Изобретение относится к сельскому хозяйству, а именно к передвижным оросительным установкам.
Целью изобретения является повышение надежности работы дождевальной машины путем устранения возможности возникновения предельных углов ловорота пролетов, вызванных провисанием тросов синхронизации.
На чертеже представлена схема системы управления многоопорной дождевальной машины фронтального действия.
Система содержит блок 1 управления дождевальной машины, блоки 2 управления приводами опорных тележек, блоки 3 контроля времени поворота пролетов, блоки 4 контроля угла поворота пролетов, систему синхронизации, включающую трос 5 синхронизации, коромысла б, пролеты 7.
Первый выход блока 1 управления дождевальной машины связан с входом блока 2 управления приводом первой опорной тележки. Второй выход блока 1 управления связан с входами блоков 4 контроля угла поворота пролетов, кинематически связанных с коромыслами 6 системы синхронизации. Выходы блоков 4 контроля угла поворота пролетов связаны с входами блоков 2 управления приводами промежуточных опорных тележек. Выходы блоков 2 управления приводами тележек связаны с входами блоков 3 контроля времени поворота пролетов, установленных на собственной и последующей тележках. Выходы блоков 3 контроля времени поворота пролетов связаны с входом блока 1 управления дождевальной машины.
Система управления многоопорной дождевальной машины фронтального действия работает следующим образом.
С блока 1 управления дождевальной машины на вход блока 2 управления приводом крайней опорной тележки поступает сигнал движения дождевальной машины длительностью t. Крайняя опорная тележка начинает движение продолжительностью t. Через время iz первый пролет повернется на рабочий угол включения привода соседней промежуточной тележки.
Ь - f-iSa
где f-длина пролета; tga. - рабочий угол поворота пролета; V - скорость опорной тележки. После поворота первого промежуточного пролета включается привод следующей опорной тележки и т. д. Происходит перемещение пролетов дождевальной машины. При этом должно выполняться условие, .. При ослаблении натяжения троса 5 синхроСоставитель Л. Пантелеева
Редактор Л. ЛангазоТехред И. ВересКорректор М. Демчик
Заказ 920/2Тираж 630Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
низации коромысло 6 начнет поворачиваться и воздействовать на блок 4 контроля угла поворота пролета только после выбора движущимся пролетом «слабины троса.
Таким образом увеличивается время от начала движения пролета до срабатывания блока 4 контроля угла поворота пролета, включающего посредством блока 2 управления привод опорной тележки. Блок 3 контроля времени поворота пролета, установленный на время /2, дает при этом в блок 1 управления дождевальной машины сигнал о недостаточном натяжении троса 5 синхронизации на своем пролете. Если же трос натянут хорошо, то время поворота пролета
, меньше или равно /2, блок 2 управления приводом поворотной тележки отключает при своем включении блок 3 контроля времени поворота пролета, установленный на соседней опорной тележке.
Таким образом, наличие в системе уп0 равления дождевальной, машины дополнительно введенных блоков 3 контроля времени поворота пролетов увеличивает надежность работы, так как исключается возможность появления критических углов поворота пролетов, вызванных ослаблением натяже5 ния тросов 5 синхронизации.
Следует отметить, что возникновение критических углов поворота пролетов относительно друг друга влечет за собой появ- ление аварийного излома главного трубопровода дождевальной машины. Поэтому ликвидация возможности возникновения критических углов поворота пролетов играет важную роль в обеспечении безаварийной работы оросительной установки.
35
Формула изобретения
0
Система управления многоопорной дождевальной машины фронтального действия, содержащая блок управления дождевальной
0 машины, систему синхронизации, блоки контроля угла поворота пролетов и блоки управления приводами опорных тележек, отличающаяся тем, что, с целью повышения надежности работы дождевальной машины путем устранения возможности возникнове5 ния предельных углов поворота пролетов, вызванных провисанием тросов системы синхронизации, система управления дополнительно содержит блоки контроля времени поворота пролетов, установленные на каждой опорной тележке, выходы которых связаны с блоками управления приводами собст- венноЯ и последующей тележек, а выходы соединены с блоком управления дождевальной машины.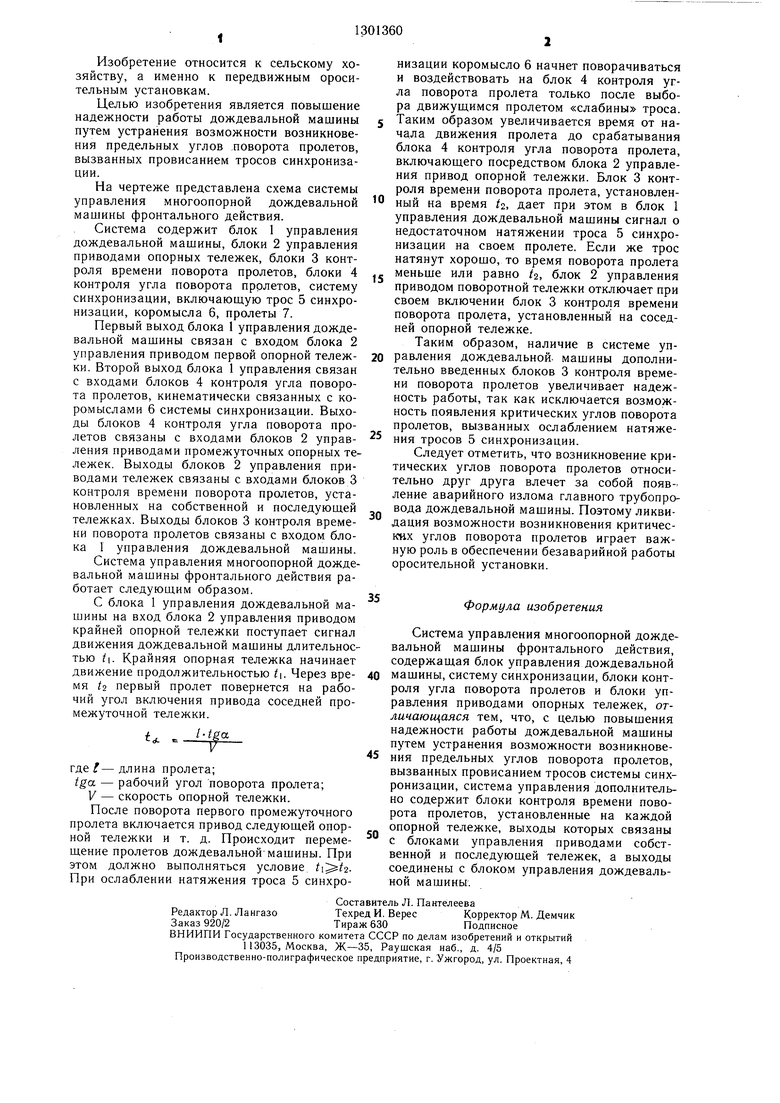
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА ФРОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2006 |
|
RU2334389C2 |
| Устройство определения угла поворота секции дождевальной машины кругового действия | 2019 |
|
RU2707919C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| Устройство автоматизированного управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1391544A1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| СИСТЕМА ПОДДЕРЖАНИЯ ПРЯМОЛИНЕЙНОСТИ ТРУБОПРОВОДА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2021 |
|
RU2763789C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2006 |
|
RU2345517C2 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА КРУГОВОГО ДЕЙСТВИЯ | 2015 |
|
RU2596130C1 |
Изобретение относится к сельскому хозяйству, а именно к передвижным оросительным установкам. Цель изобретения - повышение надежности работы дождевальной машины (ДМ). Система управления содержит блок 1 управления ДМ, блоки 2 управления приводами опорных тележек, блоки 3 контроля времени поворота пролетов, блоки 4 контроля угла поворота пролетов и систему синхронизации. В состав системы синхронизации входят трос 5 синхронизации, коромысла 6, пролеты 7. Наличие блоков 3 контроля времени поворота пролетов увеличивает надежность работы ДМ. Они исключают возможность появления критических углов поворота пролетов относительно друг друга, вызываюш,их излом главного трубопровода ДМ. Блок 1 управления ДМ включает приводы крайних опорных тележек. Приводы промежуточных опорных тележек включаются блоками 4 контроля угла поворота пролетов, кинематически связанными с коромыслами 6 системы синхронизации. 1 ил. о (Л оо с О5
| Штепа Б | |||
| Г | |||
| Справочник по механизации орошения | |||
| М.: Колос, 1979, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
| Дождевальная машина «Кубань | |||
| Руководство по эксплуатации ЭДМФ-ОООООРЭ | |||
| Ленинград, 1981. | |||
