Изобретение относится к тренажерной технике, в частности к имитаторам визуальной обстановки операторов транспортных средств.
Цепью изобретения является расши- Ьение дидактических возможностей Имитатора со снижением расхода электроэнергии на освещение макета местности и повышением долговечности ленточного макета.
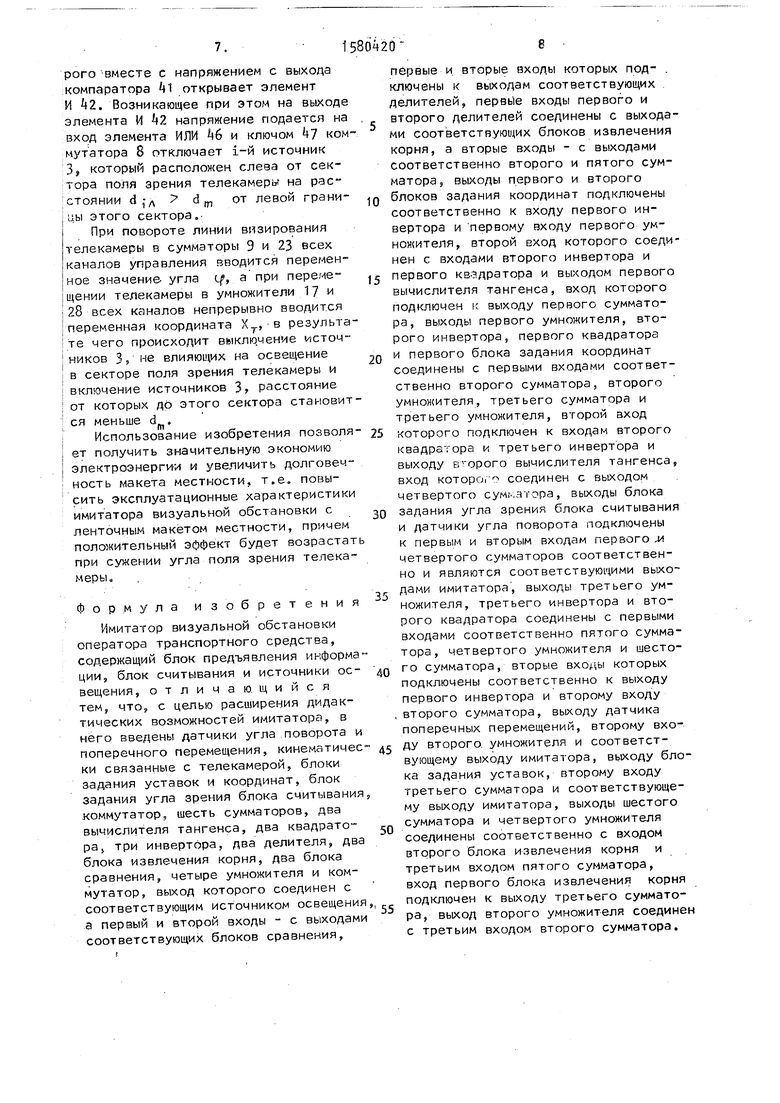
На фиг 1 показана общая структурная схема имитатора,- на фиг. 2 - геометрические построения, поясняющие вывод формулы и логических условий для выключения данного источника ос- вещения; на фиг. 3 и k - схема построения блоков сравнения; на фиг.5 - схема коммутатора.
Имитатор содержит блок 1 предъявления информации, выполненный в виде бесконечной ленты, расположенный на ней на ее краю с возможностью поворота и поперечного перемещения блок
2считывания (телекамера), источники
3освещения, датчик k угла поворота, датчик 5 поперечного перемещения,
блок 6 задания угла зрения телекамеры, блок 7 уставок (единичного напряжения), коммутатор 8. При этом между датчиком k и входом коммутатора - 8 последовательно включены сумматор 9, соединенный с блоком 6, вычислитель 10 тангенса, умножитель 11, соединенный с блоком 12 задания координат (поперечных), сумматор 13, сое- диненный через инвертор k с блоком 15 задания координат (продольных), а через последовательно включенные инвертор 16 и умножитель 17 соединенный с датчиком 5 поперечного переме- щения, - с выходом вычислителя 10 тангенса, делитель 18, связанный также через последовательно соединенные квадратор 19, сумматор 20, связанный
с блоком 7, и блок 21 извлечения корня, соединенный с выходом вычитате- ля 10 тангенса, блок 22 сравнения.
Между датчиком 5 и вторым входом коммутатора 8 последовательно включены сумматор 23, вычислитель 2k тангенса, умножитель 25, соединенный с блоком 12, сумматор 26, соединенный непосредственно с выходом инвертора 14, а чеоез последовательно включенные инвертор 27 и умножитель 28, сое- диненнь л с датчиком 6, - с выходом вычислить- я 2k тангенса, делитель 29, связанный через последовательно соединенные квадратор 30,сумматор 31, связанный с блоком 7, и блок 32 извлечения корня, соединенный с выходом вычислителя 2k тангенса, блок 33 сравнения. Вторые входы блоков 22 и 33 соединены с делителями 29 и 18 соответственно.
Блок 22 содержит последовательно соединенные двухполупериодные выпрямитель 3k, компаратор 35 и элемент И 36, при этом вход двухполупериодно- го выпрямителя 3 через включенный в прямом направлении однополупериод- ный выпрямитель 37 и элемент И 38 соединен с элементом И 36. При этом элемент И 38 через включенный в прямом направлении однополупериодный выпрямитель 39 соединен с входом блока 22.
Блок 33 содержит последовательно соединенные двухполупериодный выпрямитель 40, компаратор 41 и элемент И 42, при этом вход выпрямителя 40, являющийся входом блока 33, через включенный в обратном направлении однополупериодный выпрямитель A3 и элемент И kk соединен с элементом И 42. При этом элемент И kk через включенный в обратном направлении однополу5
периодный выпрямитель 5 соединен сL tgCt/1 - , а в последовательно
входом блока 33.включенных инверторе 27 и умножителе
На фиг. $ показана возможная схема28, также соединенном с датчиком 5,
коммутатора 8, который содержит пос-, формируется величина tg( o)X; J. ледовательно включенные двухвходовой элемент ИЛИ 46, входы которого являНа выходе инвертора , соединенного с блоком 15, формируется напряжение (- У). Таким образом на сумматор 13 полаются напряжения tg( t| -cOXj,
ются входами KOMMvraTopa 8, и электрический ключ (реле)
На выходе инвертора , соединенног с блоком 15, формируется напряжение (- У). Таким образом на сумматор 13 полаются напряжения tg( t| -cOXj,
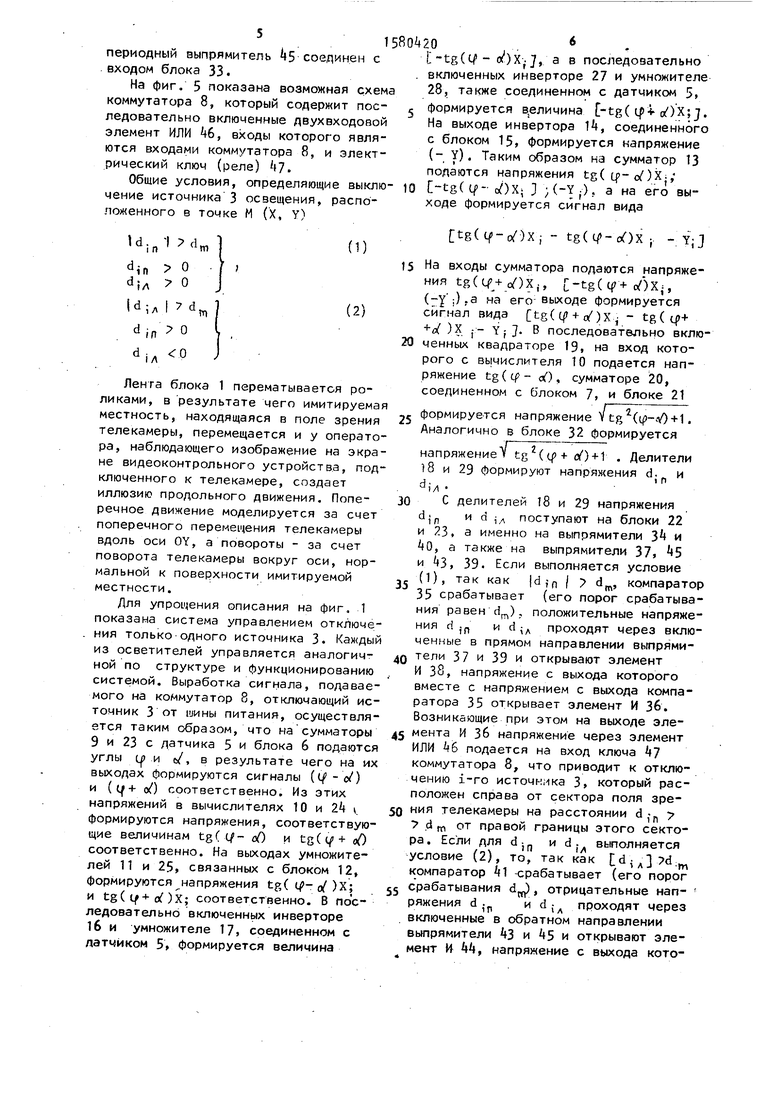
Общие условия, определяющие выклю- ю (ty оОХ; 3 ; (У ). а на его вычение источника 3 освещения, расположенного в точке М (X, У)
ходе формируется сигнал вида
4nl7d n 0
о id:« i 7 d
1Л
d,ff 7 О ё,л 0
m
Лен га блока 1 перематывается роликами, в результате чего имитируемая местность, находящаяся в поле зрения телекамеры, перемещается и у оператора, наблюдающего изображение на экране видеоконтрольного устройства, подключенного к телекамере, создает иллюзию продольного движения. Поперечное движение моделируется за счет поперечного перемещения телекамеры вдоль оси OY, а повороты - за счет поворота телекамеры вокруг оси, нормальной к поверхности имитируемой местности.
Для упрощения описания на фиг, 1 показана система управлением отключения только одного источника 3. Каждый
формируется величина tg( o)X; J.
На выходе инвертора , соединенного с блоком 15, формируется напряжение (- У). Таким образом на сумматор 13 полаются напряжения tg( t| -cOXj,
(ty оОХ; 3 ; (У ). а на его вы
25
ходе формируется сигнал вида
tgdf-om, - tg(()X j - YjJ
15 На входы сумматора подаются напряжения tg( I/ + /)Х,, -tg(if+ /)Х-, (гу ,).а на его выходе формируется сигнал вида tg( ц + У)Х , сй(ср+ +о( )Х ,-- у; J. В последовательно вклю20 ченных квадраторе 19, на вход которого с вычислителя 10 подается напряжение tg( oO, сумматоре 20, соединенном с блоком 7, и блоке 21
формируется напряжение V tg (ф-У)+1. Аналогично в блоке 32 формируется
напряжение tgz( У) + 1 . Делители 18 и 29 формируют напряжения d. и
dM
С делителей 18 и 29 напряжения
djn и d 1Л поступают на блоки 22
и 23, а именно на выпрямители 3 и 0, а также на выпрямители 37, 5 и 3, 39. Если выполняется условие (1), так как |d;n / dm, компаратор 35 срабатывает (его порог срабатывания равен dn), положительные напряжения d jn и d ,Л проходят через включенные в прямом направлении выпрями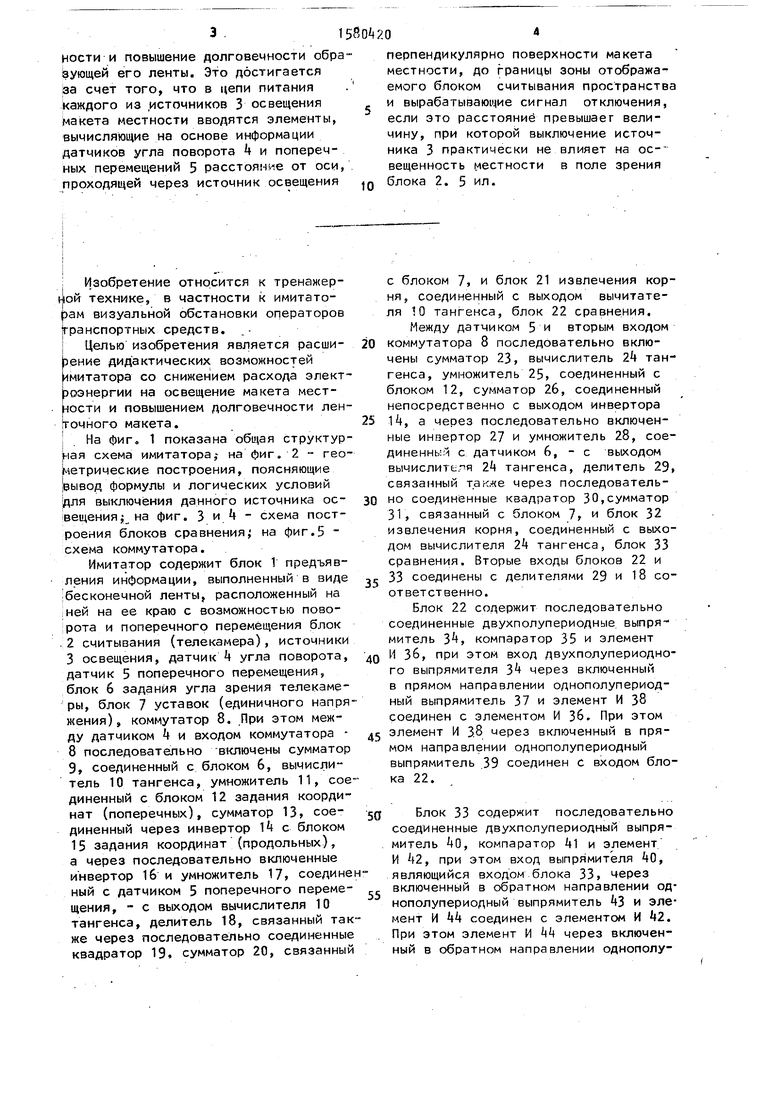
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Имитатор визуальной обстановки тренажера транспортного средства | 1985 |
|
SU1282188A1 |
| Устройство для определения импульсной переходной функции | 1985 |
|
SU1345175A1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1350802A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для ввода информации | 1980 |
|
SU955007A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Устройство для контроля качества канала связи с шумоподобными сигналами | 1989 |
|
SU1628210A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2249243C2 |

Изобретение относится к созданию исследовательских моделирующих комплексов и учебно-тренировочных средств операторов транспортных средств, в частности к имитаторам визуальной обстановки для моделирования зрительных эффектов, возникающих при движении транспортных средств. Цель изобретения - расширение дидактических возможностей имитатора, отличительной особенностью которого является снижение расхода электроэнергии на освещение макета местности. Имитатор содержит блок предъявления информации, блок считывания и источники освещения в него введены датчики угла поворота и поперечного перемещения, кинематически связанные с телекамерой, блоки задания уставок и координат, блок задания угла зрения блока считывания, коммутатор, шесть сумматоров, два вычислителя тангенса, два квадратора, три инвертора, два делителя, два блока извлечения корня, два блока сравнения, четыре умножителя и коммутатор. 2 ил.
из осветителей управляется аналогич- до тели 37 и 39 и открывают элемент ной по структуре и функционированию И 38, напряжение с выхода которого
вместе с напряжением с выхода компаратора 35 открывает элемент И 36.
системой. Выработка сигнала, подаваемого на коммутатор 8, отключающий источник 3 от шины питания, осуществляется таким образом, что на сумматоры 45 мента И 36 напряжение через элемент 9 и 23 с датчика 5 и блока 6 подаются ИЛИ 6 подается на вход ключа 7
Возникающие при этом на выходе элеуглы ц и с/, в результате чего на их выходах формируются сигналы (ч/1 - оО и ( if + о) соответственно. Из этих напряжений в вычислителях 10 и 2k формируются напряжения, соответствующие величинам tg( if- оО и tg( соответственно. На выходах умножителей 11 и 25, связанных с блоком 12, формируются напряжения tg( (f- o( )X; и tg(t/+oOX; соответственно. В последовательно включенных инверторе 16 и умножителе 17, соединенном с датчиком 5, формируется величина
коммутатора 8, что приводит к отключению i-ro источника 3, который расположен справа от сектора поля зре50 ния телекамеры на расстоянии d-n у d ю от правой границы этого сектора. Если для d)n и d -л выполняется условие (2), то, так как компаратор 41 срабатывает (его порог
ее срабатывания d, отрицательные напряжения d . и d,-A проходят через включенные в обратном направлении выпрямители 43 и А5 и открывают элемент И й, напряжение с выхода котомента И 36 напряжение через элемент ИЛИ 6 подается на вход ключа 7
Возникающие при этом на выходе элемента И 36 напряжение через элемент ИЛИ 6 подается на вход ключа 7
коммутатора 8, что приводит к отключению i-ro источника 3, который расположен справа от сектора поля зрения телекамеры на расстоянии d-n у d ю от правой границы этого сектора. Если для d)n и d -л выполняется условие (2), то, так как компаратор 41 срабатывает (его порог
срабатывания d, отрицательные напряжения d . и d,-A проходят через включенные в обратном направлении выпрямители 43 и А5 и открывают элемент И й, напряжение с выхода кото15
20
рого вместе с напряжением с выхода компаратора 1 открывает элемент И 2. Возникающее при этом на выходе элемента Ц k, напряжение подается на вход элемента ИЛИ 6 и ключом 7 ком- мутатора 8 отключает i-й источник 3, который расположен слева от сектора поля зрения телекамера на расстоянии d-д У d от левой грани- .Q иы этого сектора.
При повороте линии визирования телекамеры в сумматоры 9 и 23 всех каналов управления вводится перемен- ное значение угла (/, а при перемещении телекамеры в умножители 17 и 28 всех каналов непрерывно вводится переменная координата Хт, в результате чего происходит выключение источников 3 не влияющих на освещение в секторе поля зрения телекамеры и включение источников 3, расстояние от которых до этого сектора становится меньше d .
Использование изобретения позволя- 25 ет получить значительную экономию электроэнергии и увеличить долговечность макета местности, т.е. повысить эксплуатационные характеристики имитатора визуальной обстановки с JQ ленточным макетом местности, причем положительный эффект будет возрастать при сужении угла поля зрения телекамеры
Формула изобретения -°
Имитатор визуальной обстановки оператора транспортного средства, содержащий блок предъявления информации, блок считывания и источники ос- до вещения, отличающийся тем, что, с целью расширения дидактических возможностей имитатора, в него введены датчики угла поворота и поперечного перемещения, кинематичес- 45 ки связанные с телекамерой, блоки задания уставок и координат, блок задания угла зрения блока считывания, коммутатор, шесть сумматоров, два вычислителя тангенса, два квадрате- ра три инвертора, два делителя, два блока извлечения корня, два блока сравнения, четыре умножителя и коммутатор, выход которого соединен с соответствующим источником освещения, а первый и второй входы - с выходами соответствующих блоков сравнения,
5
0
Q
5 Q
°
о 5
первые и вторые входы которых подключены к выходам соответствующих делителей, первь1е входы первого и второго делителей соединены с выходами соответствующих блоков извлечения корня, а вторые входы - с выходами соответственно второго и пятого сумматора, выходы первого и второго блоков задания координат подключены соответственно к входу первого инвертора и первому входу первого умножителя, второй вход которого соединен с входами второго инвертора и первого кв дратора и выходом первого вычислителя тангенса, вход которого подключен к выходу первого сумматора, выходы первого умножителя, второго инвертора, первого квадратора и первого блока задания координат соединены с первыми входами соответственно второго сумматора, второго умножителя, третьего сумматора и третьего умножителя, второй вход которого подключен к входам второго квадратора и третьего инвертора и выходу ь -орого вычислителя тангенса, вход которог ° соединен с выходом четвертого сум а гэра, выходы блока задания угла зрения блока считывания и датчики угла поворота подключены к первым и вторым входам первого м четвертого сумматоров соответственно и являются соответствующими выходами имитатора, выходы третьего умножителя, третьего инвертора и второго квадратора соединены с первыми входами соответственно пятого сумматора, четвертого умножителя и шестого сумматора, вторые входы которых подключены соответственно к выходу первого инвертора и второму входу .второго сумматора, выходу датчика поперечных перемещений, второму входу второго умножителя и соответствующему выходу имитатора, выходу блока задания уставок, второму входу третьего сумматора и соответствующему выходу имитатора, выходы шестого сумматора и четвертого умножителя соединены соответственно с входом второго блока извлечения корня и третьим входом пятого сумматора, вход первого блока извлечения корня подключен к выходу третьего сумматора, выход второго умножителя соединен с третьим входом второго сумматора.
« т и 4
/ / зрения телекамеры 2
л
Т(ХТ.УТ) Фиг. 2
41
Г
К б
W
«J
ФиеЛ
1гЈ
22
Фие.Э
К блоку 8
(V
1SL
LJ-
04
i.j
/г.5
| Бабенко B.C | |||
| Имитаторы внзуаль- | |||
| ной обстановки тренажеров летательных аппаратов | |||
| - М.: Машиностроение, 1978, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ( ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА , 2 | |||
