Изобретение относится к телевизионной технике и может быть использовано для определения координат центра малоразмерных объектов.
Цель изобретения - повышение точности измерений.
На фиг. 1 представлена электрическая структурная схема телевизионного измерителя координат; на фиг. 2 - то же, цифрового дискриминатора; на фиг. 3 - то же, корректора; на фиг. 4 - временные диаграммы.
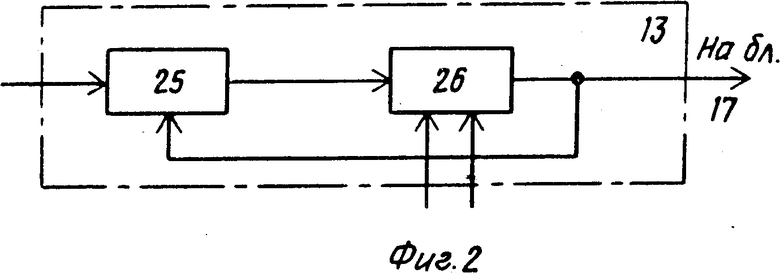
Телевизионный измеритель координат (фиг. 1) содержит фотоэлектронный преобразователь (ФЭП) 1, видеоусилитель 2, генератор 3 тактовых импульсов (ГТИ), счетчик 4 адреса, формирователь 5 опорного сигнала, дешифратор 6, счетный триггер 7, идентичные канал 8 формирования координаты х и канал 9 формирования координаты y, каждый из которых содержит формирователь 10 сигнала локальной развертки, цифровой интегратор 11, первый элемент И 12, цифровой дискриминатор 13, формирователь 14 импульсов записи, второй элемент И 15, счетчик 16, делитель 17, первый регистр 18, корректор 19, масштабирующий блок 20, сумматор 21, второй регистр 22, первый и второй цифроаналоговые преобразователи (ЦАП) 23 и 24. Цифровой дискриминатор 13 (фиг. 2) содержит сумматор 25 и регистр 26. Корректор 19 (фиг. 3) содержит умножитель 27, сумматор 28, блок 29 элементов И, блок 30 элементов И, блок 31 выделения знака, блок 32 выделения модуля, блок 33 выделения знака, умножитель 34, блок 35 вычитания, блок 36 элементов И.
Телевизионный измеритель координат работает следующим образом.
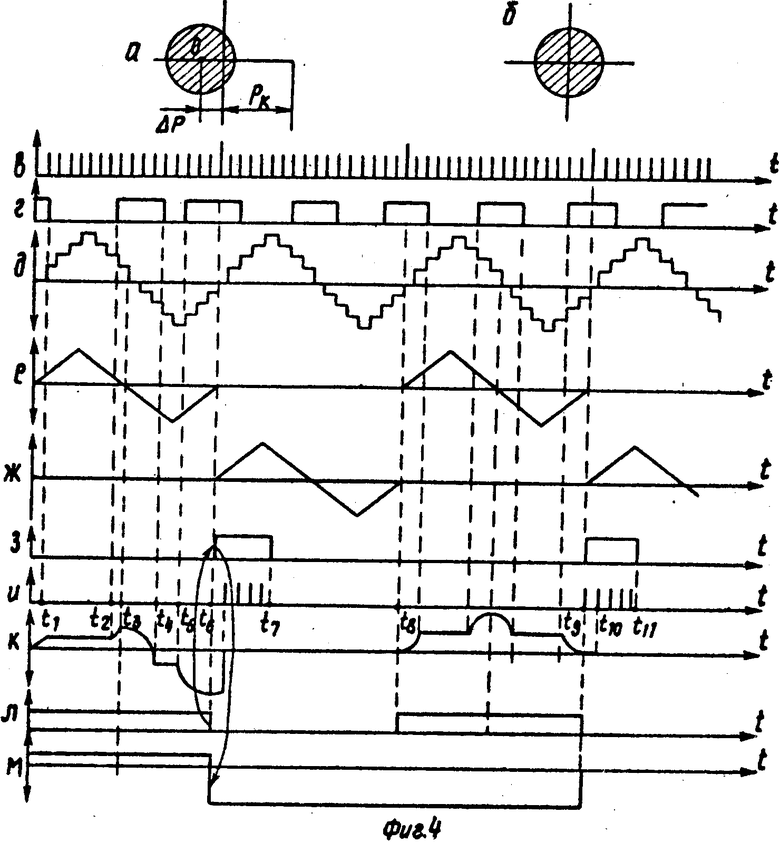
В его структуру не включены блоки, обеспечивающие режим поиска объекта и фиксацию обнаружения по заданным априорным сведениям. Рассматривается режим слежения, когда изображение объекта разворачивается локальной крестообразной траекторией (фиг. 4а, б). Траектория сканирования задается выходным сигналом формирователя 10, который, преобразуясь во втором ЦАП 24 в аналоговую форму, поступает в отклоняющие катушки ФЭП 1. Постоянная скорость развертывающей апертуры (фиг. 4е, ж) обеспечивается уровнем выходного сигнала формирователя 10, имеющего цифровую реализацию на программируемых элементах памяти. Считывание внесенного в ячейки памяти формирователя 10 уровня сигнала, задающего траекторию развертки, обеспечивается текущим адресом на выходе счетчика 4. Цикличность развертки обеспечивается соответствием емкости счетчика 4 числу z. При частоте локальной развертки Fкр величина дискретизации по времени определяется частотой F1 = = 2Fкрz, где F1 - тактовая частота генератора 3 (фиг. 4в). Дешифратор 6 выделяет z-импульсы, которые поступают на вход счетного триггера 7, обеспечивающего коммутацию каналов. Выходной уровень счетного триггера 7, поступающий на вход формирователя 10, используется как сигнал запрета считывания в тех случаях, когда можно пренебречь инерционностью отклоняющей системы (временное положение и форма выходного сигнала формирователя 10 линейно связана с временным положением и траекторией развертки).
В случае необходимости формирования предыскаженного сигнала, временное положение которого не укладывается в интервал полукадра, этот сигнал используется для формирования адресов, порядковый номер которых превышает z. Синхронно с траекторией развертки на выходе формирователя 5 в цифровом виде вырабатывается пилообразный опорный сигнал (фиг. 4д, е, ж). Синхронность обеспечивается реализацией формирователя 5 на программируемых элементах и привязкой к выходному сигналу счетчика 4. Таким образом, при крестообразной локальной развертке изображения объекта на выходе ФЭП 1 формируется видеосигнал, который квантуется усилителем 2 (фиг. 4г). Ошибка рассогласования Uр в каждом кадре формируется на выходе цифрового дискриминатора 13 при наличии тактовых импульсов с выхода первого элемента И 12. Выходной сигнал цифрового дискриминатора 13 нормируется к длительности видеосигнала τв, которая в каждом кадре фиксируется счетчиком 16. Таким образом, при выходном сигнале цифрового дискриминатора 13, равном Uр (фиг. 4к) на выходе делителя 17 формируется уровень Uп = Uр/ τв. Нормированная выходная величина Uн записывается в первый регистр 18 по переднему фронту импульса записи с выхода формирователя 14, который вырабатывается после отключения канала 8 (9) (фиг. 4з, л, м).
Переход к откорректированной дискриминационной характеристике обеспечивается корректором 19. По входному сигналу Uн на выходе последнего формируется уровень Uк, соответствующий уровню, близкому к идеальной характеристике. Скорректированный сигнал ошибки рассогласования Uк через масштабирующий блок 20 поступает на вход цифрового интегратора 11, запись в который осуществляется лишь при наличии тактовых импульсов на выходе второго элемента И 15 (фиг. 4и). В каждом кадре эти же импульсы обеспечивают нулевую установку состояний цифрового дискриминатора 13 и счетчика 16. Масштабирующий блок 20 обеспечивает соответствие выходной величины Uк' ошибке рассогласования Uк' = UкМк, где Мк - масштабирующий коэффициент, зависящий от исходного масштаба выходного сигнала формирователя 5, масштаба локальной развертки Рк и соотношения частот F2/F1 на выходах генератора 3 тактовых импульсов. При фиксированных значениях указанных параметров операция масштабирования Uк может быть сведена к сдвигу разрядной сетки корректора 19 на q разрядов в сторону младших разрядов. Точность измерения координат определяется и верхней границей частоты F2 тактовых импульсов с выхода генератора 3 (F2 = KF1), где К придают целочисленное значение в диапазоне 1-10. Реальное значение верхней границы ограничивается достигаемой степенью постоянства скорости развертки при дискретных значениях формирующего сигнала с выхода формирователя 10.
В каждом кадре ошибка рассогласования Uк' записывается в цифровой интегратор 11 посредством m тактовых импульсов. В этом случае исходный записываемый сигнал должен иметь величину Uк'/m. Значение величины m ограничивается разумной величиной дополнительной разрядности цифрового интегратора 11. Так как операция деления Uк'/m наиболее просто выполняется посредством параллельного сдвига разрядной сетки масштабирующего блока 20 в сторону младших разрядов цифрового интегратора 11, то m должно быть равным 2n, где n - число разрядов сдвига.
Съем информации о координатах объекта в каждом кадре производится с выхода сумматора 21, на выходы которого поступает информация о координате геометрического центра развертки и величине текущего рассогласования геометрического центра объекта и развертки. Координата геометрического центра развертки заносится на второй регистр 22 в момент t5, t9 переключения триггера 7 (фиг. 4л), т. е. до начала записи новой информации. Основное требование к второму регистру 22 - это одинаковая разрядность с первым ЦАП 23, в то время как цифровой интегратор 11 (в зависимости от требований конкретного задания к коэффициенту передачи следящего контура) может иметь значительно большую разрядность. Таким образом, на выходе сумматора 21 координаты объекта фиксируются в каждом кадре практически мгновенно независимо от коэффициента передачи следящего контура. Работа корректора 19 основана на различии в прохождении сигнала в зависимости от знака рассогласования | Uн| - | Uп| , где Uп - потенциал точки перегиба дискриминационной характеристики. Инвариантность к знаку ошибки рассогласования Uн обеспечивается включением на входе корректора 19 блока 32 выделения модуля входного сигнала. Если | Uн| > | Uп | , то на прямом выходе блока 31 выделения знака появляется сигнал, разрешающий прохождение разности | Uн | - | Uп | с выхода блкоа 35 вычитания на вход первого блока 36 элементов И.
Одновременно сигнал разрешения поступает на вход блока 29 элементов И, обеспечивая прохождение уровня | Uп| на вход сумматора 28. На другой вход сумматора 28 с выхода умножителя 27 поступает величина ( | Uн | - | Uп | )Кр, где Кр - коэффициент, отражающий различие в крутизне реальной и идеальной дискриминационных характеристик.
Таким образом, на выходе сумматора 28 имеем величину | Uк | . Знак скорректированного сигнала восстанавливается на выходе умножителя 34, на второй вход которого подается выделенный блоком 33 знак входной реализации. Если | Uн| ≅ | Uп| , то сигнал разрешения появляется на инверсном выходе блока 31, который разрешает прохождение | Uн | на выход блока 30 элементов И. Так как на входах сумматора 28 в этом режиме устанавливаются нулевые потенциалы, то уровень | Uн | без искажений проходит на вход корректора 19. Структура цифрового интегратора 11 аналогична реализации цифрового дискриминатора 13, но не используется вход нулевой установки. (56) Авторское свидетельство СССР N 811302, кл. G 06 K 11/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ "ТОМЬ" | 1992 |
|
RU2010434C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |

Изобретение относится к телевидению. Цель изобретения - повышение точности измерения координат. Измеритель содержит фотоэлектронный преобразователь 1, видеоусилитель 2, генератор 3 тактовых импульсов, счетчик 4, формирователь 5 опорного сигнала, дешифратор 6, счетный триггер 7 и каналы 8 и 9 формирования координат x и y, каждый из которых состоит из формирователя 10 сигнала локальной развертки, цифрового интегратора 11, элементов И 12 и 15, цифрового дискриминатора 13, формирователя 14 импульсов записи, счетчика 16, делителя 17, регистров 18 и 22, корректора 19, масштабирующего блока 20, сумматора 21 и ЦАП 23 и 24. При крестообразной локальной развертке изображения объекта на выходе преобразователя 1 формируется видеосигнал, который квантуется усилителем 2 и поступает в каналы 8 и 9. В этих каналах 8 и 9 практически мгновенно и независимо от коэффициента передачи следящего контура осуществляется съем информации о координатах объекта в каждом кадре с выхода сумматора 21, на входы которого поступает информация о координате геометрического центра развертки и величине текущего рассогласования геометрического центра объекта и развертки. 4 ил.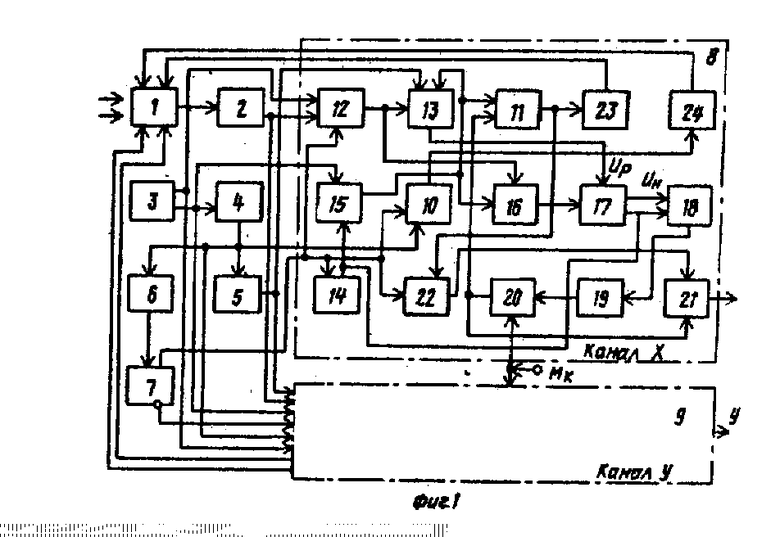
ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ , содеpжащий последовательно соединенные фотоэлектpонный пpеобpазователь (ФЭП) и видеоусилитель, канал фоpмиpования кооpдинаты x и идентичный ему канал фоpмиpования кооpдинаты y, сигнальные выходы котоpых являются сигнальными выходами телевизионного измеpителя кооpдинат, а пеpвый упpавляющий выход каждого из котоpых соединен с соответствующим упpавляющим входом ФЭП, генеpатоp тактовых импульсов, фоpмиpователь опоpного сигнала, счетный тpиггеp, а каналы фоpмиpования кооpдинаты - пеpвый цифpоаналоговый пpеобpазователь (ЦАП), выход котоpого является пеpвым упpавляющим выходом канала фоpмиpования кооpдинаты, а также счетчик и пеpвый pегистp, отличающийся тем, что, с целью повышения точности, введены последовательно соединенные счетчик, вход котоpого соединен с пеpвым выходом генеpатоpа тактовых импульсов, и дешифpатоp, выход котоpого соединен с входом счетного тpиггеpа, пpямой и инвеpсный выходы котоpого соединены с пеpвыми упpавляющими входами соответственно канала фоpмиpования кооpдинаты x и канала фоpмиpования канала y, втоpые упpавляющие входы котоpых соединены с втоpым выходом генеpатоpа тактовых импульсов, тpетьи упpавляющие входы соединены с выходом фоpмиpователя опоpного сигнала, вход котоpого объединен с четвеpтыми упpавляющими входами каналов фоpмиpования кооpдинаты, с входом дешифpатоpа и соединен с выходом счетчика адpеса, вход котоpого объединен с пятыми упpавляющими входами каналов фоpмиpования кооpдинаты, сигнальные входы котоpых соединены с выходом видеоусилителя, а втоpые упpавляющие выходы соединены с соответствующими упpавляющими входами ФЭП, а в каждый из каналов фоpмиpования кооpдинаты - последовательно соединенные пеpвый элемент И, пеpвый и втоpой входы котоpого являются соответственно втоpым упpавляющим и сигнальным входами канала фоpмиpования кооpдинаты, цифpовой дискpиминатоp и делитель, выход котоpого соединен с сигнальным входом пеpвого pегистpа, последовательно соединенные коppектоp, вход котоpого соединен с выходом пеpвого pегистpа, масштабный блок и цифpовой интегpатоp, выход котоpого соединен с входом пеpвого цифpоаналогового пpеобpазователя, последовательно соединенные pегистp, сигнальный вход котоpого соединен с выходом цифpового интегpатоpа, и сумматоp, втоpой вход котоpого соединен с выходом масштабного блока, а выход является сигнальным выходом канала фоpмиpования кооpдинаты, последовательно соединенные фоpмиpователь импульсов записи и втоpой элемент И, втоpой вход котоpого является пятым упpавляющим входом канала фоpмиpования кооpдинаты, а выход соединен с втоpыми входами цифpового интегpатоpа, счетчика, последовательно соединенные фоpмиpователь сигнала локальной pазвеpтки, пеpвый вход котоpого является четвеpтым упpавляющим входом канала фоpмиpования кооpдинаты, втоpой вход объединен с тpетьим входом пеpвого элемента И, с упpавляющим входом втоpого pегистpа, с входом фоpмиpователя импульсов записи и является пеpвым упpавляющим входом канала фоpмиpования кооpдинаты, и втоpой цифpоаналоговый пpеобpазователь, выход котоpого является втоpым упpавляющим выходом канала фоpмиpования кооpдинаты, пpи этом выход фоpмиpователя импульсов записи соединен с упpавляющим входом пеpвого pегистpа, а дpугой вход масштабного блока является входом задания масштабиpующего коэффициента.
