со
4 N3
СО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения дисбаланса | 1988 |
|
SU1522059A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1404856A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1308845A1 |
| Измеритель вектора дисбаланса | 1987 |
|
SU1490517A1 |
| Устройство для анализа ритма сердца | 1986 |
|
SU1553049A1 |
| Многофункциональная микропроцессорная система для диагностики двигателей внутреннего сгорания | 1987 |
|
SU1437720A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| УСТРОЙСТВО ЦИФРОВОЙ КОГЕРЕНТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1990 |
|
SU1818989A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение точности за счет увеличения дискретности измерений и цифровой обработки сигналов. Сигналы с датчика 1 синхроимпульсов и измерителя 7 дисбаланса поступают в аналого-цифровой преобразователь 10, который преобразует сигналы в цифровую форму и через регистр 11 посылает их в вычислитель 4. Элементы поступающего в вычислитель 4 массива формируются с дискретностью, определяемой генератором 6 импульсов. Вычисленные значения амплитуды и фазы дисбаланса поступают на вход индикатора 5. 3 ил о
0t/3j
Изобретение относится к баланси- ровочной технике и может быть ис- пользовано при баланйировке вращающихся деталей, узлов и механизмово
Цель изобретения - повышение точ нести за счет увеличения дискретности измерений и цифровой обработки сигналов,
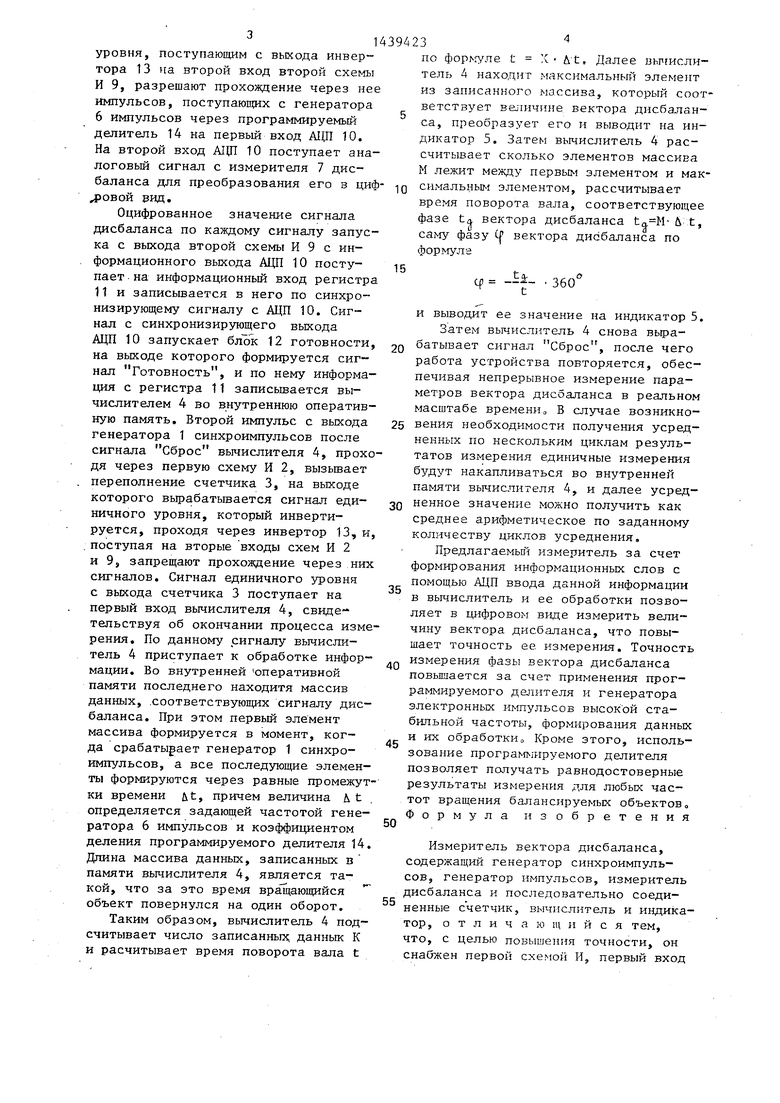
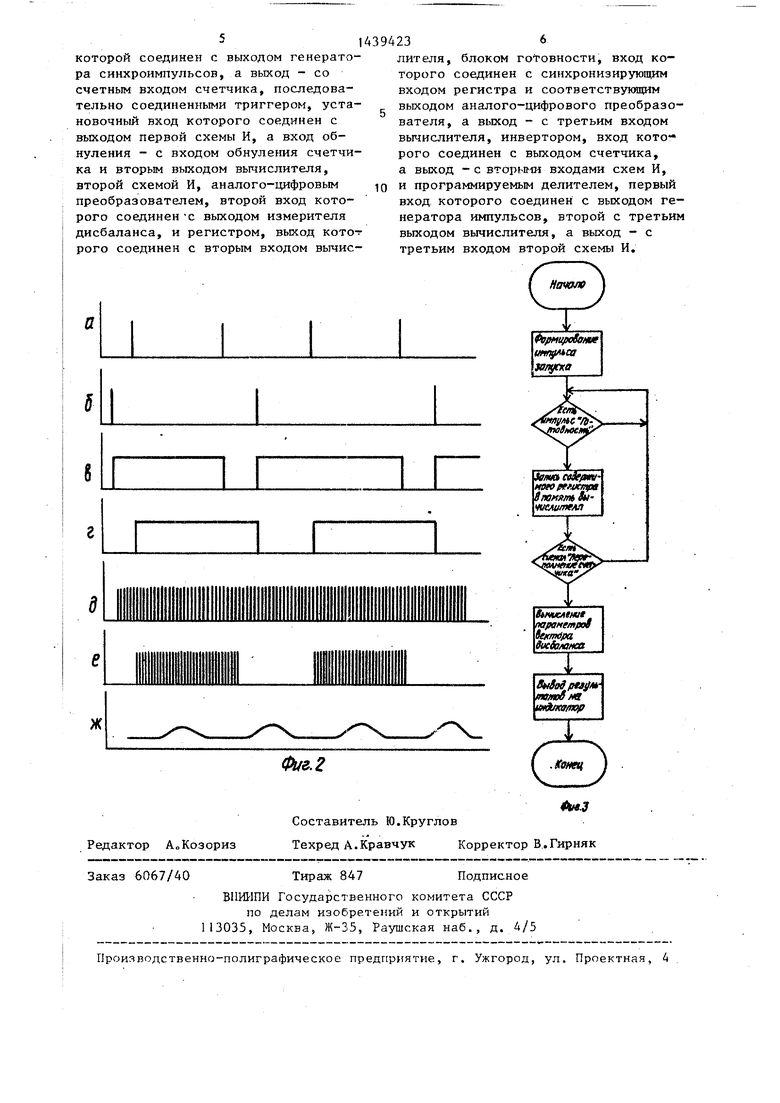
На фиго1 приведена функциональная схема измерителя; на фиг.2 - временная диаграмма синхронизации элементов измерителя: а сигналы на вико- де генератора синхроимпульсов, б - сигналы на втором вькоде вычислителя, в - сигналы на выходе инвертора, г - сигналы на выходе триггера, д - сигналы на выходе программируемого делителя, е - сигналы -на выходе второй схемы И, ж - сигналы на выходе измерителя дисбаланса; на фиГоЗ - блок-схема алгоритма вычислителяо
Измеритель содержит последовательно соединенные генератор 1 синхроимпульсов, схему И 2, соединенньй счетным входом счетчик 3, вычислитель 4 и индикатор 5, генератор 6 импульсов, измеритель 7 дисбаланса, последовательно соединенные триггер 8, установочньй вход которого нен с выходом схемы И 2, а вход обнуления - с входом обнуления счет чи- .ка 3 и вторым выходом вычислителя 4, .вторую схему И 9, аналого-цифровой преобразователь (АЦП) 10, второй вход которого соединен с выходом } змерителя 7 дисбаланса, и регистр 11, выход которого соединен с вторым входом вычислителя 4, блок 12 готовности, вход которого соединен- с синхронизирующим входом регистра 11 и соответствующим выходом АЦП 10, а выход - с третьим входом вычислителя 4, инвертор 13, вход которого соединен с выходом счетчика 3, а выход - с вторыми входами схем И 2 и 9, и программируемый делитель 14, первый вход которого соединен с выходом генератора 6 импульсов, второй с третьим выходом вычислителя 4, а выход - с третьим входом второй схемы И.
Генератор 1 синхроимпульсов может быть выполнен в виде бесконтактного индуктивного измерительного преобразователя, вырабатывающего синхроимпульс при прохождении метки, нанесенной на объект балансировки, рез рабочую зону датчика, В качестве метки может быть использована канавка на периферии металлического вала объекта балансировки. Генератор 6 импульсов может быть выполнен по типовой схеме на базе формирователя К155АГЗ. Измеритель 7 дисбаланса может быть выполнен на базе бесконтактного иццуктивного дреобразоQ вателя, обеспечивающего измерение относительных колебаний (вибраций) объекта балансировки при его вращении в опорах, усиление сигнала вибраций и фильтрацию с целью выделения
5 составляющей, соответствующей частоте вращения объекта. Вычислитель 4 может быть вьшолнен на базе микро- ЭВМ Электроника-60 либо на базе любого микропроцессорного комплекта
0 обработки данных.
Индикатор 5 представляет собой типовое устройство вывода, например, на базе светодиодной индикаторной панели или устройства печати типа
5 электропишущей машины Consul-256, Цифровые элементы - первая 2 и вторая 9 схемы И, инвертор 13, триггер 8, регистр 11, блок 12 готовности, программируемьй делитель 14 могут
Q быть вьтолнены на базе типовых цифровых интегральных схем серий 133, 155, 161 и т,д, АЦП 10 может быть вьшолнен в виде АЦП К1113 ПВ1Ао
Измеритель работает следующим образом
При включении измерителя вычислитель 4 вырабатывает сигнал Сброс (фиго 26), по которому счетчик 3 и триггер 8 приходят в исходное нулевое состояние Сигнал с выхода переполнения счетчика 3 поступает на инвертор 13, с выхода которого сигнал единичного уровня поступает на второй вход второй схемы И 9 и на второй вход первой схемы И 2 и разрешает прохождение через последнюю импульсов с вьгхода генератора 1 синхроимпульсов, который вырабатьшает единичные импульсы через один оборот объекта балансировки (фиг,2а),
0 Первый импульс с выхода генератора 1 синхроимпульсов после сигнала Сброс вычислителя 4, проходя через первую схему И 2 поступает на счетный вход счетчика 3 и вход установки
5 триггера 8 При этом сигнал единичного уровня с выхода триггера 8 поступает на первый вход второй схемы И 9 и вместе с сигналом единичного
S
5
уровня, поступающим с вькода инвертора 13 на второй вход второй схемы И 9, разрешают прохождение через нее импульсов, поступающих с генератора 6 импульсов через программируемый делитель 14 на первый вход А1Щ 10. На второй вход АЦП 10 поступает ана- логовьш сигнал с измерителя 7 дисбаланса для преобразования его в цифД ОВОЙ 5ИД.
Оцифрованное значение сигнала дисбаланса по каждому сигналу запуска с выхода второй схемы И 9 с информационного выхода АЦП 10 поступает на информационный вход регистра 11 и записьшается в него по синхронизирующему сигналу с АЦП 10. Сигнал с синхронизирзпощего выхода АЦП 10 запускает блок 12 готовности, на выходе которого формируется сигнал Готовность, и по нему информация с регистра 11 записывается вычислителем 4 во внутреннюю оперативную память. Второй импульс с выхода генератора 1 синхроимпульсов после сигнала Сброс вычислителя 4, проходя через первую схему И 2, вызьтает переполнение счетчика 3, на выходе которого вырабатывается сигнал единичного уровня, который инвертируется, проходя через инвертор 13, и, . поступая на вторые входы схем И 2 и 9, запрещают прохождение через них сигналов. Сигнал единичного уровня с выхода счетчика 3 поступает на первый вход вычислителя 4, свидетельствуя об окончании процесса измерения. По данному сигналу вычислитель 4 приступает к обработке информации. Во внутренней оперативной памяти последнего находитя массив данных, .соответствующих сигналу дисбаланса. При этом первый элемент массива формируется в момент, когда срабатывает генератор 1 синхроимпульсов, а все последующие элементы формируются через равные промежутки времени it, причем величина Л t . определяется задающей частотой генератора 6 импульсов и коэффициентом деления программируемого делителя 14. Длина массива данных, записанных в памяти вычислителя 4, является такой, что за это время вращающийся объект повернулся на один оборот.
Таким образом, вычислитель 4 подсчитывает число записанных; даннык К и расчитывает время поворота вала t
по формуле t Х- Л С, Далее вьпгисли- тель 4 находит .максимальный элемент из записанного массива, который соответствует величине вектора дисбаланса, преобразует его и выводит на индикатор 5. Затем вычислитель 4 рассчитывает сколько элементов массива М лежит между первым элементом и максимальным элементом, рассчитывает время поворота вала, соответствующее фазе ta вектора дисбаланса t, саму фазу Cj вектора дисбаланса по формула
15
ч
tl
360
0
5
0
5
0
5
0
и
5
вьшодит ее значение на индикатор 5,
Затем вычислитель 4 снова вьгра- батывает сигнал Сброс, после чего работа устройства повторяется, обеспечивая непрерывное измерение параметров вектора дисбаланса в реальном масштабе времени,, В случае возникновения необходимости получения усредненных по нескольким циклам результатов измерения единичные измерения будут накапливаться во внутренней памяти вычислителя 4, и далее усредненное значение можно получить как среднее арифметическое по заданному количеству циклов усреднения.
Предлагаемьй измеритель за счет формирования информационных слов с помощью АЦП ввода данной информации в вычислитель и ее обработки позволяет в цифровом виде измерить величину вектора дисбаланса, что повышает точность ее измерения. Точность измерения фазы вектора дисбаланса повышается за счет применения программируемого делителя и генератора электронных импульсов высокой стабильной частоты, формирования данных и их обработки Кроме этого, использование пpoгpaм iиpyeмoгo делителя позволяет получать равнодостоверные результаты измерения для любых частот вращения балансируемых объектов Формула изобретения
Измеритель вектора дисбаланса, содержащий генератор синхроимпульсов, генератор импульсов, измеритель дисбаланса и последовательно соединенные счетчик, вычислитель и индикатор, отличающийся тем, что, с целью повышения точности, он снабжен первой схемой И, первый вход
Ж
.2
Атойфт - HKOfeftxma 9понять вы- чиелитмля
| Способ определения фазы дисбаланса роторов | 1977 |
|
SU724953A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4063461, кло G 01 М 1/22, 1977. | |||
