Изобретение относится к спортивным тренажерам, в частности к устройствам для фиксирования правильного положения элементов руки при выполнении броска.
Целью изобретения является расширение функциональных возможностей индикатора посредством фиксации (контроля) взаимного расположения относительно друг друга биозвеньев указательного, среднего пальцев и кисти бросковой руки,, а также измерение угла поворота влево или вправо во время броска.
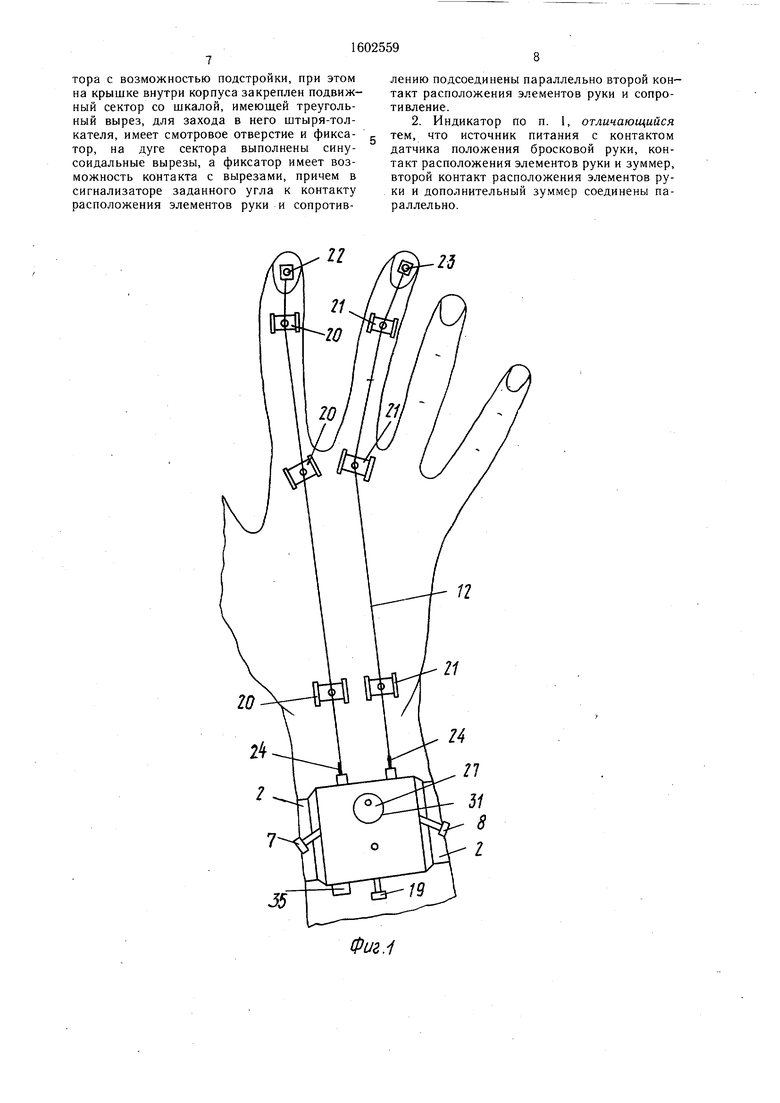
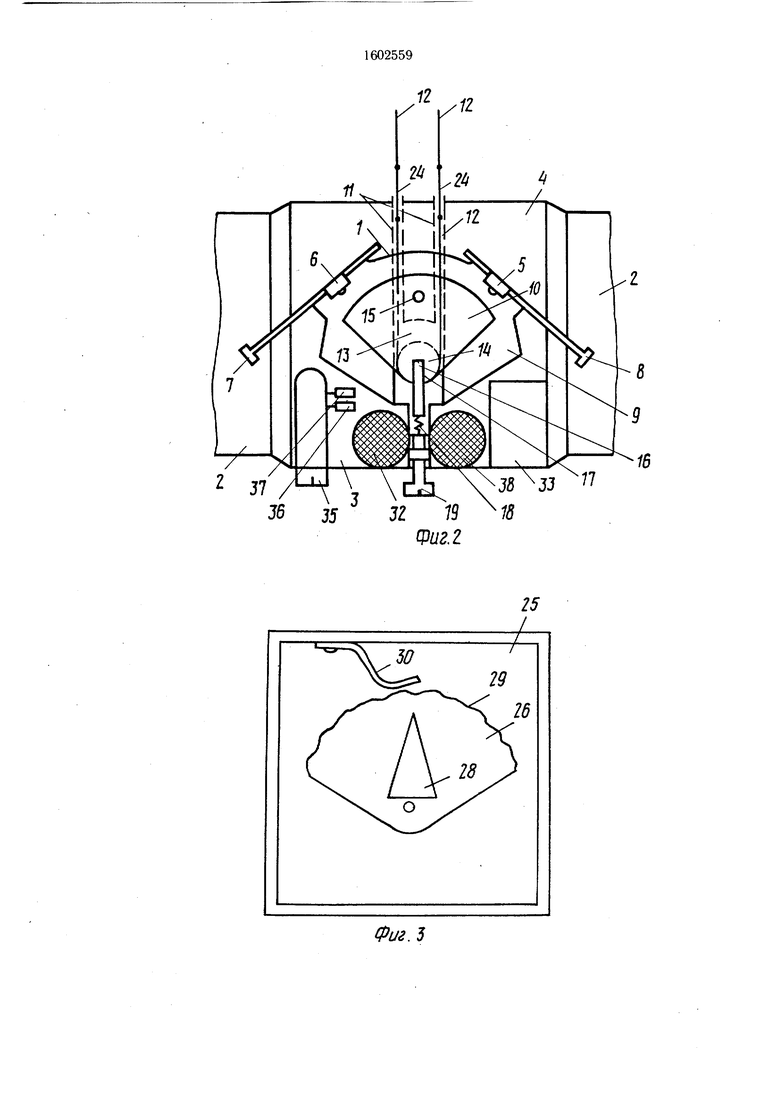
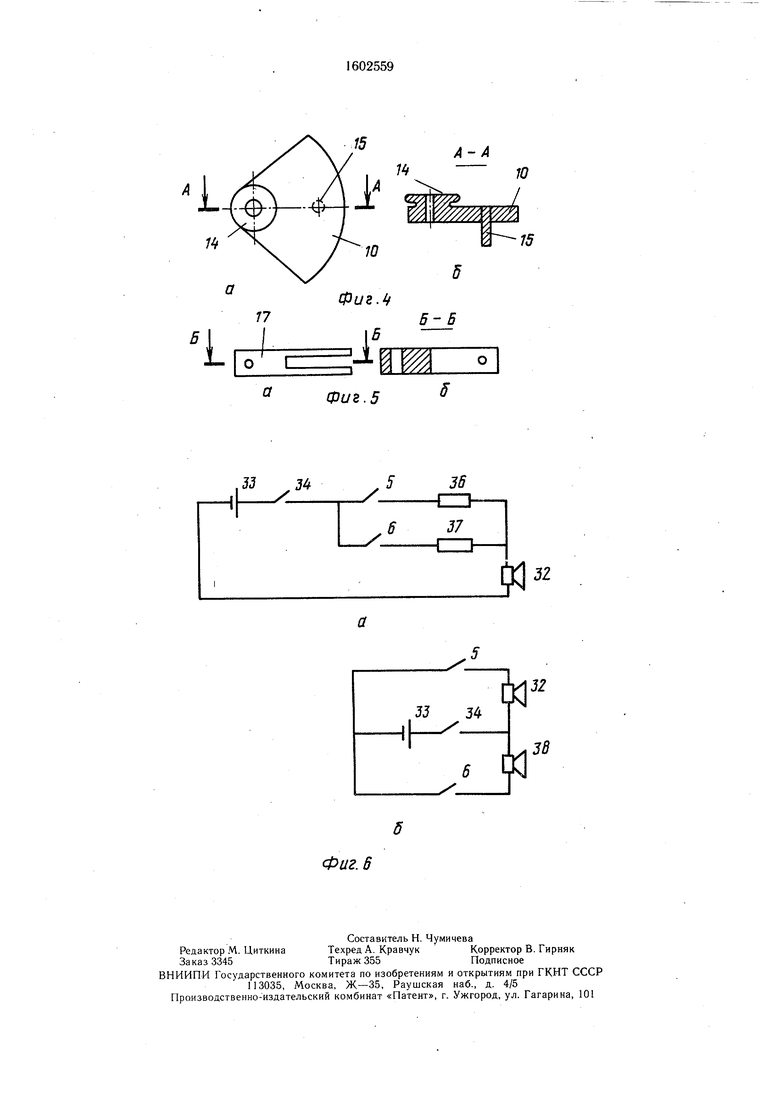
На фиг. 1 показан индикатор угловых перемещений биозвеньев спортсмена, общий вид; на фиг. 2 - индикатор со снятой крышкой; на фиг. 3 - крышка индикатора; на фиг. 4 - элемент взаимодействия, состоящий из сегмента с роликом и штырем- толкателем; на фиг. 5 - направляющая вилка; на фиг. 6а, б, - электрические схемы индикатора.
Индикатор угловых перемеш.ений биозвеньев спортсмена содержит узел 1 угловых перемещений со средствами 2 крепления с сочленяющимися биозвеньями, .сигнализатор 3 заданного угла. Узел 1 угловых перемещений выполнен в виде встроенных в корпус 4 контактов 5, 6 расположения элементов руки, закрепленных на механических тягах 7 и 8 с возможностью подстройки, (например, болтовые соединения). Контакты 5 и 6 находятся в вырезе 9 под элемент взаимодействия в виде сектора 10, к которому примыкают каналы 11 под гибкую связь 12 и вырез 13 в корпусе 4 под ролик 14. Ролик 14 жестко подсоединен к элементу 10 взаимодействия в виде сегмента, с противоположной стороны которого вставлен направляющий штырь-толкатель 15, через ось 16 ролика 14 элемент взаимодействия соединен с направляющей вилкой 17, упругим элементом 18 и регулятором момента срабатывания в виде болта 19.
tmait.
о
Ю СП
сд
Концы гибкой связи через промежуточные опоры 20 и 21 подсоединены к конечным (ногтевым) опорам 22 и 23, а ее середина перепущена через каналы 11, петлеобразно накинута на ролик и прикреплена серединой к нему. Кроме того, в гибкую связь введены симметрично компенсирующие элементы 24.
К крыщке 25 индикатора угловых перемещений прикреплен осью подвижный сектор 26 со щкалой 27, в котором сделан треугольный вырез 28 под щтырь-толкатель 15, а с торца подвижного сектора 26 на его образующей дуге сделаны синусоидальные вырезы 29 под пружинный фиксатор 30. В крыщке 25 сделано смотровое отверстие 31. Зуммер 32 соединен с источником 33 питания через последовательно соединенные контакты 34 датчика 35 положения бросковой руки, контакт 5 расположения элементов руки с сопротивлением 36. Параллельно контакту 5 расположения элементов руки с сопротивлением 36 подсоединен контакт 6 расположения элементов руки с сопротивлением 37.
Кроме того, может быть использована вторая электрическая схема (фиг. 66) в данном индикаторе, в котором источник 33 питания с контактом 34 датчика 35 положения бросковой руки, контакт 5 расположения элементов руки и зуммер 32, контакт 6 расположения элементов руки и дополнительный зуммер 38 соединены параллельно Настройка индикатора. Индикатор угловых перемещений закрепляют при помощи средств 2 крепления, например, ремещок на запястье, выводами гибкой связи в сторону кисти. Концы гибкой связи 12 прикрепляют через промежуточные опоры 20, 21 к конечным опорам 22 и 23, которые закреплены на ногтевых фалангах среднего и указательного пальцев. Кисть устанавливают в конечное правильное положение после броска с V-об- разно раздвинутыми указательным и средним пальцами, при этом должен сработать зуммер 32 звуковым сигналом «Правильный бросок. Если зуммер 32 не сработал, то начинают производить настройку регулято10
15
20
а в смотровом отверстии 31 должны быть цифровые показатели угла отклонения от правильного броска.
Работа устройства.
После настройки индикатора тренирующийся берет мяч и становится перед кольцом, заносит над головой кисть с мячом, причем указательный и средний пальцы разведены V-.образно так, чтобы проекция тра ектории мяча была бы осью симметрией для пальцев, и производит бросок мяча по кольцу. Во время броска пальцы сопровождают мяч до момента отрыва и постоянно прямые.
В индикаторе в момент заноса кисти с мячом над головой замыкается контакт 34 датчика 35 положения бросковой руки.
При сгибании кисти в момент броска ее перемещения передаются через гибкую связь 12 на ролик 14 и элемент 10 взаимодействия в виде сектора перемещается в сторону размещения контактов 5 и 6 расположения элементов руки и замыкает их. При этом срабатывает зуммер 32 сигналом «Правильный бросок.
При движении элемента 10 взаимодействия щтырь-толкатель 15 входит в угол треугольного выреза 28 в подвижном секторе 26 и устанавливает его в положение ноль градусов, которое видно через смотровое отверстие 31. При неправильном брос- 30 ке, повороте кисти или уводе одного пальца в сторону данные перемещения передаются на гибкую связь 12, где они суммируются на ролике 14. Несимметричная возник- щая сила через рычаг, равный радиусу ролика 14, поворачивает на угол поворота 35 кисти или увода одного пальца элемент 10 взаимодействия в виде сектора вокруг оси ролика 14. Один из контактов 5 или 6 расположения элементов руки уже не находится в зоне действия элемента 10 взаимодействия и поэтому не замкнут, следовательно, при этом срабатывает зуммер 32 сигналом «Неправильный бросок.
При неправильном броске при поступательно-вращательном движении элемента 10 взаимодействия щтырь-толкатель 15 входит в
25
40
ром 19 момента срабатывания (поворачи- 5 угол треугольного выреза 28 В подвижном
вают головку регулятора). Так же регулируют механическими тягами 7 и 8 положение контактрв 5 и 6 расположения элементов руки, а подвижный сектор 26 со шкалой 27 должен находиться в положении, соответствующем отклонению 0° на щкале 27, 50 которое визуально наблюдают в смотровое отверстие 31.
После настройки индикатора на правильный бросок начинают двигать указательным и средним пальцами отдельно, поворачивать влево или вправо кисть и проверяют четкость срабатывания индикатора. Индикатор должен сигнализировать об изменении положения кисти и пальцев звуковым сигналом.
55
секторе 26 со щкалой и поворачивает сектор 26 со шкалой на угол, соответствующий углу поворота кисти или углу увода одного пальца в ту сторону, в которой было рассогласование.
В смотровом отверстии 31 видно на щкале 27 величину угла рассогласования.
При разгибании кисти элемент 10 взаимодействия под действием упругого элемента 18 занимает исходное положение. При этом щтырь-толкатель 15 выходит из угла треугольного выреза 28 в подвижном секторе 26 со щкалой 27. Сектор фиксируется пружинным фиксатором 30 в положении, соответствующем данному броску.
а в смотровом отверстии 31 должны быть цифровые показатели угла отклонения от правильного броска.
Работа устройства.
После настройки индикатора тренирующийся берет мяч и становится перед кольцом, заносит над головой кисть с мячом, причем указательный и средний пальцы разведены V-.образно так, чтобы проекция тра ектории мяча была бы осью симметрией для пальцев, и производит бросок мяча по кольцу. Во время броска пальцы сопровождают мяч до момента отрыва и постоянно прямые.
5
0
В индикаторе в момент заноса кисти с мячом над головой замыкается контакт 34 датчика 35 положения бросковой руки.
При сгибании кисти в момент броска ее перемещения передаются через гибкую связь 12 на ролик 14 и элемент 10 взаимодействия в виде сектора перемещается в сторону размещения контактов 5 и 6 расположения элементов руки и замыкает их. При этом срабатывает зуммер 32 сигналом «Правильный бросок.
При движении элемента 10 взаимодействия щтырь-толкатель 15 входит в угол треугольного выреза 28 в подвижном секторе 26 и устанавливает его в положение ноль градусов, которое видно через смотровое отверстие 31. При неправильном брос- 30 ке, повороте кисти или уводе одного пальца в сторону данные перемещения передаются на гибкую связь 12, где они суммируются на ролике 14. Несимметричная возник- щая сила через рычаг, равный радиусу ролика 14, поворачивает на угол поворота 35 кисти или увода одного пальца элемент 10 взаимодействия в виде сектора вокруг оси ролика 14. Один из контактов 5 или 6 расположения элементов руки уже не находится в зоне действия элемента 10 взаимодействия и поэтому не замкнут, следовательно, при этом срабатывает зуммер 32 сигналом «Неправильный бросок.
При неправильном броске при поступательно-вращательном движении элемента 10 взаимодействия щтырь-толкатель 15 входит в
5
40
5 угол треугольного выреза 28 В подвижном
угол треугольного выреза 28 В подвижном
секторе 26 со щкалой и поворачивает сектор 26 со шкалой на угол, соответствующий углу поворота кисти или углу увода одного пальца в ту сторону, в которой бы ло рассогласование.
В смотровом отверстии 31 видно на щкале 27 величину угла рассогласования.
При разгибании кисти элемент 10 взаимодействия под действием упругого элемента 18 занимает исходное положение. При этом щтырь-толкатель 15 выходит из угла треугольного выреза 28 в подвижном секторе 26 со щкалой 27. Сектор фиксируется пружинным фиксатором 30 в положении, соответствующем данному броску.
Для отработки броска мяча (традиционный бросок) тренажер настраивается на, конечное правильное положение кисти. При броске с сопровождением мяча одним пальцем проекция полета мяча происходит через указательный палец, а средний палец уведен в сторону ладони по ходу сгибания кисти.
Работа электрической схемы.
На фиг. 6а показана электрическая схема, содержащая источник питания 33, включенный последовательно с контактом 34 датчика 35 положения бросковой руки с контактом 5 расположения элементов руки с сопротивлением 36 и зуммером 32, причем к контакту 5 расположения элементов руки с сопротивлением 38 подсоединен второй контакт 6 расположения элементов руки с сопротивлением 37.
В данной схеме сопротивление меняется в зависимости от комбинации замыкания контактов 5 и 6 расположения ментов руки.
При замыкании контакта 5 и б сопротивление будет
/J ,RM+R37 Г. Rss-Rn
при этом уровень сигнала соответствует правильному броску. При замыкании контакта 5 сопротивление будет Ro6t4 R3o, при этом уровень сигнала соответствует повороту вправо. При замыкании контакта 6 , при этом уровень сигнала соответствует повороту влево.
В данной схеме должен соблюдаться принцип , чтобы не было одинаковых сигналов.
На фиг. 66 показана электрическая схема, содержащая исто .;ник питания 33 с контактом 34 датчика 35 положения бросковой руки, контакт 5 расположения элементов руки и зуммер 32, второй контакт 6 расположения элементов руки и дополнительный зуммер 38, соединенные параллельно.
Гибкая связь выполняется из капронового щнурка, середина ее может быть закреплена на ролике. Подвижный сектор выполняется из пластмассы, на него наносится
с щкала поворота угла в диапазоне -90...0... Напротив шкалы в крыщке выпол11ено смотровое отверстие диаметром 10 мм. Направляющая вилка может быть длиной 30 мм, а регулятор момента срабатывания выполняется из пластмассы в виде болта на кон10 це с отверстием, где крепится упругий элемент. В качестве зуммера используют зуммеры от минибудильника «Луч.
15
Формула изобретения
1. Индикатор угловых перемещений биозвеньев спортсмена, содержащий узел угловых перемещений со средствами -крепления с сочленяющимися биозвеньями, сигиализа- эле- 20 тор заданного угла, датчик положения бросковой руки, узел угловых перемеще ний в виде встроенных в корпус .с крыщкой двух контактов расположения элементов руки и элемента взаимодействия с ними, соединен25 ных через компенсирующий элемент с гибкой связью, гибкая связь через направляющие опоры для закрепления на кисти и фалангах указательного пальца прикреплена к конечной опоре для закрепления на третьей (ногтевой) фаланге указательного
30 пальца, элемент взаимодействия прикреплен к регулятору момента срабатывания зуммера через возвратный упругий элемент, а сигнализатор заданного угла перемещения биозвеньев содержит з ммер, последовательно соединенный с источником питания, с
35 контактом датчика положения бросковой руки, с контактом расположения элементов руки и сопротивлением, отличающийся тем, что, с целью расщиремия функциональных возможностей индикатора посредством фиксации взаимного расположения относительно
1 зуммер оо, соединенные парал.чельни.,пп
В данной схеме зуммеры 32, 38 могут друг друга биозвеньев указате.тьного, среднеиметь различные частоты звуковых колебаний, что позволяет при комбинации замыкания контактов 5 и 6 включать отдельно зуммер 32 или дополнительный зуммер 38 или сразу два зуммера 32 и 38. При этом мы получаем три разных сигнала, которые соответствуют правильному броску, повороту вправо, влево.
Пример. Корпус индикатора угловых перемещений может .выполняться из пластмассы или пенопласта. В качестве контактов расположения элементов руки могут быть использованы микровыключатели МП 1-1, прикрепленные по принципу болт-гайка к болту из пластмассы на МЗ длиной 50 мм. В качестве компенсирующих и упругого элеменго пальцев и кисти бросковой руки, а также измерения угла поворота влево или вправо кисти во время броска, элемент взаимодействия выполнен в виде сектора и имеет жестко соединенный с ним ролик с кана- ла.ми под гибкую связь и контакты с тягами, гибкая связь узла угловых перемещений выполнена в виде симметричной гибкой тяги, другой конец которой прикреплен к третьей (ногтевой) фаланге среднего пальца, 50 для него имеется дополнительная конечная опора и дополнительный компенсирующий элемент, гибкая связь охватывает ролик, а ролик расположен на линии симметрии сектора, сектор имеет щтырь-толкатель, расположенный со стороны, противоположной ро4CU-. 1 DC rvVJ 1V1 lit П г1 LJ у ИЛ,е1 л. п yiJL/yivyi«k ,i/iv.,,iii.v..........-,.. , . , .,
та может быть использована резинка. В 55 лику, и направляющую вилку, связанную
качестве элемента взаимодействия может быть использован сектор с радиусом, равным 4 см, угол сектора может быть 45-90°.
с роликом, с упругим элементом и регулятором момента срабатывания, а контакты перемещений закреплены симметрично от секГибкая связь выполняется из капронового щнурка, середина ее может быть закреплена на ролике. Подвижный сектор выполняется из пластмассы, на него наносится
щкала поворота угла в диапазоне -90...0... Напротив шкалы в крыщке выпол11ено смотровое отверстие диаметром 10 мм. Направляющая вилка может быть длиной 30 мм, а регулятор момента срабатывания выполняется из пластмассы в виде болта на конце с отверстием, где крепится упругий элемент. В качестве зуммера используют зуммеры от минибудильника «Луч.
15
Формула изобретения
1. Индикатор угловых перемещений биозвеньев спортсмена, содержащий узел угловых перемещений со средствами -крепления с сочленяющимися биозвеньями, сигиализа- 20 тор заданного угла, датчик положения бросковой руки, узел угловых перемеще ний в виде встроенных в корпус .с крыщкой двух контактов расположения элементов руки и элемента взаимодействия с ними, соединен25 ных через компенсирующий элемент с гибкой связью, гибкая связь через направляющие опоры для закрепления на кисти и фалангах указательного пальца прикреплена к конечной опоре для закрепления на третьей (ногтевой) фаланге указательного
30 пальца, элемент взаимодействия прикреплен к регулятору момента срабатывания зуммера через возвратный упругий элемент, а сигнализатор заданного угла перемещения биозвеньев содержит з ммер, последовательно соединенный с источником питания, с
35 контактом датчика положения бросковой руки, с контактом расположения элементов руки и сопротивлением, отличающийся тем, что, с целью расщиремия функциональных возможностей индикатора посредством фиксации взаимного расположения относительно
аи,пп
друг друга биозвеньев указате.тьного, средне ° друг друга биозвеньев указате.тьного, среднего пальцев и кисти бросковой руки, а также измерения угла поворота влево или вправо кисти во время броска, элемент взаимодействия выполнен в виде сектора и имеет жестко соединенный с ним ролик с кана- ла.ми под гибкую связь и контакты с тягами, гибкая связь узла угловых перемещений выполнена в виде симметричной гибкой тяги, другой конец которой прикреплен к третьей (ногтевой) фаланге среднего пальца, 50 для него имеется дополнительная конечная опора и дополнительный компенсирующий элемент, гибкая связь охватывает ролик, а ролик расположен на линии симметрии сектора, сектор имеет щтырь-толкатель, расположенный со стороны, противоположной роi.v..........-,.. , . , .,
55 лику, и направляющую вилку, связанную
лику, и направляющую вилку, связанную
с роликом, с упругим элементом и регулятором момента срабатывания, а контакты перемещений закреплены симметрично от сектора с возможностью подстройки, при этом на крышке внутри корпуса закреплен подвижный сектор со шкалой, имеющей треугольный вырез, для захода в него штыря-толкателя, имеет смотровое отверстие и фиксатор, на дуге сектора выполнены синусоидальные вырезы, а фиксатор имеет возможность контакта с вырезами, причем в сигнализаторе заданного угла к контакту расположения элементов руки и сопротивлению подсоединены параллельно второй контакт расположения элементов руки и сопротивление.
2. Индикатор по п. 1, отличающийся тем, что источник питания с контактом датчика положения бросковой руки, контакт расположения элементов руки и зуммер, второй контакт расположения элементов руки и дополнительный зуммер соединены параллельно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индикатор угловых перемещений биозвеньев спортсмена | 1985 |
|
SU1309992A1 |
| Устройство для тренировки броска мяча баскетболистов | 1987 |
|
SU1484355A1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ БАСКЕТБОЛЬНОГО БРОСКА | 2000 |
|
RU2153378C1 |
| Устройство для тренировки спортсменов-единоборцев | 1986 |
|
SU1331517A1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ БРОСКОВ БАСКЕТБОЛЬНОГО МЯЧА | 2016 |
|
RU2693812C1 |
| Устройство для тренировки спортсменов | 1981 |
|
SU1007686A1 |
| БАСКЕТБОЛЬНЫЙ ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ И СОВЕРШЕНСТВОВАНИЯ БРОСКА ПО КОРЗИНЕ | 2000 |
|
RU2163497C1 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ БРОСКА БАСКЕТБОЛЬНОГО МЯЧА | 2003 |
|
RU2248828C2 |
| СПОСОБ ОБУЧЕНИЯ СКОРОСТНОЙ СТРЕЛЬБЕ СПОРТСМЕНА-СТРЕЛКА | 1999 |
|
RU2148275C1 |
| Кистевой динамометр | 1990 |
|
SU1723465A1 |
Изобретение относится к спортивным тренажерам, в частности к устройствам для фиксирования правильного положения элементов руки при выполнении броска, и позволяет расширить функциональные возможности индикатора посредством фиксации (контроля) взаимного расположения относительно друг друга биозвеньев указательного, среднего пальцев и кисти бросковой руки, а также измерения угла поворота влево или вправо кисти во время броска. Индикатор угловых перемещений биозвеньев спортсмена содержит узел угловых перемещений со средствами крепления с сочленяющимися биозвеньями, сигнализатор заданного угла, датчик положения бросковой руки, узел угловых перемещений в виде встроенных в корпус с крышкой двух контактов расположения элементов руки и элемента взаимодействия с ними, последний выполнен в виде сектора и имеет жестко соединенный с ним ролик с каналами под гибкую связь и контакты с тягами. 1 з.п.ф-лы, 6 ил.
Фиг.1
2д
7J7
/ЧУ
J6 jj J2 75
Фг/г2
f5
/
Фиг. 5
,JJ 536
А-А
32
35 34
38
| Индикатор угловых перемещений биозвеньев спортсмена | 1985 |
|
SU1309992A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
