Изобретение относится к балансировочной технике и может быть использовано при балансировке вращающихся деталей, ySvioB и механизмов.
Цель изобретения - повышение точности измерения за счет учета погрещности измерения, обусловленной дискретностью генератора импульсов.
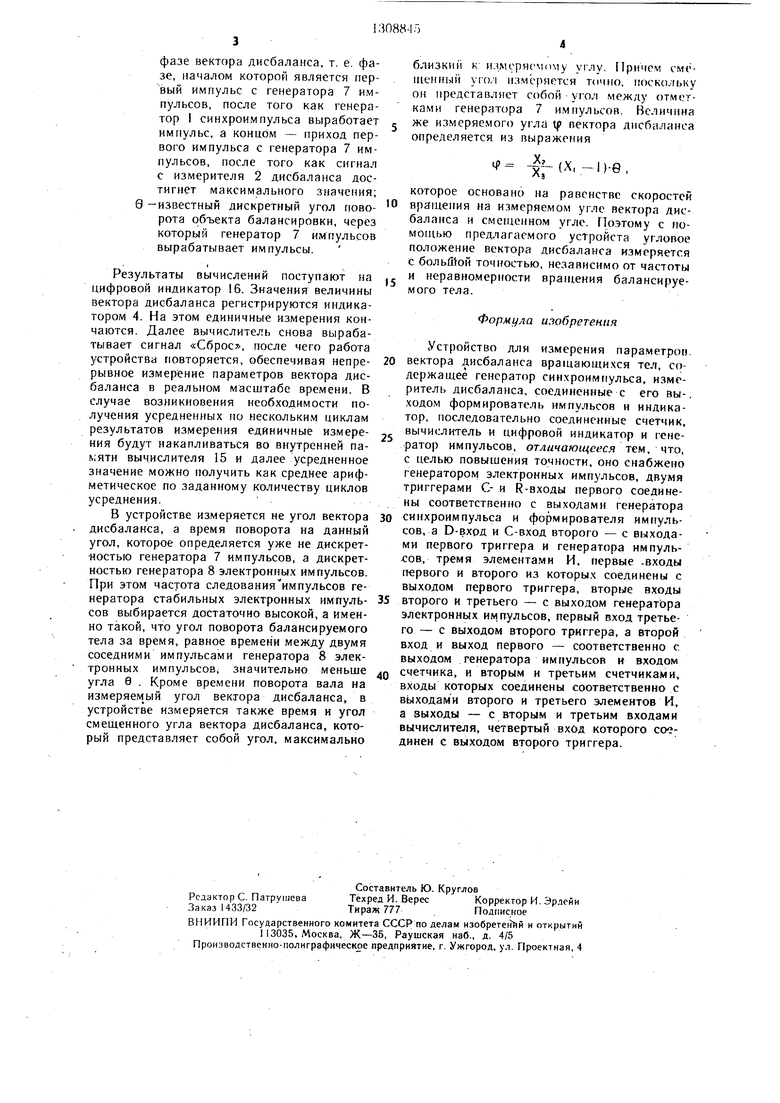
На чертеже приведена функциональная схема устройства. .,
Устройство содержит генератор 1 син- хроимпульса, измеритель 2 дисбаланса, соединенные с его выходом формировательЗ импульсов и индикатор 4, триггеры 5 и 6, С- и R-входы первого из которых соединены соответственно с выходами генератора I синхроимпульса и формирователя 3 импульсов, а D-вход второго - с выходом первого, генератор 7 импульсов, генератор 8 электронных импульсов, три элемента И 9- 11, первые входы элементов И 9 и 10 соединены с выходом первого триггера 5, вторые входы элементов И .10 и 11 - с выходом генератора 8 электронных импульсов, второй вход элемента И 9 - с соединенными между собой выходом генератора 7 импульсов и С-входом второго триггера 6, а первый вход элемента ИИ - с выходом вто рого триггера 6, три счетчика 12-14, счетные входы которых подключены соответственно к выходам элементов И 9-П, и последовательно соединенные вычислитель 15, входы которого соединены с выходами счет- чиков 12-14 и второго триггера 6, и цифровой индикатор 16.
Устройство работает следующим образом.
При включении устройства вычисли- тель 15 вырабатывает сигнал «Сброс (не показан), по которому первый и второй триггеры 5 и 6 и первый, второй и..третий счетчики 12-И приходят в исходное нулевое состояние. При вращении объекта балан- сировки генератор 1 синхроимпульса вырабатывает импульс, устанавливающий первый триггер 5, к информационному входу которого подключен единичный потенциал, в единичное состояние. Сигнал единичного уровня при этом с прямого выхода послед- него поступает на первые входы первого и второго элементов И 9, 10 и на информационный аход второго триггера 6. В результате импульсы с выхода генератора 7 импульсов начинают поступать через первый элемент И 9 на счетный вход первого счетчика 12, а импульсы с генератора 8 электронных импульсов через второй элемент И 10 на счетный вход второго счетчика 13. При дальнейшем повороте объекта балансировки генератор 7 импульсов вырабатывает пер- вый после выработки генератором 1 синхро.Импульса импульс, который поступает на синхронизирующий вход второго триггера 6.
s
5
0 О
5 0 5 5
0
Второй триггер 6 устаиав.ливается и единичное состояние и сигна.ч единичного уровня с его прямого выхода поступает на первый вход третьего элемента И 11 и на вертый вход вычислителя 15. В ре;Гу льтате импульсы с выхода генератора 8 электронных импу/)ЬСов начинают поступать через третий элемент И 11 на счетный вход третьего счетчика 14.
При дальнейшем гювороте объекта балансировки наступает момент, когда сигнал с выхода измерителя 2 дисбаланса достигает максимального значения. В этот момент формирователь 3 импульсов вырабатывает единичный импульс, который переводит первый триггер 5 в нулевое состояние. Сигнал нулевого уровня при этом с его прямого выхода поступает на первые входы первого и второго элементов И 9, 10 и на информационный вход второго триггера 6. В результате первый -и второй элементы И 9, 10 закрываются и импульсы на счетные входы первого и второго счетчиков 12 и 13 прекращают поступать. При дальнейшем повороте объекта балансировк и, генератор 7 импульсов вырабатывает первый после выработки формирователем 3 импульса импульс, который поступает на синхронизирующий вход второго триггера 6. Второй триггер 6 устанавливается в нулевое состояние и сигнал нулевого уровня с его прямого выхода поступает на первый в ход третьего.элемента И 11 и четвертый вход вычислителя 15. В результате третий элемент И И закрывается и импульсы на счетпый вход третьего счетчика 14 не поступают. Момент перехода второго триггера 6 из единичного состояния в нулевое является сигналом для вычислителя 15 об окончании формирования операндов в счетчиках 12-14. Вычислитель 15 осуществляет последовательную выборку операндов из счетчиков 12-14 во внутреннюю память и осуществляет расчет углового положения вектора дисбаланса относительно синхрометки согласно выражению
. . ц, .1(х, 1).е,
где Х| - операнд, сформировавшийся в первом счетчике 12 и представляющий собой количество импульсов гене- . ратора 7 импульсов, соответствую- щее фазе вектора дисбаланса; Хг -операнд, сформировавп1ийся во втором счетчике 13 и представляющий собой количество импульсов генератора 8 электронных импульсов, соответствующее фазе вектора дисбаланса;
Х - операнд, сформировавшийся в третьем счетчике 14 и представляющий собой количество импульсов генератора 8 электронных импульсов, соответствующее смещенной
фазе вектора дисбаланса, т. е. фазе, началом которой является первый импульс с генератора 7 импульсов, после того как генератор 1 синхроимпульса выработает импульс, а концом - приход первого импульса с генератора 7 импульсов, после того как сигнал с измерителя 2 дисбаланса достигнет максимального значения; -известный диcкpeтffый угол поворота объекта балансировки, через который генератор 7 импульсов вырабатывает импульсы.
Результаты вычислений поступают на цифровой индикатор 6. Значения величины вектора дисбаланса регистрируются индикатором 4. На этом единичные измерения кончаются. Далее вычислитель снова вырабатывает сигнал «Сброс, после чего работа устройства повторяется, обеспечивая непрерывное измерение параметров вектора дисбаланса в реальном масштабе времени. В случае возникновения необходимости получения усредненных по нескольким циклам результатов измерения единичные измерения будут накапливаться во внутренней памяти вычислителя 15 и далее усредненное значение можно получить как среднее арифметическое по заданному количеству циклов усреднения.
В устройстве измеряется не угол вектора дисбаланса, а время поворота на данный угол, которое определяется уже не дискретностью генератора 7 импульсов, а дискретностью генератора 8 электронных импульсов. При этом частота следования импульсов генератора стабильных электронных импулЬ- сов выбирается достаточно высокой, а именно такой, что угол поворота балансируемого тела за время, равное времени между двумя соседними импульсами генератора 8 электронных импульсов, значительно меньше угла 8 . Кроме времени поворота вала на измеряем ый угол вектора дисбаланса, в устройстве измеряется также время и угол смещенного угла вектора дисбаланса, который представляет собой угол, максимально
близкий к и:щсря Ч1)му углу. Причем смещенный уго.м измеряется точпо, поскольку он представляет собой у1 ол между отметками генератора 7 импульсов. Величина же измеряемого угла вектора дисбаланса определяется из выражения
X,
Ф -€ (X, Л}
1)-0,
o
0
О 5
5
0
которое основано на равенстве скоростей вращения на измеряемом угле вектора дисбаланса и смещенном угле. Поэтому с помощью предлагаемого устройств угловое положение вектора дисбаланса измеряется с больШой точностью, независимо от частоты и неравномерности вращения балансируемого тела.
Формула изобретения
Устройство для измерения параметроп. вектора дисбаланса вращающихся тел, содержащее генератор синхроимпульса, измеритель дисбаланса, соединенные с его вы-, ходом формирователь импульсов и индикатор, последовательно соединенные счетчик, вычислитель и цифровой индикатор и генератор импульсов, отличающееся тем, цто, с целью повышения точности, оно снабжено генератором электронных импульсов, двумя триггерами С- и R-входы первого соединены соответственно с выходамн генератора синхроимпульса и формирователя импульсов, а В-вход и С-вход второго - с выходами первого триггера и генератора импуль- сов, тремя элементами И, первые .входы первого и второго из которых соединены с выходом первого триггера, вторые входы второго и третьего - с выходом генератора электронных имаульсов, первый вход третьего - с выходом второго триггера, а второй вход и выход первого - соответственно с выходом генератора импульсов и входом счетчика, и вторым и третьим счетчиками, входы которых соединены соответственно с выходами второго и третьего элементов И, а выходы - с вторым и третьим входами вычислителя, четвертый вхОд которого соединен с выходом второго триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1404856A1 |
| Устройство для измерения дисбаланса | 1988 |
|
SU1522059A1 |
| Измеритель вектора дисбаланса | 1987 |
|
SU1439423A1 |
| Измеритель вектора дисбаланса | 1987 |
|
SU1490517A1 |
| Устройство для измерения угла поворота коленчатого вала двигателя внутреннего сгорания | 1985 |
|
SU1334056A1 |
| Устройство для контроля неравномерности вращения вала двигателя внутреннего сгорания | 1986 |
|
SU1348696A1 |
| Устройство для диагностики дизелей | 1986 |
|
SU1379675A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1984 |
|
SU1211440A1 |
| Устройство для измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1985 |
|
SU1280177A2 |
Изобретение относится к балансировочной технике. Цель изобретенияио- вьпнение точности за счет учета FiorpeiH- ностн, обусловленной дискретностью гене- рато)а имиульсов. (л1гналы с генератора 7 имнульсов и генератора 8 электронных импульсов по си1 иалам с триггеров 5 и 6 через элементы И 9 -1 1 и счетчики 12-- 14 поступают иа в.ходы вычислителя 15, который онределяет фазу дисбаланса за время, обусловленное перебросом триггера 6. 1 ил.
| Способ определения фазы дисбаланса роторов | 1977 |
|
SU724953A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4063461, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
