Фиг. i
каждым из крыльев ДМ (правь;) и левым). Первоначальная установка поливной нормы, определяемой скоростью ДМ, поступает с блока управления скоростью ОМ. Анализатор 13 оценивает сигналы датчиков влагоемкости почвы под обоими крыльями ДМ, вырабатывая усредненный выходной сигнал. Блок логики управляет скоростью ДМ по
принципу соответствия скорости такому минимальрюму значению, при котором ны,Чается большая из требуемых норм полива (под правым или левым Kp ui Vvi ДМ) . Меньшая норма полива обеспечивается логическим блоком путем прикрытия задвижки 15 соответ- ;ствуюи его крьша ДМ. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1501986A1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1319802A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1410917A1 |
| Дождевальная система | 1986 |
|
SU1471994A1 |
| УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ С ОДНОВРЕМЕННЫМ ВНЕСЕНИЕМ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2019 |
|
RU2726542C1 |
| Устройство управления многоопорной дождевальной машины | 1985 |
|
SU1281213A1 |
| Устройство управления электрофицированной дождевальной машиной | 1988 |
|
SU1547783A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повьш)ение качества управления путем коррекции скорости движения и вьща- ваемой поливной нормы каждым из крыльев дождевальной машины (ДМ). Устройство включает гидрозадвижки 15 с приводом 17, подключенным через логический блок 18 и анализатор 13 к приемному коммутатору 8, установленному на ДМ. Последний при движении ДМ периодически входит в контакт с полевым коммутатором, к которому подключены датчики влагосостояния почвы и задатчики нормы полива под
Изобретение относится к сельскому хозяйству, а именно к манинам и орошению с/х культур широкозахватными дождевальными машинами (ДМ), и может быть использовано в устройствах автоматического управления поливом много опорными ДМ с учетом вида культур и динамики технологичоског о процесса орошения.
Целью изобретения является повышение качества управления путем коррекции скорости движения и выдаваемой поливной нормы каждыь из крыльев MauiHHbi.
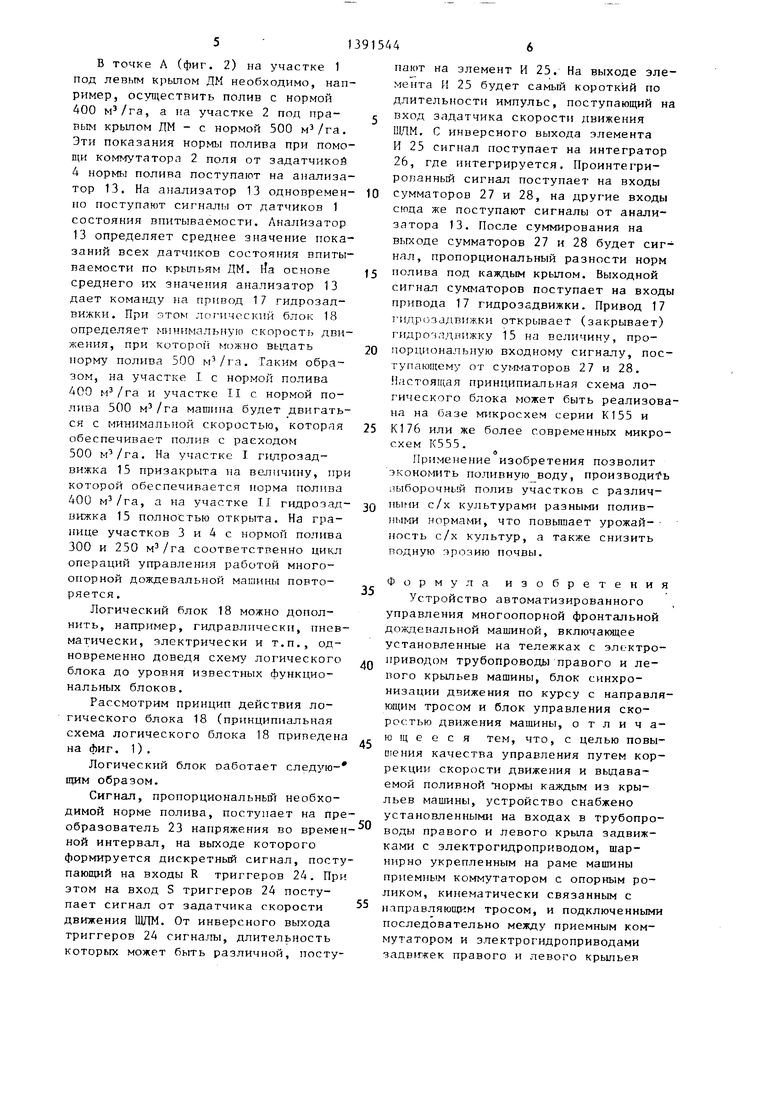
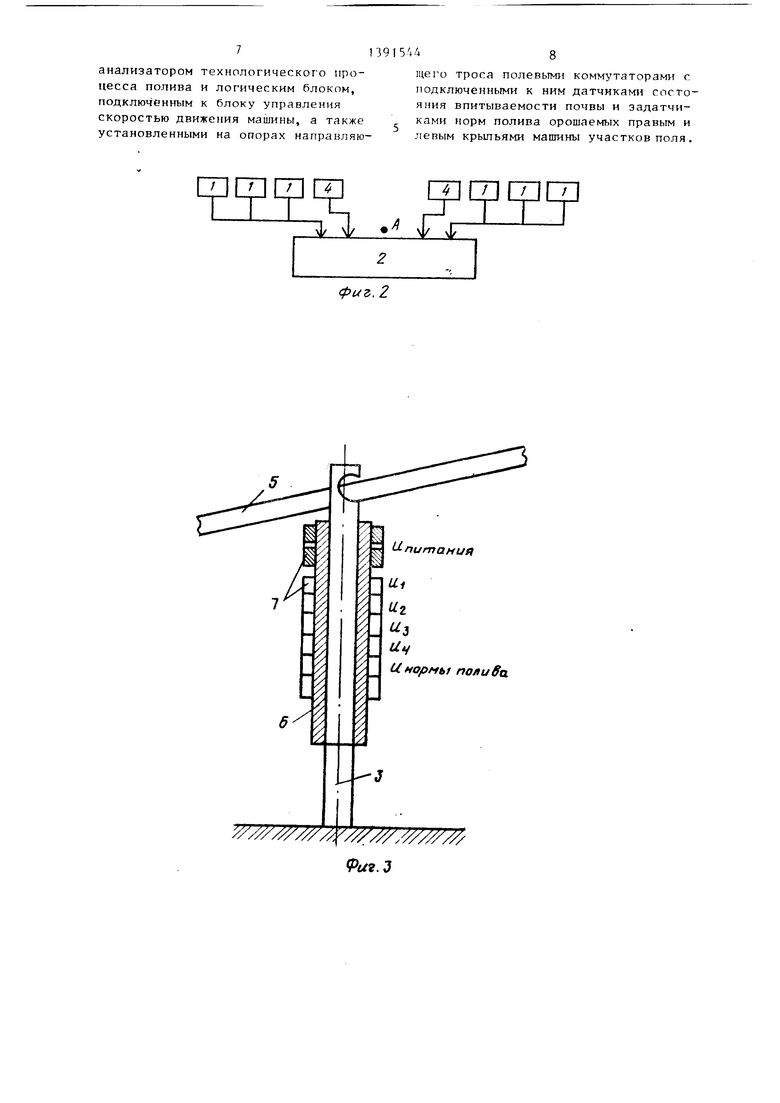
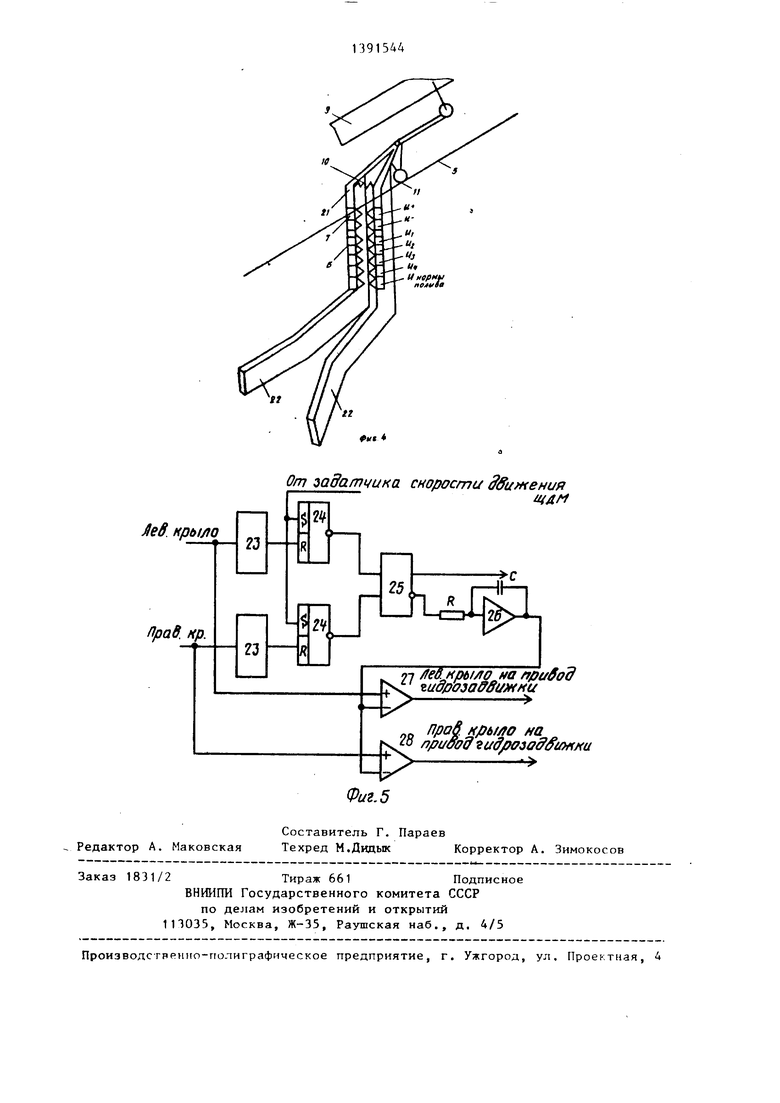
На фиг. 1 приведена блок-схема устройства (без полевого коммутатора); на фиг, 2 - схема установки датчиков состояния впитываемости на почве и задатчиков норм полива на оро- шаемом поле; на фиг. 3 - конструкция полевого коммутатора; на фиг. 4 - конструкция приемного коммутатора; на фиг. 5 - пример реализации логического блока (принципиальная элект- рическая схема).
Устройство включает (фиг. 1 и 2) датчики 1 состояния впитываемости почвы, которые определяют агротехническое состояние поля. Па орошаемом поле в зависимости от физико-механических свойств почвы и растущей на ней с/х культуры меняется его впиты- ваемость.
Датчики 1 состояния впитываемости устанавливают на орошаемом поле равномерно под каждым крылом (левое и правое), где необходимо изменять норму полива (например, под каждым крылом установлено по три датчика). Пример различных поливных норм на участках орошаемого поля под каждым
из крыльев многоопорной фронтальной люжлевяльной машины (ДМ) приведен на фиг. 2. Электрические сигналы от датчиков впитываемости поступаю на полевой коммутатор 2, который установлен в стойке 3 опоры направлющего троса.
Датчик 1 состояния впитываемости представляет собой измеритель,злект рическое напряжение на выходе которго прямо пропорционально состоянию рпитынаемости орошаемого участка поля. Задатчик 4 HopMiii полива служи для задания дождевальной машине необходимой скорости движения. Он устанавливается ближе к направляющему тросу 5 под каждым крылом (левым п правым) и состоит из делителя напряжения, выполненного на одном потенциометре, градуировка которого соответствует заданной норме по.пива
На стойке 3 опоры направляющего троса 5 устанавливается 6 из неэлектропроводного материала (фиг. 4).
Коммутатор 2 поля представляет собой контактные площадки 7, соединенные со всеми датчиками 1 состояния впитываемости правого и левого крыльев а также с задатчиками 4 нормы полива при помощи соединительных приводов. Контактные площадки 7 изолированы между собой и установлены на стойке 3 на фиксированной высоте.
Приемный коммутатор 8 на ДМ предназначен для съема показаний с датчиков 1 состояния спитываемости и задатчиков 4 нормы полива обоих крыпьев через полевой коммутатор 2.
Ком татор 8 1ЩМ устанавливается на блоке 9 (раме ДМ) блока синхронизаци над направляюа им тросом 5, закрепляется на ней на пружинных подвесках 10 и катится по направляющему тросу 5 на ролике 11. Такая конструкция позволяет избежать несогласованного соединения приемного коммутатора 8 ДМ с полевым коммутатором 2. Пружинная подвеска 10 и ролик 1 1 позволяют исключить влияние рельефа на точност установки ДМ по отношению к опоре 3 и боковое отклонение линии ДМ от направляющего троса 5.
Блок 12 ручного управления предназначен для ручного управления движением ДМ и, когда нет необходимости управлять машиной по программе, отключает всю автоматику.
Анализатор 13 механического процесса полива состоит из сумматора сигналов, которые поступают от датчиков 1 состояния впитываемости (соответственно от левого и правого крыла), и усилителя для усиления сигнала и задатчика 4 нормы полива. Анализатор 13 предназначен для определения среднего значения поливной нормы воды с учетом показаний датчиков 1 состояния впитываемости и заданных норм полива.
Задатчик 4 нормы полива служит для задания дождевальной машине скорости движения, вьщачи требуемой для данной культуры нормы полива, и устанавливается ближе к направляющему тросу под каждым крылом. Он состоит из делителя напряжения, выполненного на одном потенциометре, градуировка которого соответствует данной норме полива. Блок 14 управления скоростью движения ДМ выполнен в виде таймера. В зависимости от соотношения времени работа-пауза скорость ДМ регулируется в широких пределах и, как следствие, регулируется норма полива.
Задвижки 15 предназначены для
дросселирования напорной оросительной gn полива.
воды в трубопроводе 16 питания дожде- После поступления сигналов на привальной машины и дают возможность управлять расходом воды в правом и левом крыпьях ДМ. Приводы 17 гидрозадвижек 15 состоят из электродвигателей, которые при включении приводит к перемещению гидрозадвижек 15. Логический блок 18 вьфабатьгеает команды на электрогидропривод 17 за
движек 15 и одновременно изменяет скорость движения ДМ, определяя необходимую скорость движения. Логический блок 18 представляет собой устройство, которое определяет ту №1нимальную скорость движения, при которой происходит полив в пределах необходимой нормы.
10
С учетом заданных норм полива под каждым крылом (левым и правым) определяется как необходимая скорость движения крайних тележек 19, так и
5 необходимая величина дросселирования задвижками 15 того крыла машин (правого или левого), где необходима меньшая норма полива.
Питающий насос 20 служит для подачи
0 оросительной воды через гидрозадвижку 1 5 в требопровод 16 питания. Приемный коммутатор 8 на ДМ выполнен в виде токосъемньтх контактов, установленных вертикально на изоляцион5 ных пластинах 21. Пластины снабжены направляющими 22, выполненными в виде вилки и служащими для захвата полевого коммутатора 2 при движении машины.
Устройство aвтoмaтизиpoвaннo o управления многоопорной ДМ работает следуюпщм образом.
В блоке 14 управления скоростью движения ДМ устанавливается начальная норма полива, например 600 . Передвигаясь, ДМ подходит к началу участка поля (фиг. 2, точка А). Пластины 21 и направляющие 22 приемного коммутатора 8 ДМ, взаимодействуя со
0 стойкой 3, обеспечивают надежное
соединение (разъемнбе) коммутатора 8 с коммутатором 2.
По достижении ДМ точки А через контактные площадки 7 подается элект5 рическое питание на датчики 1 состояния впитываемости и задатчики А полива, а также осуществляется съем сигналов с датчиков 1 состояния впи- тываемости и задатчиков 4 нормы
0
5
емньй коммутатор 8 анализатор 13 и логический блок 18 вырабатьгоают команду на электропривод 17 гидрозад- gg вижки, который открывает ее полностью. Скорость крайних тележек 19 зависит от нормы полива, так как производительность питающего ДМ насоса 20 постоянна.
В точке А (фиг. 2) на участке 1 под левым крылом ДМ необходимо, например, осуществить полив с нормой 400 м /га, а на участке 2 под правым крылом ДМ - с нормой 500 . Эти показания нормы полива при помощи коммутатора 2 поля от задатчикой 4 Hophtt. полива поступают на анализатор 13. На анализатор 13 одновременно поступают сигналы от 1 состояния впитываемости. Анализатор 13 определяет среднее значение показаний всех датчиков состояния впитываемости по крыльям ДМ. rfa основе среднего их значения анализатор 13 дает команду на привод 17 гидрозадвижки. При этом логический блок 18 определяет минимальную скорость движения, при которой М(;жно вьдать норму полива 500 . Таким образом, на участке I с нормой полива AGO м /га и участке II с нормой полива 500 м /га машина будет двигаться с минимальной скоростью, которая обеспечивает полив с расходом 500 . На участке I гидрозад- Бижка 15 призакрыта на величину, при которой обеспечивается норма полива 400 м /га, а на участке II гидрозадвижка 15 полностью открыта. На границе участков 3 и 4 с нормой полива 300 и 250 м /га соответственно цикл операций управления работой многоопорной дождевальной машины повторяется .
Логический блок 18 можно дополнить, например, гидравлически, пневматически, электрически и т.п., одновременно доведя схему логического блока до уровня известных функциональных блоков.
Рассмотрим принцип действия логического блока 18 (принципиальная схема логического блока 18 приведена на фиг. 1).
Логический блок работает следую- щим образом.
Сигнал, пропорциональный необходимой норме полива, поступает на пре10
15
20
25
30
35
40
45
пают ка элемент И 25. На выходе эле мента И 25 будет самый короткий по длительности импульс, поступающий н вход задатчика скорости движения 11ЩМ. С инверсного выхода элемента И 25 сигнал поступает на интегратор 26, где интегрируется. Проинтегрированный сигнал поступает на входы сумматоров 27 и 28, на другие входы сюда же поступают сигналы от анализатора 13. После суммирования на выходе сумматоров 27 и 28 будет сиг нал, пропорциональный разности норм полива под каждым крылом. Выходной сигнал сумматоров поступает на вход привода 17 гидрозадвижки. Привод 17 ги,п,р(:задвижки открывает (закрывает) гидрозлдвижку 15 на величину, пропорциональную входному сигналу, пос тупающему от сумматоров 27 и 28. .Настоящая принципиальная схема логического блока может быть реализов на на базе микросхем серии К155 и К176 или же более современных микро схем К555.
о
Применение изобретения позволит экономить поливную воду, производит 11ыборочный полив участков с различными с/х культурами разными полив- лыми нормами, что повьппает урожай- ность с/х культур, а также снизить водную эрозию почвы.
Формула изобретени
Устройство автоматизированного управления многоопорной фронтальной дождевальной машиной, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины, блок синхронизации движения по курсу с направля ющим тросом и блок управления скоростью движения машины, отличающееся тем, что, с целью повы тения качества управления путем коррекции скорости движения и выдаваемой поливной нормы каждым из крыльев машины, устройство снабжено установленными на входах в трубопро
образователь 23 напряжения во времен- воды правого и левого крыла задвижной интервал, на выходе которого формируется дискретный сигнал, поступающий на входы R триггеров 24. При этом на вход S триггеров 24 поступает сигнал от задатчика скорости движения ШДМ. От инверсного выхода триггеров 24 сигналы, длительность которых может быть различной, посту
0
5
0
5
0
5
пают ка элемент И 25. На выходе элемента И 25 будет самый короткий по длительности импульс, поступающий на вход задатчика скорости движения 11ЩМ. С инверсного выхода элемента И 25 сигнал поступает на интегратор 26, где интегрируется. Проинтегрированный сигнал поступает на входы сумматоров 27 и 28, на другие входы сюда же поступают сигналы от анализатора 13. После суммирования на выходе сумматоров 27 и 28 будет сигнал, пропорциональный разности норм полива под каждым крылом. Выходной сигнал сумматоров поступает на входы привода 17 гидрозадвижки. Привод 17 ги,п,р(:задвижки открывает (закрывает) гидрозлдвижку 15 на величину, пропорциональную входному сигналу, поступающему от сумматоров 27 и 28. .Настоящая принципиальная схема логического блока может быть реализована на базе микросхем серии К155 и К176 или же более современных микросхем К555.
о
Применение изобретения позволит экономить поливную воду, производит ь 11ыборочный полив участков с различными с/х культурами разными полив- лыми нормами, что повьппает урожай- ность с/х культур, а также снизить водную эрозию почвы.
Формула изобретения
Устройство автоматизированного управления многоопорной фронтальной дождевальной машиной, включающее установленные на тележках с электроприводом трубопроводы правого и левого крыльев машины, блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, отличающееся тем, что, с целью повы- тения качества управления путем коррекции скорости движения и выдаваемой поливной нормы каждым из крыльев машины, устройство снабжено установленными на входах в трубопро
ками с электрогидроприводом, шар- нирно укрепленным на раме машины приемным коммутатором с опорным роликом, кинематически связанным с направляющим тросом, и подключенными последовательно между приемным коммутатором и электрогидроприводами задвижек правого и левого крыльев
анализатором технологического процесса полива и логическим блоком, подключенным к блоку управления скоростью движения машины, а также установленными на опорах направляю(риг. 2
щего троса полевыми коммутаторами с подключенными к ним датчиками состояния впитываемости почвы и эадатчи- ками норм полива орошаемых правым и левым крыльями машины участков поля.
.
Й/г.Л
tl
От адатчика снорости
fUAM
Лев. крыло
Прав. пр.
Редактор А. Маковская
Составитель Г. Параев
Техред М.Дидык Корректор А. Зимокосов
и нврни поливе
77 /1ев.нры/1ома ffffuffod udpo3affffu)f(
00 Р° f JSb//to на
io npt/OOd iUff/ O3Off U f(
-
Фиг. 5
| Устройство управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1319802A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
