1
Изобретение относится к спортивным тренажерам и может быть использовано для тренировки спортсменов при обработке бросков мяча в миплень.
Цель изобретения - повышение эффективности тренировки путем фиксирования взаимного расположения элементов броско- вой руки нри выполнении броска мяча.
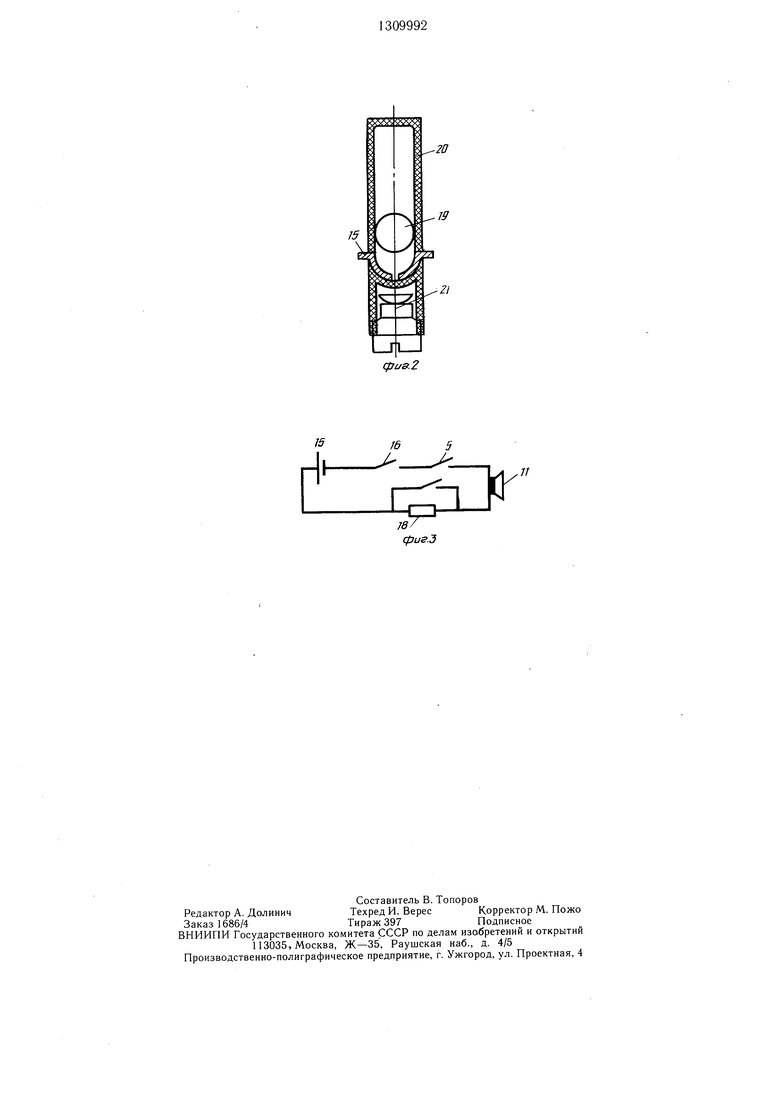
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - датчик положения бросковой руки;- на фиг. 3 - электрическая схема устройства.
Индикатор угловых перемещений биозвеньев спортсмена содержит узел 1 угловых перемещений со средствами 2 крепления с сочленяющимися биозвеньями, сигнализатор 3 заданного угла, узел 1 угловых перемещений вЕзЩОлнен в виде встроенных в корпус 4 контактов заданного 5 и предельного 6 расположения элементов руки) и элемент 7 взаимодействия с контактами, закрепленный между компенсирующими 8 и возвратным 9 упругими элементами, регулятор 10 момента срабатывания, зуммер 11, а компенсирующий элемент 8 соединен гибкой связью 12 через направляющие опоры 13, установленные на кисти и фалангах указательного пальца, с конечной опорой 14 для закрепления на третьей (ногтевой) фаланге указанного пальца. Зуммер 1 1 соединен с источником 15 питания через последовательные контакты 16 датчика 17 положения бросковой руки, контакты заданного расположения элементов руки 5 и ограничивающего сопротивления 18, зашунтиро- ванного контактами предельного расположения элементов руки 6. Датчик 17 положения бросковой руки выполнен в виде свободно перемещающегося ферромагнитного груза 19 в замкнутом неферромагнитном корпусе 20, в одном из концов которого расположен разомкнутый неподвижный такт 16, под которым помещается постоянный магнит 21.
Устройство работает следующи.м образом.
Перед началом тренировки с помощью регулировочного винта 10 настраивают устройство на срабатывание зуммера при заданном положении элем ентов руки. Для тренировки с мищенью, находящейся выше руки, датчик 17 положения бросковой руки устанавливают неподвижными контактами 16 вниз, для мищени, находящейся ниже руки,- неподвижными контактами 16 вверх.
В момент выполнения броска кисть и указательный палец перемещаются относительно предплечья. Гибкая связь 12, пере
2
мещаясь за конечной опорой 14, по направляющим кольцам опоры 13 сначала растянет компенсируюп1ий упругий элемент 8, обладающий меньщей жесткостью, а затем начнет растягивать возвратный упругий эле- мент 9 с большой жесткостью и вместе с ним начнет перемещаться элемент 7 взаимодействия, который вызовет за.мыкание контакта заданного положения элементов руки 5 и срабатывание зуммера 11. При дальней10 щем перемещении элементов руки произойдет срабатывание контактов предельного положения элементов руки 6 и увеличится громкость сигнала зуммера 11. При повороте датчика 17 положения бросовой руки относительно первоначального положения
15 происходит размыкание контактов 16 и отключение питания от зуммера И.
Формула изобретения
1.Индикатор угловых перемещений биозвеньев спортсмена, содержащий узел угло20 вых перемещений биозвеньев со средствами крепления с сочленяющимися биозвеньями, сигнализатор заданного угла, отличающийся тем, что, с целью повышения эффективности тренировки, в него введен дат25 чик положения бросковой руки, а узел угловых переме1цений выполнен в виде встроенных в корпус контактов заданного и преде.чьного расположения элементов руки, элемент взаимодействия с контактами, закрепленный между компенсирующим и воз30 вратным упругими элементами, регулятор, зуммер, источник питания, причем возвратный упругий элемент прикреплен к регулятору момента срабатывания зуммера, а комненсирующий эле.мент соединен гибкой связью через направляющие опоры для
35 закрепления на кисти и фалангах указательного пальца с конечной опорой для закрепления на третьей (ногтевой) фаланге указательного пальца, а зум.мер соединен с источником питания через последовательно соединенные контакты датчика положения
40 бросковой руки, контакты заданного расположения эле.меитов руки и зашунтирован- ное контактами предельного расположения элементов руки.
2.Индикатор по п. 1, отличающийся 45 тем, что датчик положения бросковой руки
выполнен в виде свободно перемещ,ающе- гося ферромагнитного груза в замкнутом неферромагнитном корпусе, в одном из концов которого расположен разомкнутый неподвижный контакт, под которым разме- 50 щен постоянный магни.
20
21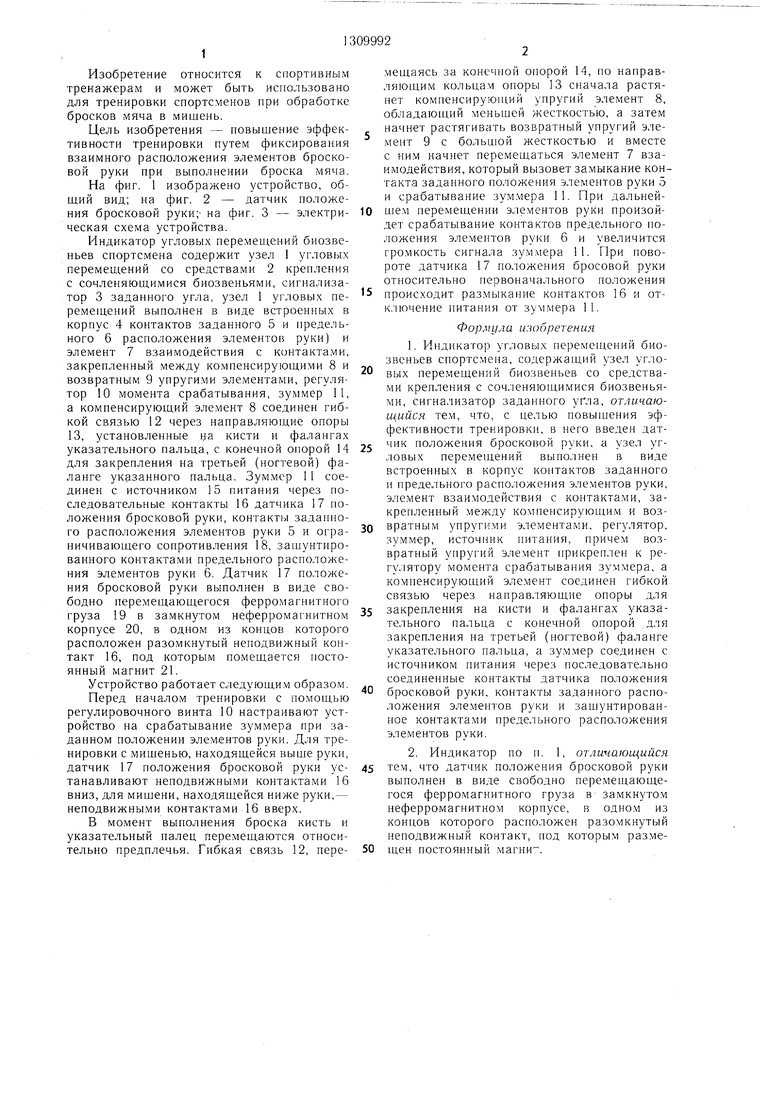
| название | год | авторы | номер документа |
|---|---|---|---|
| Индикатор угловых перемещений биозвеньев спортсмена | 1988 |
|
SU1602559A1 |
| Устройство для тренировки броска мяча баскетболистов | 1987 |
|
SU1484355A1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ БАСКЕТБОЛЬНОГО БРОСКА | 2000 |
|
RU2153378C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭВМ И УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2003 |
|
RU2251725C2 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1993 |
|
RU2089817C1 |
| СПОСОБ ОБУЧЕНИЯ СКОРОСТНОЙ СТРЕЛЬБЕ ИЗ ПИСТОЛЕТА (ВАРИАНТЫ) | 2008 |
|
RU2376545C1 |
| Способ обучения скоростной стрельбе из пистолета | 2022 |
|
RU2788551C1 |
| Тренировочная перчатка для метания гранаты | 2021 |
|
RU2762379C1 |
| СПОСОБ УДЕРЖАНИЯ АВТОМАТА ПРИ ВЕДЕНИИ СКОРОСТНОЙ СТРЕЛЬБЫ ОДИНОЧНЫМИ ВЫСТРЕЛАМИ И АВТОМАТИЧЕСКИМ ОГНЕМ | 2008 |
|
RU2375663C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ БРОСКОВ БАСКЕТБОЛЬНОГО МЯЧА | 2016 |
|
RU2693812C1 |
Изобретение относится к спортивным тренажерам и позволяет при тренировках спортсменов фиксировать правильное положение элементов руки нри выполнении броска. Индикатор содержит узел угловых пе- ремеш.ений 1, который состоит из контактов 5 заданного и предельного 6 положения элементов руки, элемента взаимодействия 7, гибкой связи 12, датчика 17 положения бросковой руки. При установлении заданного положения элементов бросковой руки гибкая связь 12 совмещает элемент взаимодействия 7 с контактом 5 и включается зуммер 11. При предельном положении элементов руки срабатывает контакт 6 и громкость сигнала зуммера 11 увеличивается. Датчик 17 положения броско- о вой руки отключает питание зуммера 11 при изменении положения руки. 1 з. п. ф-лы, 3 ил. сл /4 со о со со со N3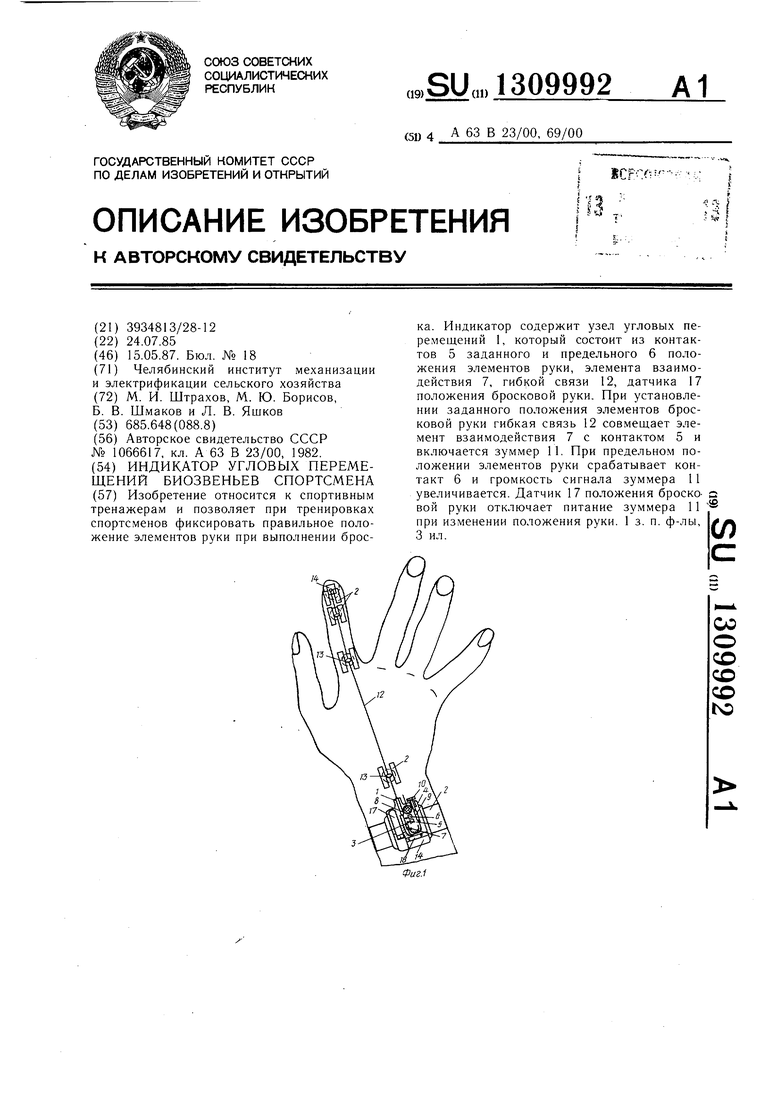
| Угловой ограничитель перемещений биозвеньев спортсмена | 1982 |
|
SU1066617A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
