24 плотности, регулятор (Р) 18, клапан (К) 20 с коррекцией по плотности сгущенной пульпы (Д17). САР также включает контур регулирования рас- ,хода реагента в каждый сгуститель по плотности его слива: Д25 плотности, управляющий блок 23, К 33 реагента; контур регулирования расхода суспензии в каждый сгуститель с коррекцией по плотности его слива: Д22 расхода, Д 21 плотности, управляющий
Изобретение относится к способам автоматического управления процессом сгущения суспензии и может быть использовано в химической и других отраслях промьшшенности,
Цель изобретения - повьшение точности разделения суспензии.
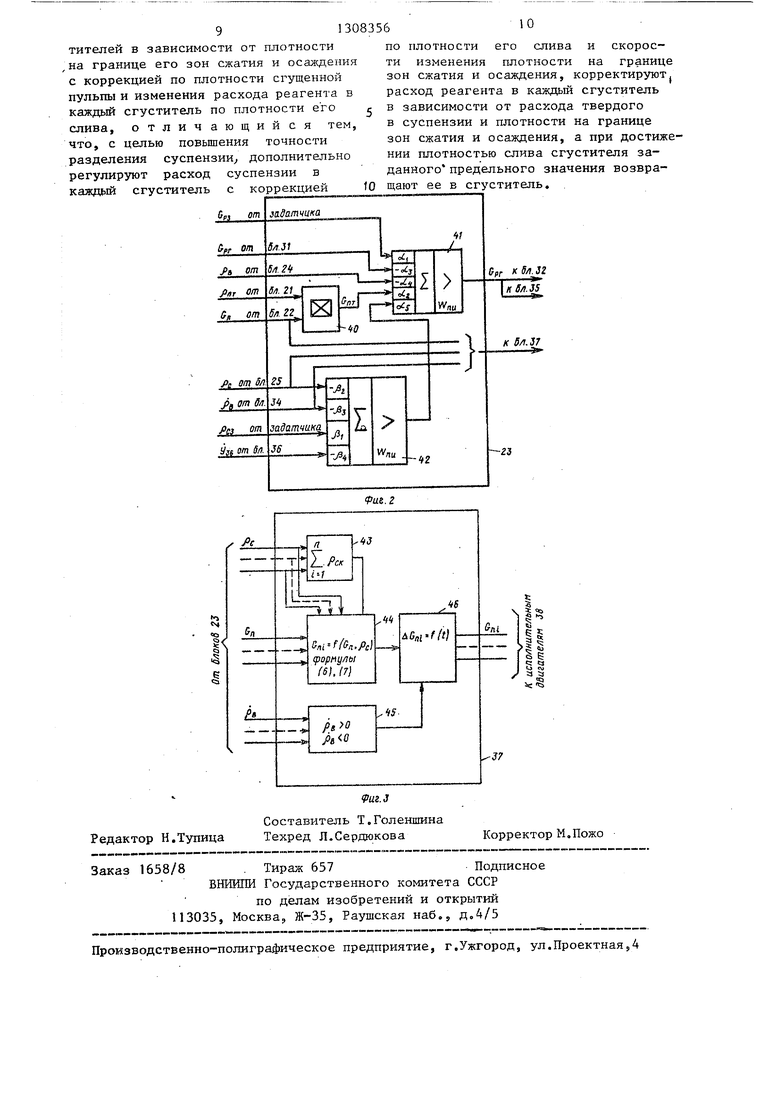
На фиго представлена принципиальная схема системы автоматического управления процессом сгущения суспензии; на фиг.2 - техническая структура управляющего блока; на фиг.З - техническая структура вычислителя,
Способ автоматического - травления процессом сгущения суспензии осуществляется следущим образом.
На сгустителе 1 установлен сливной желоб 2 для отвода осветленной сус пензии, к которому присоединен трубопровод 3 слива (фиг.). Разгрузка сгущенной суспензии в сгустителе 1 осуществляется с помощью вращающихся лопастей 4, укрепленных на валу 5 по -трубопроводу 6 разгрузки, Смеще ние суспензии питания и реагента производится в смесительном зумпфе Уу к выходу которого присоединен трубопровод 8 подачи суспензии пи тания в устройство питания сгустите- ля 9, К зумпфу 7 присоединен трубопровод 10 подачи суспензии питания . из распределительного зумпфа 11 все™ го отделения сгущения, к входу которого присоединен трубопровод 12 пода- чи основной суспензии, К зумпфу 7 присоединен также трубопровод 13 реагента и трубопровод 14 возврата сус08356
блок 23, вычислитель 37, К 39 с коррекцией по скорости изменения плотности на границе зон сжатия и осаждения (Д24), а также контур регулирования корректирующего расхода реагента в каждьш сгуститель в зависимости от расхода твердого в суспензии и плотности на границе зон сжатия и осаждения . Д 22 расхода, Д 24 плот - ности, управляющей блок 23, К 33, i 3 ил.
пензии слива в «сгуститель 1, В сгустителе 1 существует нечетко выраженная граница между зоной 15 осаждения и зоной 16 сжатия.
Датчик 17 плотности сгущенной суспензии через управляюш 1й блок 18 и исполнительный двигатель 19 регулирует положение разгрузочного клапана 20, Плотномер 21 и расходомер 22 связаны с управляющим блоком 23. Датчик 24 плотности на границе раздела зон 15 и 16 подключен к управляющему блоку 18 и управляющему блоку 23, Датчик 25 плотности суспензии слива подключен к блоку 26 переключения, выходной сигнал которого воздействует на исполнительные двигатели 27 и 28, установленные на клапанах 29 и 30.
Датчик 31 расхода реагента соедине с управляющим блоком 23, воздействующим на исполнительный двигатель 32, укрепленный на клапане 33 трубопровода 13 подачи реагента, К управляющему блоку 23 подключен также непосредственно и через корректирующий блок. 34 датчик 24 плотности суспензии внутри сгустителя 1 и датчик 25 плотности суспензии слива. Для исключения взаимного влияния к управляющим блокам 18 и 23 присоединены корректирующие блоки 35 и 36,
ч
Информация о нагрузке каждого из сгустителей 1 подана на вычислитель ,37, воздействующий на исполнительные двигатели 38.,, установленные на регулирующих клапанах 39 подачи суспен
313
зии питания в смесительные зумпфы 7 каждого сгустителя 1,
Входы вычислителя 37 присоединены к информационному выходу блока 23 управления и таким же выходам подобных блоков 23 управления других сгустителей 1.
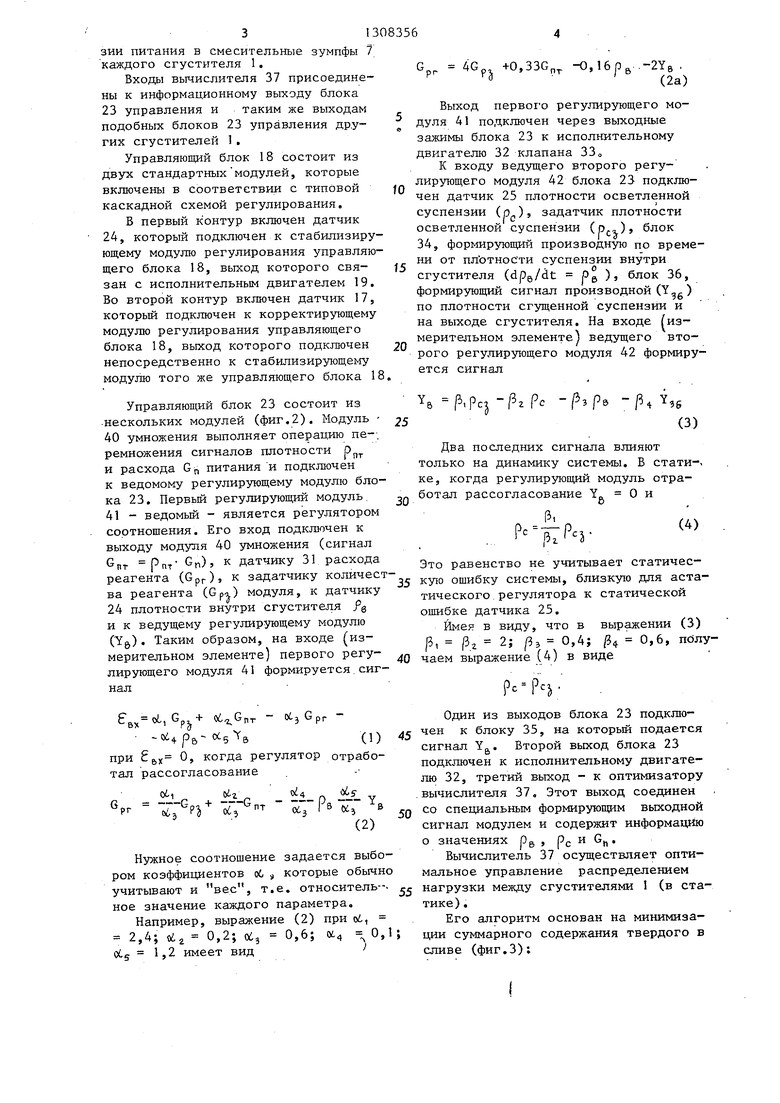
Управляющий блок 18 состоит из двух стандартных модулей, которые включены в соответствии с типовой каскадной схемой регулирования,
В первый к онтур включен датчик 24, который подключен к стабилизирующему модулю регулирования управляющего блока 18, выход которого связан с исполнительным двигателем 19. Во второй контур включен датчик 17, который подключен к корректирующему модулю регулирования управляющего блока 18, выход которого подключен непосредственно к стабилизирующему модулю того же управляющего блока 18
Управляющий блок 23 состоит из нескольких модулей (фиг.2). Модуль 40умножения выполняет операцию пе-; ремножения сигналов плотности Pj,
и расхода On питания и подключен к ведомому регулирующему модулю блока 23. Первьй регулирующий модуль.
41- ведомьш - является регулятором соотношения. Его вход подключен к выходу модуля 40 умножения (сигнал Gm- рпт- Gn), к датчику 31 расхода реагента (Gp), к задатчику количества реагента (Gp-i) модуля, к датчику 24 плотности внутри сгустителя Pg
и к ведущему регулирующему модулю (Yg). Таким образом, на входе (измерительном элементе) первого регулирующего модуля 41 формируется.сигнал
f.
- 063 G рг
(1)
при О, когда регулятор отработал рассогласование
об,
v
с,
Oi4
Oiff
n --г- Y I
(2)
Нужное соотношение задается выбором коэффициентов (Л , которые обычно учитывают и вес, т.е. относитель-- 5 ное значение каждого параметра.
Например, выражение (2) при о, 2,4; oia 0,2; ai, 0,6; ot,, 0,1; 065 Ij2 имеет вид
(
G 4G +0,33G, -0,16п..-2Ув (2а)
Выход первого регулирующего мо- дуля 41 подключен через выходные зажимы блока 23 к исполнительному двигателю 32 клапана 33
К входу ведущего второго регулирующего модуля 42 блока 23 подключен датчик 25 плотности осветленной суспензии (p,,)s задатчик плотности осветленной суспензии (р ), блок 34, формирующий производную по време
ни от пл отности суспензии внутри сгустителя ( Рв )) блок 36, формирующий сигнал производной (Y, ) по плотности сгущенной суспензии и на выходе сгустителя. На входе измерительном элементе ведущего второго регулирующего модуля 42 формируется сигнал
YB fi. -/3,ра -/, Y,g
(3)
Два последних сигнала влияют только на динамику системы. В стати-, ке, когда регулирующий модуль отработал рассогласование Y. О и
о
(3. -|зГР г
(4)
Это равенство не учитывает статическую ошибку системы, близкую для астатического регулятора к статической ошибке датчика 25.
Имея в виду, что в выражении (3) /, Рг 2; 0, 4 0,6, получаем выражение (4) в виде
PC 1 Один из выходов блока 23 подключен к блоку 35, на который подается сигнал Yg. Второй выход блока 23 подключен к исполнительному двигателю 32, третий выход - к оптимизатору .вычислителя 37, Этот выход соединен со специальным формирующим выходной сигнал модулем и содержит информацию о значениях рв Рс п
Вычислитель 37 осуществляет оптимальное управление распределением нагрузки между сгустителями 1 (в статике) .
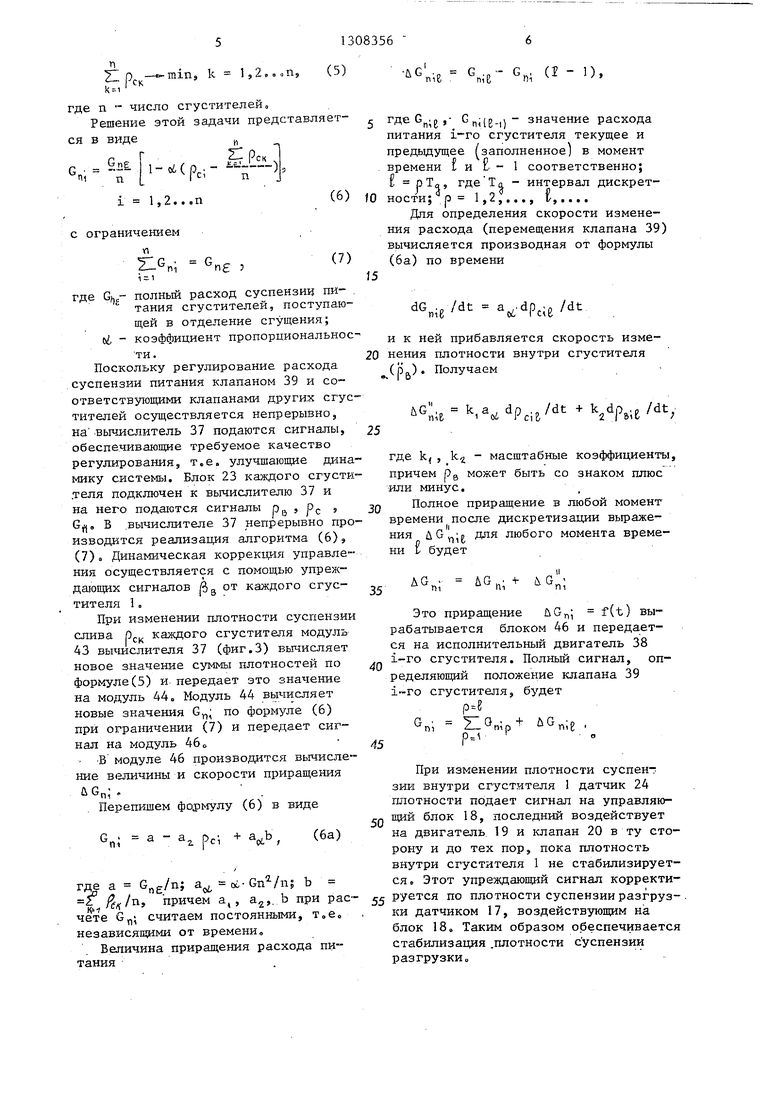
Его алгоритм основан на минимизации суммарного содержания твердого в сливе (фиг.З);
|Р«-minj k 1,2 «Hj (5)
где n - число сгустителей.
Решение этой задачи представляется в виде
c..- Р.
i 1,2.. о n
(6)
с ограничением
ni п :
(7)
где С,,„- полньш расход суспензии питания сгустителей, поступающей в отделение сгущения; Cii - коэффициент пропорциональнос ТИ.
Поскольку регулирование расхода . суспензии питания клапаном 39 и соответствующими клапанами других сгустителей осуществляется непрерывно, на -вычислитель 37 подаются сигналы, обеспечивающие требуемое качество регулирования, т.е. улучщающие динамику системы. Блок 23 каждого сгусти- .теля подключен к вычислителю 37 и на него подаются сигналы р,., s PC s G, В .вычислителе 37 непрерывно производится реализация алгоритма (6), (7)в Динамическая коррекция управления осуществляется с помощью упреждающих сигналов йц от каждого сгустителя 1.
При изменении плотности суспензии слива р(.| каждого сгустителя модуль 43 вы шслителя 37 (фиг.З) вычисляет новое значение суммы плотностей по формуле(5) и передает это значение на модуль 44 о Модуль 44 вычисляет новые значения С„; по формуле (6) при ограничении (7) и передает сигнал на модуль 46о
В модуле 46 производится вычисление величины и скорости приращения
UG,;, .
Перепишем формулу (6) в виде
а - а.
PC;
+ ,
(6а)
где а a.-ui- b , причем а,, а,.Ъ при расчете С„; считаем постоянными, Тов. независящими от времени,
Величина приращения расхода питания
nie
Hi
(I - 1),
где ,- G(,,(g.,j- значение расхода питания i-ro сгустителя текущее и предыдущее заполненное) в момент времени и L - 1 соответственно; i рТо, где Та - интервал дискретности; р 1,2,..., t,
Для определения скорости изменения расхода (перемещения клапана 39) вычисляется производная от формулы (6а) по времени
c dpae/ it.
и к ней прибавляется скорость изме- 20 нения плотности внутри сгустителя
(р,,). Получаем -ID
25
i Pciг/ Мрые/ Ь
где k,, k - масштабные коэффициенты,
причем РЦ может быть со знаком плюс или минус.
2Q Полное приращение в любой момент времени после дискретизации вьфаже- нин (1 для любого момента времени I будет
35
40
iG,;
Это приращение f(t) вырабатывается блоком 46 и передается на исполнительный двигатель 38 i-ro сгустителя. Полный сигнал, определяющий положение клапана 39 сгустителя, будет р4
G,i Z:0mp+ .
Р -о
45
При изменении плотности суспент ЗИН внутри сгустителя датчик 24 плотности подает сигнал на управляющий блок 18, последний воздействует на двигатель 19 и клапан 20 в ту сторону и до тех пор, пока плотность внутри сгустителя 1 не стабилизируется. Этот упреждающий сигнал корректиРУется по плотности суспензии разгруз-. ки датчиком 17, воздействующим на блок 18, Таким образом обеспечивается стабилизация .плотности суспензии разгрузки
При изменении плотности осветленной суспензии датчик 25 подает сигнал йа управляющий блок 23 и кор ректирует поддерживаемое этим блоком соотношение: количество реагента количество твердого в исходной суспензии. При корректировке сигнал так же, как сигнал поддерживания указанного соотношения, отрабатывается клапаном 33 под действием двигателя 32. Качество работы этой системы в динамике обеспечивается упреждающим сигналом по изменению плотности внутри сгустителя (датчик 24);
если плотность внутри сгустителя измнилась, это значит, что через некоторое время изменится плотность осветленной суспензии, так как последняя определяется количеством частиц твердого в восходящем потоке суспензии.
Действие клапана 33 в статике определяется выражением (2), если количество твердого () увеличивается, то увеличивается и расход реагента (Gpip),, если в связи с изменением параметров суспензии или реагента есть необходимость изменить заданное соотношение, оператор изменяет значение задания (Gp) или коэффициентов настройки модуля (ci, , к. 2. ...) и т.д. Сигнал от второго модуля 42 управления (Yg) определяется в статике выражением (4) и в динамике выражением (3).
Для повьппения точности стабилизадни плотности осветленной суспензии и одновременно для поддержания требуемой (регламентной) загрузки сгустителей 1 предусматривается управление всеми сгустителями 1 в зависимости от плотности суспензии слива
,) каждого из них с коррекцией
Р
(упреждающий сигнал)по скорости изменения плотности на границе зоны . сжатия и зоны осаждения (pg)«
При изменении плотности сусп-ензии слива какого-либо из сгустителей 1 вычислитель 37 перераспределяет питание между сгустителями 1 в соответствии с алгоритмом (6) и (7).
В случае достижения плотностью слива PJ. некоторого наперед заданного аварийного значения (уставки) датчик 25 подает сигнал на блок 26 переключения, который закрывает с помощью исполнительного двигателя 28 клапан 30, предотвращая потери
5
5
0
твердого со сливом сгустителя I и открывает с помощью исполнительного двигателя 27 клапан 29 на трубопроводе 14, возвращая осветленную суспензию обратно в сгуститель 1. При этом вычислитель 37 по сигналу от датчика 21. через блок 23 перераспределяет потоки суспензии по сгустителям 1. При снижении плотности осветленной суспензии блок 26 переключения действует в обратном порядке - закрывает клапан 29 и открывает клапан 30.
П р и м е.р. В суспензии питания сгустителя изменился гранулометрический состав, т.е. увеличилось количество частиц твердого крупного класса. В этом случае плотность суспензии на границе зоны сжатия и зо- 0 ны осаждения увеличивается и блок 18 через двигатель 19 и клапан 20 увеличивает расход суспензии разгрузки, блок 23 через двигатель 32 и клапан 33 увеличивает расход реагента, блок 34 дифференцирует сигнал от датчика 24 и передает его через блок 23 на вычислитель 37. Последний через двигатель 38 и клапан 39, работая от датчика 24 в режиме упреждения, снижает расход суспензии питания на данный сгус- ; титель. Вычислитель (фигоЗ) решает уже в статике оптимальную задачу перераспределения нагрузки и посыла 35 ет на все сгустители соответствующие команды. Блоки 35 и 36 компенсируют взаимные возмущения подсистем стаби- i лизации плотности суспензии разгруз- . ки и слива. После воздействия датчи-
40 ка 17 плотности суспензии слива происходит стабилизация плотности сус-, пензии разгрузки, а сигнал датчика 25 плотности обеспечивает стабилизацию плотности суспензии слива. Окон45 чательное распределение нагрузки между сгустителями производится вычислителем 37 после окончания пере- , ходных процессов, вызванных указанным возмущением в рассматриваемом 50 сгустителе.
30
Формула изобретения
Способ автоматического управления процессом сгущения суспензии в группе параллельно включенных сгустителей путем изменения расхода сгущенной пульпы на выходе каждого из сгустителей в зависимости от плотности ,на границе его зон сжатия и осаждения с коррекцией по плотности сгущенной пульпы и изменения расхода реагента в каждый сгуститель по плотности его слива, отличающийся тем, что, с целью повьшения точности разделения cycпeнзии дополнительно регулируют расход суспензии в сгуститель с коррекцией
по плотности его слива и скорости изменения плотности на границе зон сжатия и осаждения, корректируют, расход реагента в каждый сгуститель в зависимости от расхода твердого в суспензии и плотности на границе зон сжатия и осаждения, а при достижении плотностью слива сгустителя заданного предельного значения возвращают ее в сгуститель.
Hf) от
Редактор Н.Тупица
fui.J
Составитель Т.Голеншина Техред Л.Сердюкова
Заказ 1658/8 . Тираж 657Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор М.Пожо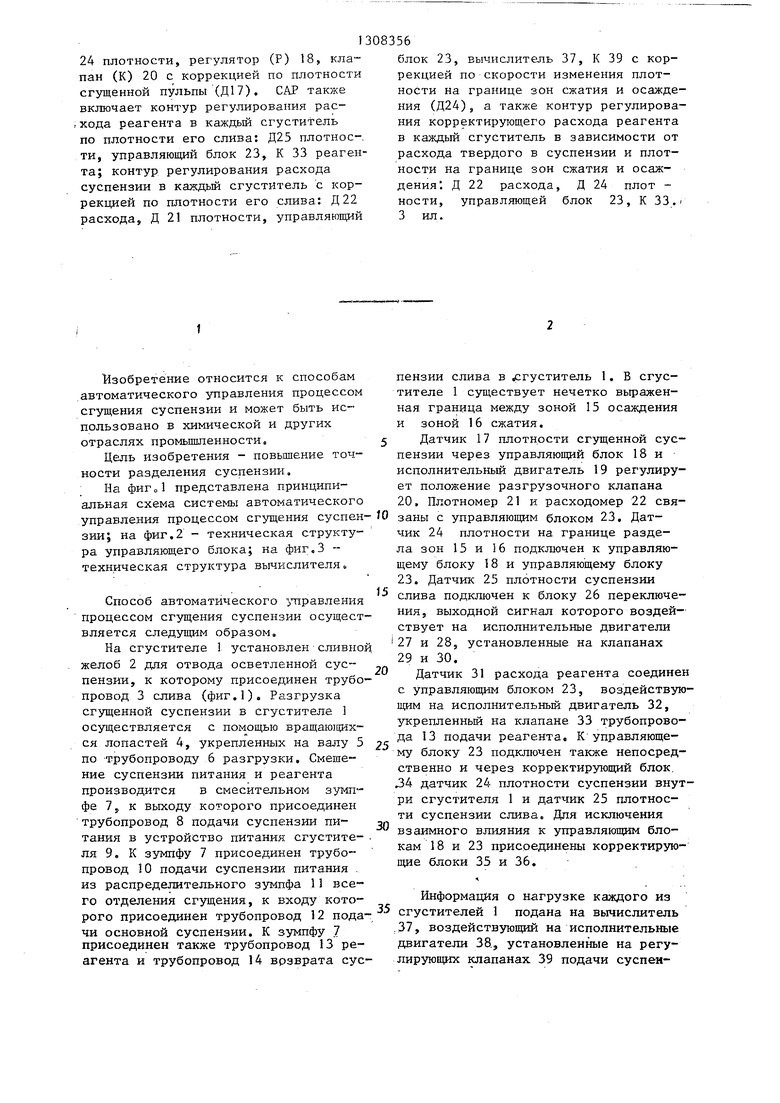
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой сгустителя | 1986 |
|
SU1421367A1 |
| Способ автоматического регулирования режима работы сгустителя | 1987 |
|
SU1606147A1 |
| Способ автоматического управления работой сгустителя | 1987 |
|
SU1423143A1 |
| Способ автоматического управления режимом работы сгустителя | 1973 |
|
SU633549A1 |
| Способ управления процессом сгущения пульпы | 1989 |
|
SU1731253A1 |
| Способ автоматического управления процессом непрерывного сгущения | 1987 |
|
SU1530208A1 |
| Способ автоматического управления работой сгустителей суспензии | 1986 |
|
SU1369750A1 |
| Сгуститель | 1988 |
|
SU1599047A1 |
| Система автоматического дозирования флокулянтов в процесс сгущения продуктов обогащения | 2024 |
|
RU2823214C1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
Изобретение относится к способу автоматического управления процессом сгущения, может быть использовано в химической промьшшености и позволяет повысить точность разделения суспензии. Способ реализуется САР, включающей контур регулирования расхода сгущенной пульпы на выходе каждого из сгустителей 1 в зависимости от плотности на границе его , зон сжатия и осаждения: датчик (Д) (Л 00 о 00 CAD сд О)
| Авторское свидетельство СССР № 431889, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматического управления режимом работы сгустителя | 1973 |
|
SU633549A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 431890, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
