имитации- за счет моделирования ухудшения видимости в сложных метеоусловиях. Имитатор содержит макеты 1 мест ности с расположенными над ними источниками света - лампами 2, 8, телевизионные камеры 3 и 4 с приводами 5 и 6 соответственно поперечного и продольного перемещений, выходы которых связаны с входами сумматора 12 видеосигналов, соединенного выходом с входом видеоконтрольного блока 13. Устройство содержит блоки 7 регулировки яркости ламп 2, 8, соединенные с входами с выходами формирователей 9 управляющих сигналов, входы которых подключены к выходам датчиков 1 О и 11 положения приводов. Макеты 1 освещаются с переменной интенсивностью, зависящей от расстояния между телекамерой 3 и освещаемой точкой. Если в этом случае телекамеру 3 подключить к видеоконтрольному блоку 13, то изображение макета местности будет иметь переменную яркость. 1 з.п. ф-лы, 3 ил. о (Л о о ел Од ei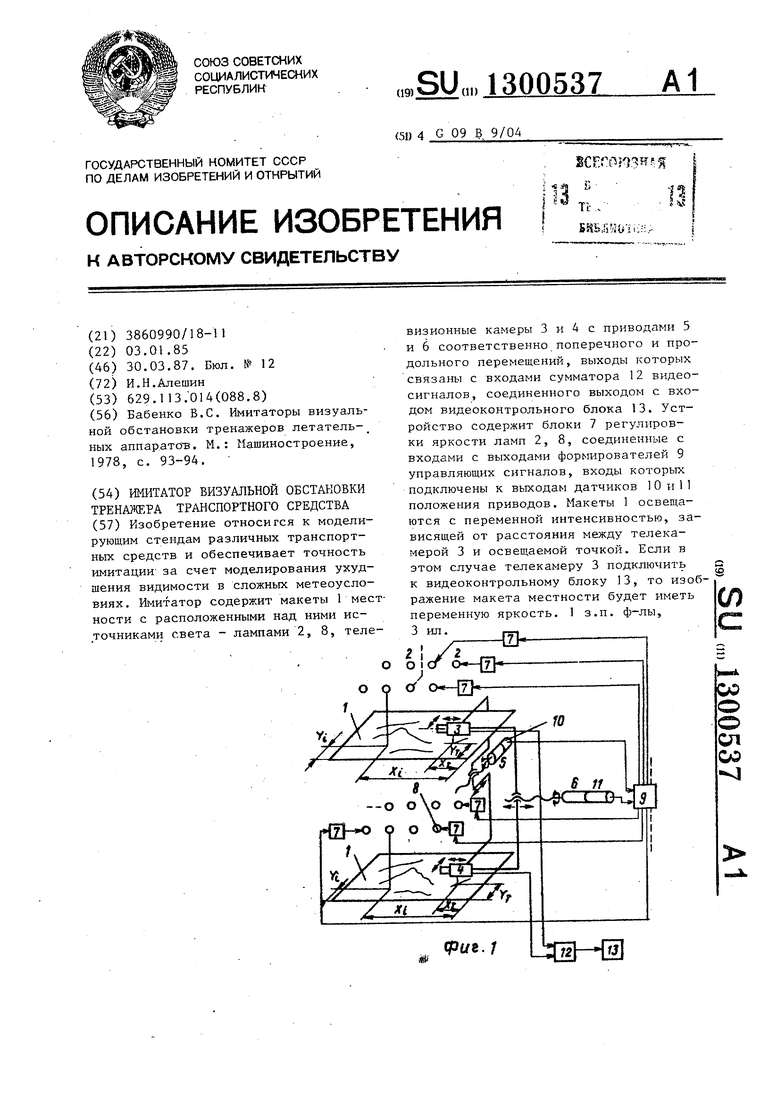
Редактор П.Горват
Составитель Л.Резникова Техред А.Кравчук
Заказ 1155/51Тираж 434Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор С.Черни
| Бабенко В.С, Имитаторы визуальной обстановки тренажеров летатель- ных аппарато-в | |||
| М.: Машиностроение, 1978, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
