приемника .излучения, например ЭЛТ, и воздействия на отклоняющие системы ЭЛТ для осуществления развертки изображения края 3 структуры 1. При этом сначала получают п измерений при од- .нострочном разложении одного и того же элемента структуры 1 для уменьшения отношения сигнал/шум. Для учета шероховатости края 3 структуры пере1
Изобретение относится к способу и схеме для его осуществления, сЛу- жащик для контроля относительного положения, ширины или расстояния, а также качества микролитографически изготовленных структур благодаря автоматическому определению характеристики краев структур.
Изобретение может быть применено в микролитографии в электронно-лучевых приборах, служащих для измерения и контроля таких топологий структур. Структуры могут быть в качестве фо- торезистовых масок, в металлизированных оптических деталях из стекла или в качестве полупроводниковых дисков.
Известно использование для таких ;измерений светооптических измеритель- ных приборов проспекты фирмы Никон- Япония, относящиеся к Micro-Pattern Inspection Station или к Lasser Interferometric x-y Measuring Machine.
Однако эти методы возможны, если минимальные размеры или расстояния элементов не меньше нескольких микрометров. При этом интенсивный, световой пучок с прямоугольным поперечным сечением, узкая сторона которого имеет величину до 1 мкм, а длинная сто - рона - до нескольких тысяч микроме- тров, направляется по краю структуры, и проходящий или отраженный световой сигнал обрабатывается через фотодетекторы.
Недостатком является то, что измерения связаны с требованиями относительно геометрических форм измеряемых структур и тем самым значительно ограничивают многообразие.
мещают луч вдоль края многократно на uY, каждый раз ведя п измерений, а затем усредняют значение каждой из координат по всем измерениям. Частное от деления крутизны указанных кривых друг на друга и учете постоянной, установленной по тест-объекту, получают меру шероховатости края. 2 с.п. и 3 з.п. ф-лы, 8-ил.
Для контроля структур известно также использование электронно-лучевых приборов (DD-WP 124 091, кл. Н 01 J 37/26, 1979), при котором по .
принципу растрового электронного микроскопа по измеряемому объекту направляется тонкий электронный зонд,синхронно с ним на экране представляется изображение объекта, которое сравнивается с проектированной масштабной сеткой. Измерение производят при помощи масштабной сетки или путем определенного перемещения объекта при применении проектированной на люминесцентный экран контрольной отметки, р .
Недостатком этого способа является то, что производительность измерения слишком низка и точность измерения находится под субъективными влияниями.
Цель изобретения - измерение и контроль микролитографически изготовленных структур различной величины и
формы до ширин и расстояний структур в субмикронном пределе, Способ должен быть высокопроизводительным, протекать автоматически и без субъективных влияний.
В основу изобретения положена задача создать такой способ со схемой для его осуществления, позволяющий, с одной стороны, проводить измерение ширин структур в субмикронном преде- ле, с другой стороны, положить в основу обработки достаточно большое для требований точности количество отсчетов, чтобы получить вывод о качестве краев структур. При способе
определения характеристики краев
31310640
структур в измерительных приборах для
определения положения, размера или расстояния (как и качества) преимущественно микролитографически изготовленных топологий структур возника ющие при растрировании электронньм- лучом сигналы используются дпя регистрации краев структур, и электронный луч шаг за шагом направляется по измеряемому краю.
Способ осуществляют следующим .образом.
В перпендикулярном размеру края направлении свипа вдоль линии в постоянных заданных шагах точечно развертывают топологию структуры перемещением электронного луча, причем полученный в каждой точке сигнал оцифровывают и откладывают в ЗУ ЦВМ;Так как диаметр электронного зонда небольшой, регистрируют свойство края только в этой небольшой области и не предъявляют требования к линейному размеру края.
Шаг а многократно (п раз) повторяют, причем координаты свипа в направлении края не изменяют, чтобы улучшить отношение сигнал/шум полученного в а сигнала. Полученные в шагах а и б оцифрованные значения сигнала, относящиеся к одинаковым местам вдоль направления свипа, суммируют в одну кривую сигнала Для п различных мест на заданных расстояниях а вдоль края структуры, перпендикулярного направлению свипа повторяют шаг а,чтобы уменьшить влияние шероховатости края на измерительный сигнал. Полученные в-шаге г сигналы развертки оцифровывают и суммируют для всех точек развертки одинаковой координаты в направлении свипа. Полученный таким обра-, зом сигнал представляют в ввде пространственного среднего и среднего по времени через область края п-а. Расстояние а выбирают таким, чтобы перемещение свипа было приспособлено к размеру края, т.е. п-а i ,где i - размер края. При образовании сигналов в шаге д в случае конеч-- ной шероховатости края накладываются сигналы, перемещенные друг к другу в направлении свипа порядка шероховатости края. Результирующий сигнал края тем в общем более плоский, чем такой, при котором а 0.
Крутизна кривой сигнала, полученной по. в, т.е. для а О, делится на крутизну кривой сигнала, получен- т.е. для а i О, и, это
tt ir
д ,
ной по
частное связывается с установленной из тест-объектов постоянной. При этом возникает значение, которое является мерой для шероховатости края измеряемой структуры.
Для осуществления способа соглассно изобретению служит схема в электронно-лучевом приборе, в котором
электронный луч падает на измеряемую структуру и в зависимости от этой структуры образованный из выходящих электронов сигнал подводится к приемнику. Схема отличается следующими признаками.
Сигнал приемника, который относительно величины может быть очень различным и содержит мешающий основной уровень, подводится к нормирующему звену. Нормированный сигнал в аналсг о-цифровом преобразователе, в который через стробир тощую схему вводятся данные из центрального устройства ЦВМ, оцифровывается и подводится к центральному устройству.
Перемещение электронного луча для направляющих х- и у-координаты предусмотрено по одному счетчику положе
говый преобразователи и оконечные
усилители положение электронного лу- , ча через отклоняющую систему. На один вход каждого счетчика положения подают информацию о начальных или конечных значениях в направлении свипа. При достижении конечного значения счетчика положения производится сообщение центральному устройству. Одновременно счетчик положения возвращается к начальному значению и выдается тактовый импульс счетчику положения второго координатного направления. Благодаря этому возможен новый свип развертки на строке, параллельной предьдущей строке, причем обе строки имеют заданное расстояние а. Между обоими счетчиками положения находится электронное переключающее устройство для выбора свипов развертки в направлениях х- или у-координаты. При этом в качестве тактовых импульсов служат импульсы ввода оцифровывания сигналов, которые, кроме того, через звено задержки в качестве на
J5
ального сигнала подводятся к аналоо-цифровому преобразователю.
Импульсом ввода оцифрованный сиг- ал принимается в центральное устойство. Задний фронт этого импуль- 5 са повышает счетчик положения, и электронный луч занимает следующее положение. После времени задержки пускается аналого-цифровой преобразователь и оцифровывается новое зна- О чение сигнала.
Для сглаживания зашумленных сигналов служит предвключенный перед нормирующим звеном фильтр нижних частот, постоянная времени которого согласована с временем задержки аналого-цифрового преобразователя.
Для улучшения сигнала края относительно возможности обработки выгодно, если сигналы различных при- 20 емников аддитивно или субтративно смешиваются.
Для улучшения точности позиционирования электронного луча служат следующие признаки схемы.25
Приспособление величины шага к измеряемой структуре и к чувствительности отклонения отклоняющей системы производится через каскад умножителя импульсов и цифроустанавли- 30 ваемое аналоговое демпфирующее звено.
Наклонное положение объекта относительно направления отклоняющих систем учитывается блоками вращающей коррекции. Счетчик положения с установкой величин шага и быстрым циф- роаналоговым преобразователем ис-
пользуется только для собственного 40 растрового свинца симметрично относительно предполагаемого положения края, и основное отклонение луча относительно предполагаемого положения края устанавливается вторым цифро- аналоговым преобразователем до начала ряда измерений. Этот цифроанало- говый преобразователь точнее и мед- ленее, его выходной сигнал аддитивно прибавляется к растрйрованному отклоняющему напряжению.
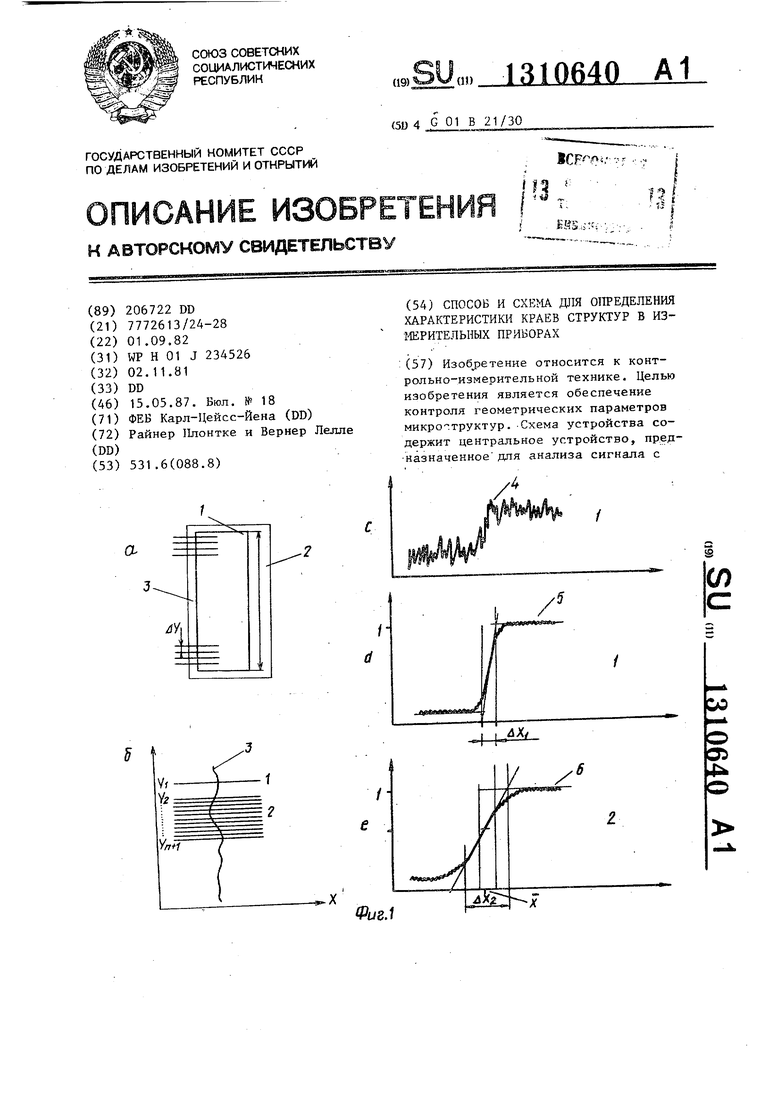
На фиг.1 представлена характеристика краев структур: на фиг.2 - схема регистрации краев структур; на фиг.З схема улучшения сигнала края; на фиг.4 - схема улучшения позиционирования электронного луча. 1 . .
Решение данной схемы регистрации
краев структур исходит из того, что
45
50
55
0
5
0
0
5
0
5
электронный луч перемещается и полученный приемником сигнал оцифровывается. На фиг.1 а в поперечном сечении показана структура 1 на подложке 2.
На фиг.1 b представлен край структуры 3, который следует измерить.Для положения краев структуры было выбрано направление у-координаты. Перпендикулярно тому расположено направление свипа, в котором край структуры 3 развертывают в заданных шагах, например 5 нм. Полученный в каждой точке развертки сигнал из обратнорас- сеянных электронов, вторичных электронов или смещения обоих электронов оцифровывают и накапливают. Так как диаметр электронного зонда небольшой, т.е. обычно 10 нм, регистрируют край только в этой небольшой области, не предъявляя требования к линейному раз- размеру края. Время прибывания на точку составляет, например 4 мкс. Из- за небольшого количества регистрированных электронов сигнал 4 (фиг.1 с) имеет небольшое отноп:ение сигнал/шум. Что бы улучшить это отношение (при у пост.) развертку п раз (например, п 50) повторяют и оцифрованные значения сигнала суммируют в одну кривую сигнала 5 (фиг.1 d). Регистрация края продолжается п 2 с
о;1 с.
При этом виде образования сиг на- лов не учитывают шероховатости края. Поэтому после свипа..развертки при У( в каждом случае после перемещения электронного луча вдоль направления оси у на проводят п дальнейших измерений. Возникшие сигналы накладывают в кривую сигналов 6 (фиг.1 е), представляющую собой пространствен- ное среднее и среднее по времени через область края п-ду, причем ду выбирают так, что (i размер края). Крутизна кривой сигнала 5 делится на крутизну кривой сигнал-а 6, и это частное связывается с посто-- янной, которая бьта установлена из тест-объектов. При этом возникает значение, которое является мерой для шероховатости края.
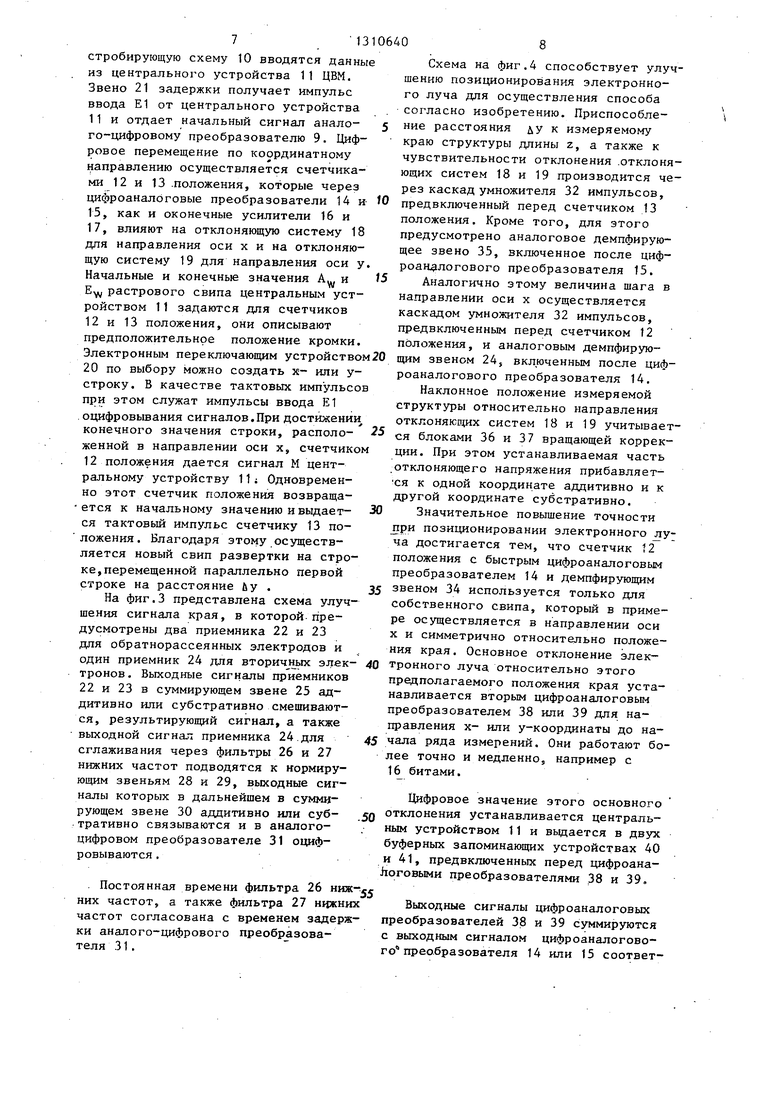
На фиг.2 приведена схема для осуществления способа, по которой олг- нал триемника 7 в нормирующем звене 8 нормируется аддитивным перемещением уровня и мультипликативньм изменением усиления. Для оцифровывания этого сигнала служит аналого-цифровой преобразователь 9, в который через
7 131064
стробирующую схему 10 вводятся данные из центрального устройства 11 ЦВМ. Звено 21 задержки получает импульс ввода Е1 от центрального устройства 11 и отдает начальный сигнал анало- j го-цифровому преобразователю 9. Цифровое перемещение по координатному направлению осуществляется счетчиками 12 и 13 .положения, которые через цифроаналоговые преобразователи 14 и- О 15, как и оконечные усилители 16 и 17, влияют на отклоняющую систему 18 для направления оси х и на отклоняющую систему 19 для направления оси у.
Начальные и конечные значения А и
J5
Аналогично этому величина шага в направлении оси х осуществляется каскадом умножителя 32 импульсов, предвключенным перед счетчиком 12 положения, и аналоговым демпфируюЕуу растрового свипа центральным устройством 11 задаются для счетчиков 12 и 13 положения, они описывают предположительное положение кромки. Электронным переключающим устройством20 щим звеном 24, включенным после циф- 20 по выбору можно создать х- или у- роаналогового преобразователя 14. строку. В качестве тактовых импульсов Наклонное положение измеряемой при этом служат импульсы ввода Е1 структуры относительно направления
,оцифровьшания сигналов.При достижении отклоняювдих систем 18 и 19 учитывает- конечного значения строки, располо- 25 я блоками 36 и 37 вращающей коррек- женной в направлении оси х, счетчиком ции. При этом устанавливаемая часть 12 положения дается сигнал М центральному устройству 11i Одновременно этот счетчик положения возвращается к начальному значению ивьщает- ся тактовый импульс счетчику 13 положения . Благодаря этому осуществляется новый свип развертки на строке, перемещенной параллельно первой
30
отклоняющего напряжения прибавляет- ся к одной координате аддитивно и к другой координате субстративно.
Значительное повышение точности при позиционировании электронного луча достигается тем, что счетчик 12 положения с быстрым цифроаналоговым преобразователем 14 и демпфирующим 35 звеном 34 используется только для собственного свипа, который в примере осуществляется в направлении оси X и симметрично относительно положения края. Основное отклонение элекстроке на расстояние йу .
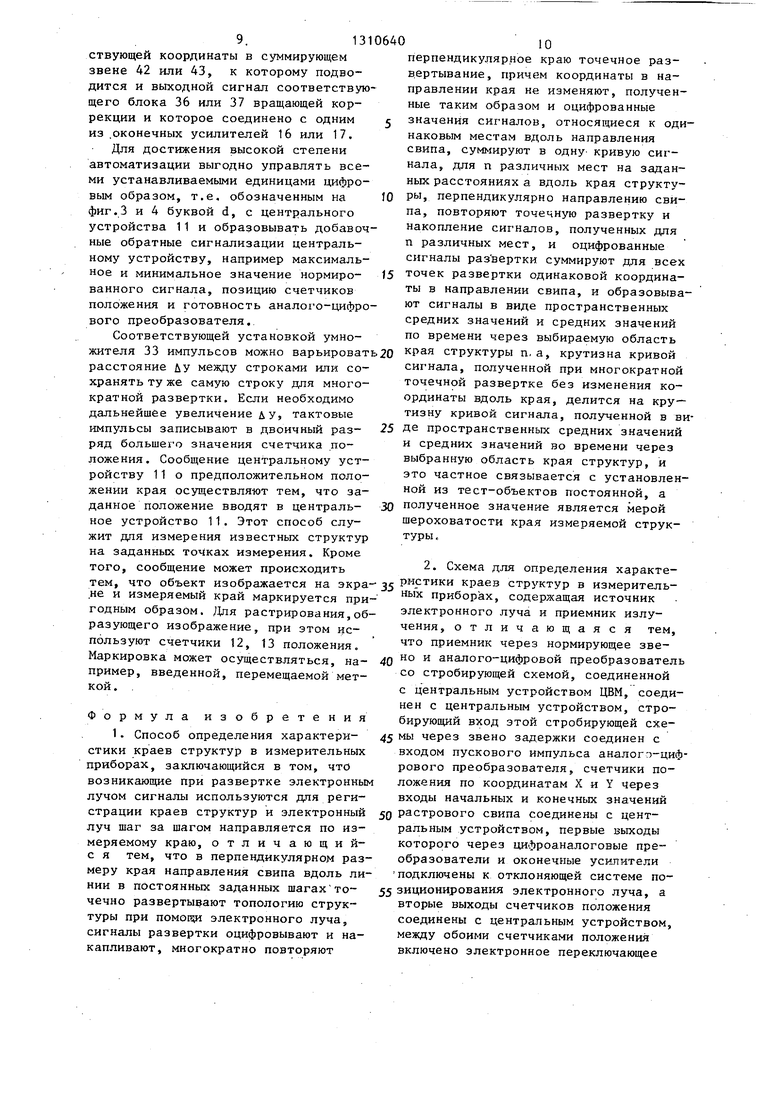
На фиг.З представлена схема улучшения сигнала края, в которой предусмотрены два приемника 22 и 23 дпя обратнорассеянных электродов и
один приемник 24 для вторичных элек- 40 тронного луча относительно этого
тронов. Выходные сигналы приемников 22 и 23 в суммирующем звене 25 аддитивно или субстративно смешиваются, результирующий сигнал, а также вькодной сигнал приемника 24.для сглаживания через фильтры 26 и 27 нижних частот подводятся к нормирующим звеньям 28 и 29, выходные сигналы которых в дальнейшем в суммирующем звене 30 аддитивно или суб- тративно связываются и в аналого- цифровом преобразователе 31 оцифровываются .
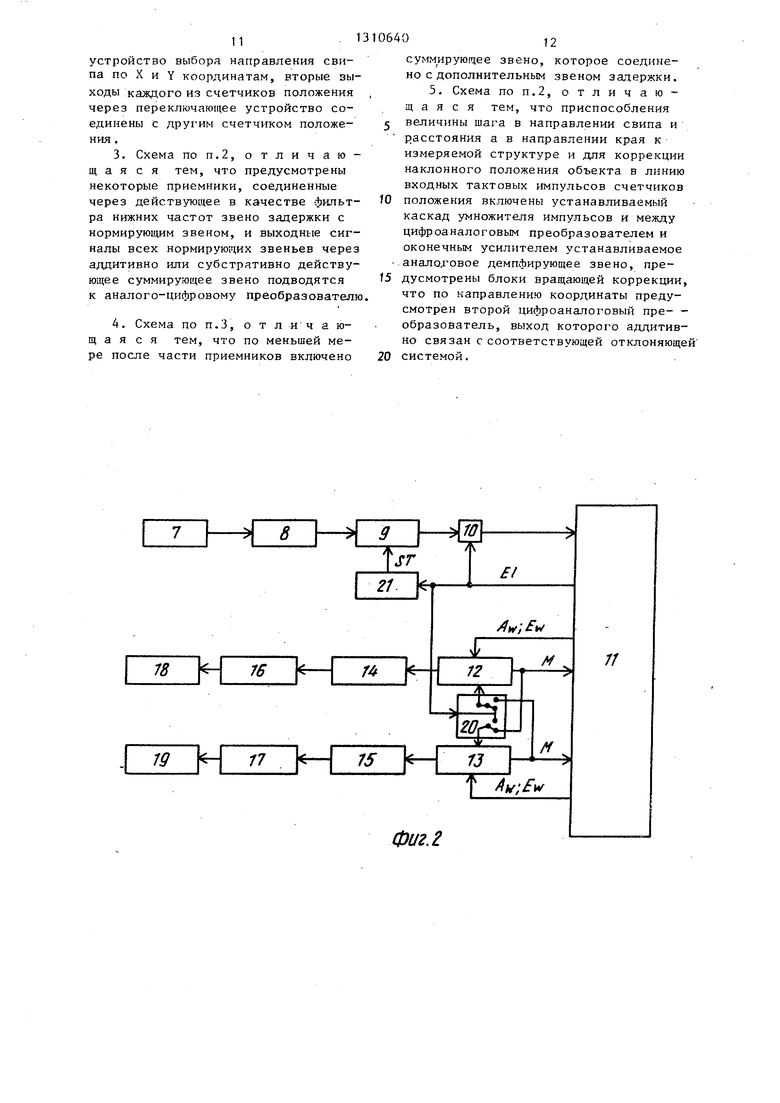
предполагаемого положения края устанавливается вторым цифроаналоговым преобразователем 38 или 39 для направления х- или у-координаты до на- 45 чала ряда измерений. Они работают более точно и медленно, например с 16 битами.
Цифровое значение этого основного JQ отклонения устанавливается центральным устройством 11 и вьщается в двух буферных запоминакнцих устройствах 40 и 41, предвключенных перед цифроана- Логовыми преобразователями 38 и 39, . Постоянная времени фильтра 26 нижних частот, а также фильтра 27 нчжник Выходные сигналы цифроаналоговых частот согласована с временем задерж- преобразователей 38 и 39 суммируются ки аналого-цифрового преобразова- с выходным сигналом цифроаналогово- теля 31.го прео.бразователя 14 или 15 соответСхема на фиг.4 способствует улучшению позиционирования электронного луча для осуществления способа согласно изобретению. Приспособление расстояния ду к измеряемому краю структуры длины z, а также к
j О
5
чувствительности отклонения .отклоняющих систем 18 и 19 производится через каскад умножителя 32 импульсов, предвключенный перед счетчиком 13 положения. Кроме того, для этого предусмотрено аналоговое демпфирующее звено 35, включенное после циф- роаа логового преобразователя t5.
Аналогично этому величина шага в направлении оси х осуществляется каскадом умножителя 32 импульсов, предвключенным перед счетчиком 12 положения, и аналоговым демпфирую0 щим звеном 24, включенным после циф- роаналогового преобразователя 14. Наклонное положение измеряемой структуры относительно направления
отклоняювдих систем 18 и 19 учитывает- я блоками 36 и 37 вращающей коррек- ции. При этом устанавливаемая часть
отклоняющего напряжения прибавляет- ся к одной координате аддитивно и к другой координате субстративно.
Значительное повышение точности при позиционировании электронного луча достигается тем, что счетчик 12 положения с быстрым цифроаналоговым преобразователем 14 и демпфирующим звеном 34 используется только для собственного свипа, который в примере осуществляется в направлении оси X и симметрично относительно положения края. Основное отклонение элекпредполагаемого положения края устанавливается вторым цифроаналоговым преобразователем 38 или 39 для направления х- или у-координаты до на- 45 чала ряда измерений. Они работают более точно и медленно, например с 16 битами.
ствующей координаты в суммирующем звене 42 или 43, к которому подводится и выходной сигнал соответствующего блока 36 или 37 вращающей коррекции и которое соединено с одним из .оконечных усилителей 16 или 17. Для достижения высокой степени автоматизации выгодно управлять всеми устанавливаемыми единицами цифровым образом, т.е. обозначенным на фиг.З и 4 буквой d, с центрального устройства 11 и образовывать добавочные обратные сигнализации центральному устройству, например максимальное и минимальное значение нормированного сигнала, позицию счетчиков положения и готовность аналого-цифрового преобразователя.
J5 точек развертки одинаковой координаты в направлении свипа, и образовыва ют сигналы в виде пространственных средних значений и средних значений по времени через выбираемую область
Соответствующей установкой умножителя 33 импульсов можно варьировать20 края структуры п, а, крутизна кривой расстояние ДУ между строками или со- сигнала, полученной при многократной хранять ту же самую строку для многократной развертки. Если необходимо дальнейшее увеличение ду, тактовые импульсы записывают в двоичный разряд большего значения счетчика положения. Сообщение центральному устройству 11 о предположительном положении края осуществляют тем, что заточечнрй развертке без изменения координаты вдоль края, делится на крутизну кривой сигнала, полученной в в
25 де пространственных средних значений и средних значений во времени через выбранную область края структур, и это частное связывается с установленной из тест-объектов постоянной, а
30 полученное значение является мерой шероховатости края измеряемой структуры ,
данное положение вводят в центральное устройство 11. Этот способ служит дпя измерения известных структур на заданных точках измерения. Кроме того, сообщение может происходить тем, что объект изображается на экра- 35 краев структур в измеритель- не и измеряемый край маркируется при- приборах, содержащая источник
2. Схема для определения характегодным образом. Дпя растрирования,образующего изображение, при этом используют счетчики 12, 13 положения.
кой.
электронного луча и приемник излучения, отличающаяся тем, что приемник через нормирующее зве- Маркировка может осуществляться, на- 40 ° аналого-цифровой преобразователь пример, введенной, перемещаемой мет- ° стробирующей схемой, соединенной
с центральным устройством ЦВМ, соединен с центральным устройством, стро- бирующий вход этой стробирующей схе- 45 мь через звено задержки соединен с входом пускового импульса аналого-цифрового преобразователя, счетчики положения по координатам X и Y через
Формула изобретения
1. Способ определения характеристики краев структур в измерительных приборах, заключающийся в том, что возникающие при развертке электронным
лучом сигналы используются дпя реги- входы начальных и конечных значений страции краев структур и электронный 50 растрового свипа соединены с цент- луч шаг за шагом направляется по из- ральным устройством, первые выходы меряемому краю, отличающий- которого через цифроаналоговые пре- с я тем, что в перпендикулярном раз- образователи к оконечные усилители меру края направления свипа вдоль ли- подключены к отклоняющей системе по- нии в постоянных заданных шагах то- зицконирования электронного луча, а чечно развертывают топологию струк- вторые выходы счетчиков положения туры при помощи электронного луча, соединены с центральным устройством, сигналы развертки оцифровывают и на- между обоими счетчиками положения капливают, многократно повторяют включено электронное переключающее
перпендикулярное краю точечное развертывание, причем координаты в направлении края не изменяют, полученные таким образом и оцифрованные
значения сигналов, относящиеся к одинаковым местам вдоль направления свипа, суммируют в одну- кривую сигнала, для п различных мест на заданных расстояниях а вдоль края структуРЬ перпендикулярно направлению свипа, повторяют точечную развертку и накопление сигналов, полученных дпя п различных мест, и оцифрованные сигналы развертки суммируют для всех
точек развертки одинаковой координаты в направлении свипа, и образовывают сигналы в виде пространственных средних значений и средних значений по времени через выбираемую область
края структуры п, а, крутизна кривой сигнала, полученной при многократной
края структуры п, а, крутизна кривой сигнала, полученной при многократной
точечнрй развертке без изменения координаты вдоль края, делится на крутизну кривой сигнала, полученной в виде пространственных средних значений и средних значений во времени через выбранную область края структур, и это частное связывается с установленной из тест-объектов постоянной, а
полученное значение является мерой шероховатости края измеряемой структуры ,
краев структур в измеритель- приборах, содержащая источник
краев структур в измеритель- приборах, содержащая источник
2. Схема для определения характеустройство выбора направления свн- па по X и Y координатам, вторые выходы каждого из счетчиков положения через переключающее устройство соединены с друг им счетчиком положения .
3.Схема по п.2, отличающая с я тем, что предусмотрены некоторые приемники, соединенные через действующее в качестве фильтра нижних частот звено задержки с нормирующим звеном, и выходные сигналы всех нормирующих звеньев через аддитивно или субстративно действующее суммирующее звено подводятся
к аналого-цифровому преобразователю
4.Схема по п.З, о т л и ч а ю- щ а я с я тем, что по меньшей мере после части приемников включено
суммируюпдее звено, которое соединено с дополнительным звеном задержки. 5. Схема по п.2, отличающаяся тем, что приспособления
величины шага в направлении свипа и расстояния а в направлении края к измеряемой структуре и для коррекции наклонного положения объекта в входных тактовых импульсов счетчиков
положения включены устанавливаемый каскад умножителя импульсов и между цифроаналоговым преобразователем и оконечным усилителем устанавливаемое aHanoj oBoe демпфирующее звено, предусмотрены блоки вращающей коррекции, что по направлению координаты предусмотрен второй цифроаналоговый пре- - образователь, выход которого аддитивно связан с соответствующей отклоняющей
системой.
1J
Редактор Л.Повхан Техред А.Кравчук
1879/36
Тираж 678Подписное,
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
I
/A
30
31
ф(/гА
Корректор, М.Пожо
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| Рентгеновский дефектоскоп | 1977 |
|
SU949438A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339938C1 |
| Устройство для контроля параметров | 1976 |
|
SU638918A1 |
| Генератор символов | 1980 |
|
SU883952A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Сканирующее устройство для воспроизведения изображения образца | 1984 |
|
SU1236568A1 |
| СИСТЕМА УПРАВЛЕНИЯ СВЕДЕНИЕМ ДЛЯ МНОЖЕСТВА ВЕРТИКАЛЬНЫХ ФОРМАТОВ | 1990 |
|
RU2108686C1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| Устройство для регистрации информации | 1976 |
|
SU634313A1 |
Изобретение относится к контрольно-измерительной технике. Целью изобретения является обеспечение контроля геометрических параметров микро.труктур. -Схема устройства содержит центральное устройство, предназначенное для анализа сигнала с У2 fB (Л