Изобретение относится к области электроизмерений и может использоваться для следящего измерения и кодирования частоты электрических сигналов.
Цель изобретения - повышение быстродействия и-точности путем уменьшения динамической погрешности.
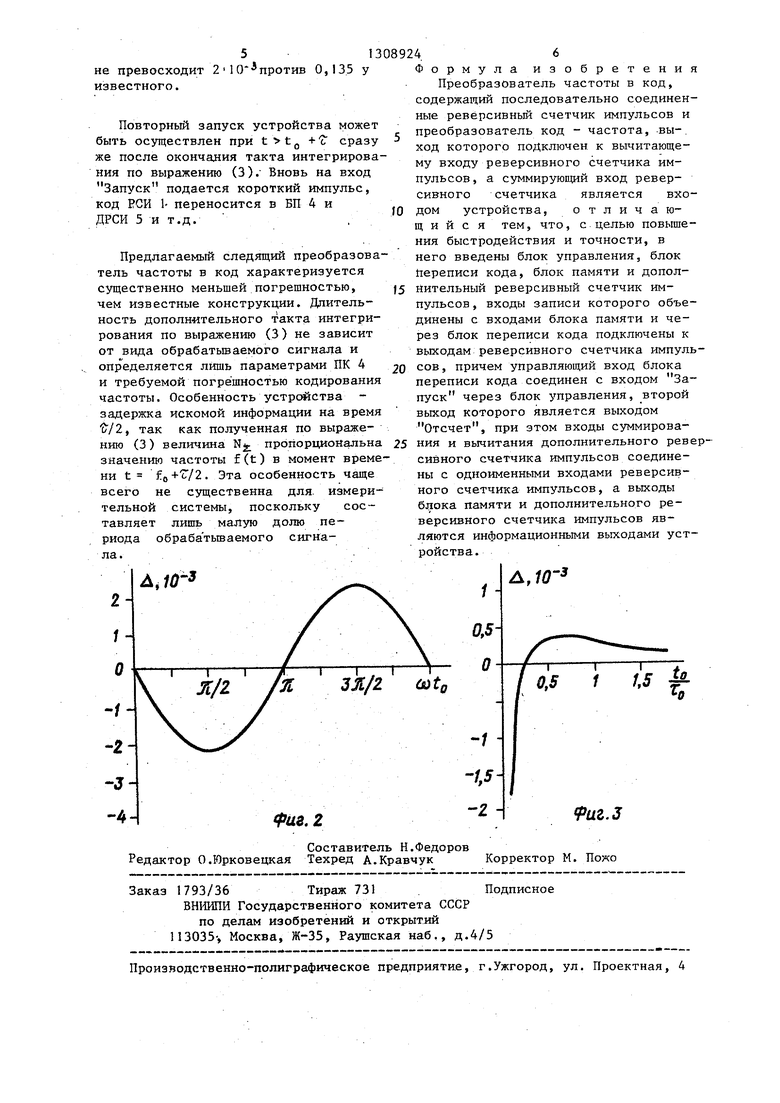
На фиг.1 представлена структурная схема преобразователя;на фиг. 2 и 3 - метрологические характеристики преобразователя при обработке соответственно синусоидального и экспо- нендиального сигналов.
Преобразователь содержит реверсивный счетчик 1 импульсов РСИ), преобразователь 2 код - частота (ПКЧ), блок 3 переписи кода (ВПК), блок 4 памяти (вп), дополнительный реверсивный счетчик 5 импульсов (ДРСИ), блок 6 управления (БУ), вход 7 Запуск, выход 8 Отсчет, информационные выходы 9.
РСИ 1 и ПКЧ 2 соединены последовательно , выход ПКЧ 2 подключен к вычитающему входу РСИ 1, а суммирующий вход РСИ 1 является входом устройства , Входы БП 4 и ДРСИ 5 объединены и через ВПК 3 подключены к выходам РСИ 1 и ПКЧ 2, а выходы БП 4 и ДРСИ 5 образуют информационные выходы 9 устройства. Суммирующий и вычитающий входы ДРСИ 5 соединены с одноименными входами РСИ 1, а управляющий вход БПК 3 через БУ 6 соединен с входом 7 Запуск, причем вторым выходом БУ 6 является вьЕСод 8 Отсчет.
Преобразователь работает следующим образом.
На вход преобразователя от источника преобразуемого сигнала поступает сигнал с измеряемой частотой f (t). Узел из РСИ 1 и. ПКЧ 2 осуществляет следящее преобразование частоты f(t) в код. Его работа описьшает- ся дифференциальным уравнением
dN(t) dt + (t) f(t),
где N(t) - выходной код РСИ I; ot - коэффициент передачи ПКЧ 2.
50
При t tg ОТ внешнего устройстДинамическая погрешность предложенного преобразователя при определенном соотношении между величинами (X, , с и у много меньше погрешности
ва, являющегося потребителем информа- известного устройства, ции, на вход 7 Запуск поступает Пусть, например, f(t) короткий импульс. Этот импульс транслируется БУ. 6 и поступает на управляющий вход БПК 3, в результате чего
.„ sinwx.
где
-Р
+
центральная
+ f...
частота, f у,, - девиация частоты и
СО - частота модуляции. В этом случае
308924 2
выходы РСИ 1 на короткое время соединяются с информационными входами БП 4 и ДРСИ 5. Младшие разряды операнда N(10) записываются в БП 4, а старшие разряды в виде начальной установки вводятся в ДРСИ 5.
Импульсные последовательности входной частоты f (t) и частоты o(, N(t), формируемой ПКЧ 2, поступают соответ- ственно на суммирующий и вычитающий входы ДРСИ 5 и при t tg подсчитываются этим счетчиком. При t БУ 6 выдает на выход 8 Отсчет который воспринимается внещним пот- ребителем информации как сигнал готовности информации. В этот момент времени код N считывается с выходов БП 4 и ДРСИ 5.
Процесс накопления кода N описывается уравнением
N
t
N(to) -ьу J f(t)(t) dt, 0(2)
25
30
где у 2 , n - количество младших двоичных разрядов операнда NCt), размещаемых в БП 4. Преобразуя -. уравнение (2) с учетом уравнения (1), получают
Njf N(tJ +у J dN(t)
г
N(t,) (t,+) - N(t,).
(3)
IQ И затем просум- c приращением co40
45
50
Выражение показьшает, что для формирования кода NJ- необходимо считать код РСИ 1 при t мировать этот код держимого РСИ 1 в течение интервала времени tg,tQ+ o , предварительно умножив это приращение на некоторую константу Y. Операция умножения приращения РСИ 1 на величину у производится путем сдвига.кода приращения на n log 2. у двоичных разрядов вправо в составе выходного операнда Nj-, который формируется на выходах БП 4 и ДРСИ 5.
Динамическая погрешность предложенного преобразователя при определенном соотношении между величинами (X, , с и у много меньше погрешности
известного устройства, Пусть, например, f(t)
.„ sinwx.
где
-Р
+
центральная
+ f...
частота, f у,, - девиация частоты и
СО - частота модуляции. В этом случ
решение уравнения 1) для установившегося режима имеет следующий вид:
N(t)
-;°--i &f m О cos о t C
Из выражения (4) находим максимальную нормированную абсолютную погрешность й,д,с известного преобразователя при обработке сигнала, частота которого изменяется во времени по синусоидальному закону.
макс f(t)|
()| N(t)-(l/oi)
MOkC
о /-joi + Q.
Если, например, C0/6i 0,2, то
UMqKC 0,196.
Пусть теперь f(t) F при
t t О и f(t) FO expC-ty-j) при t 0, тогда решение дифференциального уравнения (1 ) при oL tg ф 1 имеет вид
N(t)
ог-СлС -)
(оСТое
-t/1
о e-oit
(5)
Из выражения з) определяют абсолютную погрешность преобразования сигнала, частота которого изменяется во времени по экспоненциальному закону
b( N(t ) - lira N(tp) /FO
- (6)
где t(j 0.
Расчеты no уравнению (jo) пока- зывают, что функция uCt) при осТ, 5 достигает максимального значения Д(, .135 при Ц,,42г .
Таким образом, динамическая пог-. решность кодирования изменяющейся частоты известным устройством весьма велика.
Пусть преобразованию подвергается сигнал с частотой f(t) fp + + f sincot предложенным ус гройст- вом. Выходной код N(t) РСИ при (a3/oi)icl и ott «i 1 находят выражения (4 .
- sin cot
(7)
5
в соответствии с уравнением (3) составляют линейную комбинацию кодов (N(tg) и N(t +-с) при у (2 + Di)/2ti L и получают
Е-у-- -«-4 --f
+ sina}( ---) (8)
Абсолютные погрешности известного устройства и предложенного описываются последними слагаемыми правых частей формул (7) и (з). Сопоставляя эти формулы, находят, что максимальное значение модуля абсолютной погрешности известного устройства превосходит аналогичную характеристику предложенного устройства в ot /СО раз. На фиг.2 представлен график нормированной абсолютной погрешности
(
f(to .)- 2 J
30
35
Q
45
5
рассчитанный с привлечением выражения (3) и точного решения (4) дифференциального уравнения (1) при о т и СО/об 0,2. Длительность о интервала интегрирования в выражении (З для заданной величины оС вычислена по приведенной формуле, связывающей значения у и ot c . График (фиг.2) показывает, что в оговоренных условиях абсолютная динамическая погрешность предла- гаемой модификации следящего преобразователя частоты в код . уменьшается до 2,2-10 против 0,196 у известного.
При кодировании определенной экспоненциально изменяющейся частоты выделяют Nj по выражению (3) ,используя формулу (5) для N(t). Получают следующее выражение для нормированной абсолютной погрешности
Д (ct/F,){N(to) (+-0) - - N(t) - ехр -(t -bt/2)/tol . (9)
График функции и по выражению (9) в зависимости от величины отношения tj/ to при об TO 5 и у 2 (фиг.З), свидетельствует, что погрешность предложения при to/Co 5s 0,1
не превосходит известного.
2 Ю - против 0,135 у
Повторный запуск устройства может быть осуществлен при t t + сразу же после окончалия такта интегрирования по выражению (3).- Вновь на вход Запуск подается короткий импульс, код РСИ 1- переносится в БП 4 и ДРСИ 5 и т.д.
Предлагаемый следящий преобразователь частоты в код характеризуется существенно меньшей погрешностью, чем известные конструкции. Длительность дополнительного такта интегрирования по выражению (3) не зависит от вида обрабатьшаемого сигнала и определяется лИшь параметрами ПК 4 и требуемой погрешностью кодирования частоты. Особенность устройства - задержка искомой информации на время , так как полученная по выраже- величина Nj. пропорциональна
кию (3) величина N
значению частоты f(t) в момент времени t fg+T/2. Эта особенность чаще всего не существенна для. измери- тельной системы, поскольку составляет лишь малую долю периода обраба тьгоаемого сигнала..
08924.6
Формула изобретения
Преобразователь частоты в код, содержащий последовательно соединенные ревёрсивньй счетчик импульсов и
J преобразователь код - частота, вы-, ход которого подключен к вычитающему входу реверсивного счетчика импульсов , а суммирующий вход реверсивного счетчика является вхоW дом устройства, отличающийся тем, что, с целью повышения быстродействия и точности, в него введены блок управления, блок переписи кода, блок памяти и допол15 нительный реверсивный счетчик импульсов, входы записи которого объединены с входами блока памяти и через блок переписи кода подключены к выходам реверсивного счетчика импуль20 сов, причем управляющий вход блока переписи кода соединен с входом Запуск через блок управления, второй выход которого является выходом Отсчет, при этом входы суммирова25 ния и вычитания дополнительного реверсивного счетчика импульсов соединены с одноименньми входами реверсивного счетчика импульсов, а выходы блока памяти и дополнительного реверсивного счетчика импульсов являются информационными выходами устройства.
Фиг. 2
fuz.J
„Составитель Н.Федоров
Редактор О.Юрковецкая Техред А.Кравчук Корректор М. Пожо
Заказ 1793/36 Тираж 731 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035-, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ следящего преобразования частоты импульсной последовательности в код | 1986 |
|
SU1347187A1 |
| Преобразователь частоты в код | 1985 |
|
SU1308923A1 |
| ЦИФРОВОЙ ВИБРОМЕТР | 1973 |
|
SU398835A1 |
| Многофункциональный аналогоцифровой преобразователь | 1979 |
|
SU864137A1 |
| Преобразователь коэффициента мощности в код | 1978 |
|
SU744964A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| ЦИФРОВОЙ ТЕРМОМЕТР | 2012 |
|
RU2510492C2 |
| Следящий аналого-цифровой преобразователь | 1988 |
|
SU1562972A1 |
| ЦИФРОВОЙ ФАЗОМЕТР | 1973 |
|
SU385236A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
Изобретение касается электроизмерений и может быть использовано для следящего измерения и кодирования частоты электрических сигналов. Целью изобретения является повышение быстродействия и точности путем уменьп1ения динамической погрешности. Для достижения поставленной цели в устройство дополнительно введены блок 6 управления, блок 3 переписи кода, блок 4 памяти и реверсивный счетчик 5 импульсов. Кроме того, устройство содержит рёверсивньш счетчик 1 импульсов, преобразователь 2 код - частота, вход 7 Запуск, вход 8 Отсчет, информационные выходы 9 устройства. Предложенная при этом модификация следящего преобразователя частоты в код характеризуется существенно меньшей погрешностью, чем известные конструкции пoдoбньfx преобразователей. 3 ил. § (Л
| Цифровой экстраполирующий частотомер | 1974 |
|
SU568903A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Адаптивный преобразователь частоты в код | 1978 |
|
SU780192A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Martin.I.D.Digital methods of frequency measurement a comparison.- The Padio and Electronic Engineer, 1972, V.42, № 6, p.285-294, fig.3 | |||
