Изобретение относится к технике магнитных измерений и может быть использовано, в частности, для контроля параметров магнитных покрытий носителей магнитной записи.
. Цель изобретения - расширение функциональных возможностей способа, а именно обеспечение возможности контроля свойств локальных участков покрытия без нарушения его целостное- ти, контроля толщины покрытия и определения его характеристик в перпендикулярном направлении.
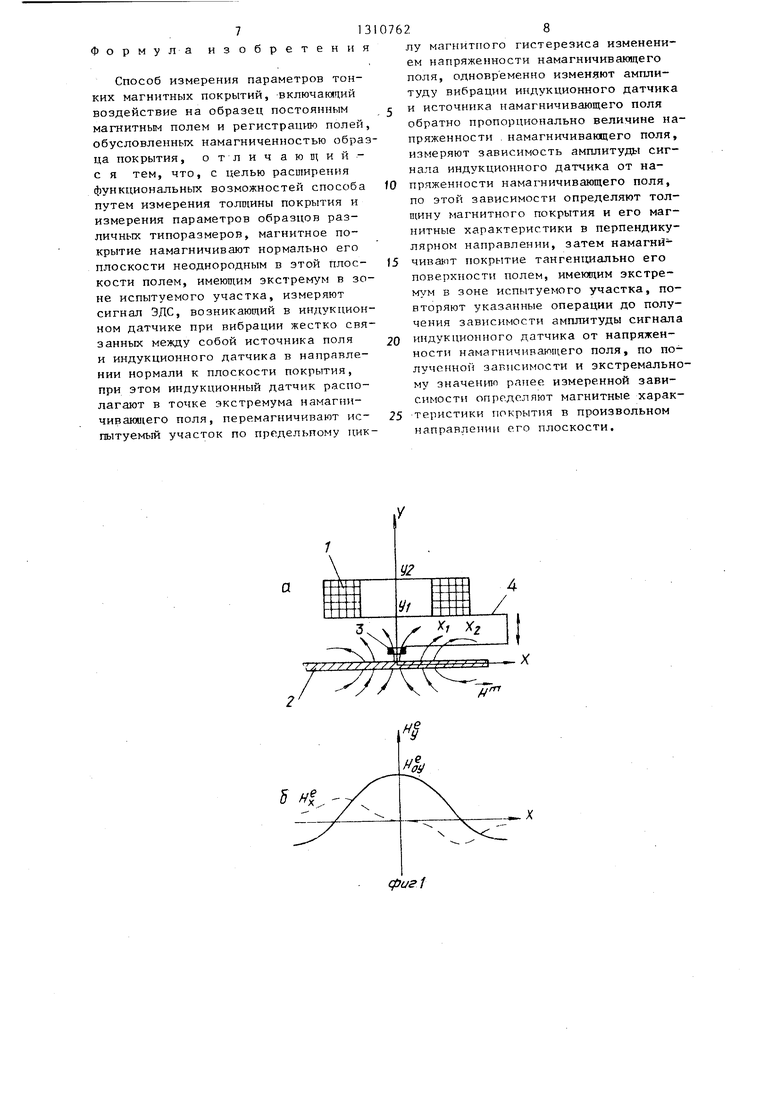
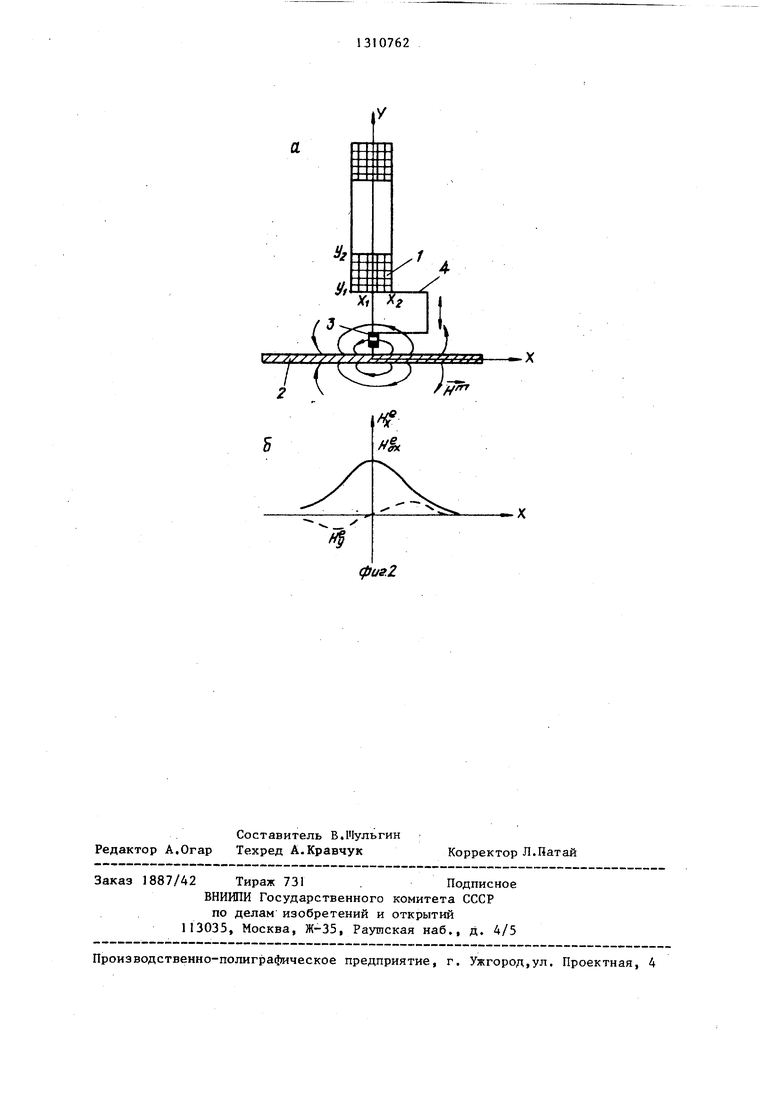
На фиг. 1 представлены схема реализации способа при определении тол щины. покрытия и его магнитных характеристик в перпендикулярном направлении (а) и распределения составляющих намагничивающего поля (&); на фиг. 2 - схема реализации спосо- ба при определении параметров в его плоскости (а) и соответствующие распределения составляющих намагничивающего поля (5).
На фиг. 1 и 2 обозначены намагни- чивающая катушка 1, магнитное покрытие 2, индукционный датчик 3, механический привод 4 для жесткой связи намагничиваклцей катушки с индукционным датчиком и их вибрации.
Способ осуществляют следующим образом.
Неоднородное поле в направлении нормали к поверхности создают катупг- кой 1 (фиг. 1а). Распределение это- го поля в направлении X показано на фиг. 1Н (сплошная линия). Пунктиром на фиг. iS показано распределение тангенциальной (Х-й) компоненты поля катушки 1 , которую вблизи точки (, ) можно получить достаточно малой путем уменьшения размеров У( , У (фиг. 1а) или устранить введением симметрично расположенной относительно покрытия второй намагни- чивающей катушки. Намагничивающая катупка имеет прямоугольную форму витков обмотки, причем ее размер в направлении оси Z достаточно велик, поэтому Z-e компоненты намагничиваю- щего поля и поля покрытия в зоне испытуемого участка можно считать отсутствующими. С учетом изложенного, принимая во внимание потенциальный характер магнитного поля неоднородно- го намагниченного покрытия Н, из условия rot , получают
у ах
где Н,Н |Г- соответственно Х-я и У-я
компоненты поля покры Т7 тия и .
Интегрируя выргэжение (1) по толщине покрытия,, получают
H ;;(s/2)-H ;:-(-s/2)s|b, (2)
где F(W2) и п () - Х-я компонента ПОЛЯ покрытия соответственно на его верхней и нижней поверхностях;
т; fo
И ц - среднее по толщине значение
У-й компоненты поля покрытия внутри него (практически Н(У) - const).
Так как по условию перемаг ничива- ния намагниченность покрытия М имеет только. У-ю компоненту Мц, практически однородную по толщине, можно считать, что -1(/2)-н7(), тог- да
Ну (0/2)-rLv - -- ,
2 ЭХ
(3)
1
где Нл - тангенциальная компонента поля покрытия.
Поскольку область намагничивания вблизи , где неоднородностью на- магничиваюа1,его поля Н в направлении X можно пренебречь, всегда существенно больше толщины покрытия (менее 1 мкм), коэффициент размагничивания (Nq -Hij/Иу) в направлении оси У равен 1 и .
Тогда равенство (3) принимает вид
H ::(s/2)-&/2.11.
(4)
Далее, имея ввиду, что для поля покрытия над его поверхностью div B rUodiv , получают
3Hi .. ЭНх ЗУ Зх
(5)
Подставив (4) в (5), получают для величины 8Н,./ЗУ на поверхности покрытия ().
а 2
ан;;/у | .-а м /зх
(6)
Так как согласно предлагаемому способу исшятуемьй участок покрытия перемагничивается по предельному циклу магнитного гистерезиса, то зависимость Ми от напряженности на- магничивагацего поля Ни для всех точек участка остается одной и той же,
в противном случае отдельные точки испытуемого участка перемагничивают- ся по частным циклам магнитного гистерезиса с различными зависимостями ). Тогда справедливо следующее соотношение г
% 1 9н| ан| , . х аЦ зх л .
где ОС - дифференциальная восприимчивость покрытия; :в направлении У. Подставляя (7) в (6) и проводя
дифференцирование, получают
зн-з sL а н jaHifi s ,.
зГ - Ц я-Тх
в точке экстремума намагничивающего поля (,„(фиг. Ь) справедливо равенство ЭН,. и выражение
ан
9уравенство(8) дает
й1,1,
fH
(9)
Определенная таким образом величина Зн Г/Эу, представляющая величи- ну градиента поля покрытия на его поверхАости в точке экстремума на- магничивакщего поля (), непосредственно связана с толщиной покрытия, его магнитной характеристикой и со степенью неоднородности намагничивающего поля. Именно в указанную точку практически в окрестности зтой точки и располагают индукционный датчик, как показано на фиг. 1а. Величина магнитного потока, пронизывающего индукционный датчик, определяется выражением
ро(н 3+Ну) 5-п,(10)
где Ко - магнитная постоянная; S и п - средняя площадь витка и число витков индукционного датчика.
В выражении (Ю) суммарное поле предполагается постоянньм в пределах- сечения витков индукционного датчика в силу относительной малости размеров последнего.
При вибрации индукционного датчи- ка изменение координаты его расположения над покрытием определяется выражением uy(t) y-sinot, где йу и СО - соответственно амплитуда и частота вибрации. Изменение йУ во времени приводит к изменению поля покрытия в зоне расположения индукционного датчика и соответственно к появлению сигнала ЭДС в нем.
Поскольку вибрация создается при условии жесткой механической связи датчика и ис точника поля (их относительное перемещение равно нулю).изменения намагничивающего поля Н,. в зоне индукционного датчика не проис- Нц не оказывает вли- ЭДС индукционного датходит, так что яния на сигнал
чика. НГ от У
Учитывая зависимость величины в зоне расположе ния индук5
0
Н
i.r
ционного датчика в виде Нц(У)«: ---йУ,
получают для ЭДС индукционного датчика
/.ч л с ЭИя ) e(t)-jU,. ----m
ш.
ЬУ coscot
и для амплитуды ЭДС Е
-pi,Sn(0.
(11)
О
E,(U. S.n-0 3ЛУ.
(12)
Вблизи точки экстремума распределение Намагничивающего поля может быть представлено разложением в ряд по четным степеням X. Ограничиваясь первым членом разложения, можно записать (1-kx), где k - поЧстоянная.
ОУ зависящая
от геометрических размеров источника поля; Н, обозначено на фиг. 1&, это выражение в (12), получают
оу Подставляя
(9) и затем (9) в
°ч
(13)
S-n- Ь y-cO S-X,.
Амплитуду вибрации ЛУ изменяют обратно пропорционально напряженности намагничивающего поля по закону
(1А)
е П
макс
WHH U е
°а
максимальное значение напряженности намагничивающего поля;
йУ
миц амплитуда вибрации при
,к(,
При, этом йУ, соответствующие близким к О Н , не устанавливают, а соответствующие значения сигнала Ец получают nvTeM экстраполяции значеС р
НИИ при Ноц.:0 и Нд 0.
С учетом (14) выражение (13) дри- нимают вид
Ej,A
%
Г
(15)
где
.n.k.by,
Н
маис
со. (16)
5131
Таким образом, изменение амплитуды вибрации при изменении поля обеспечивает непосредственную пропорциональность амплитуды сигнала датчика толщине и дифференциальной восприимчивости самого покрытия.
Дифференциальная восприимчивость ТС ц покрытия в направлении нормали к его поверхности связана с восприимчивостью материала покрытия в этом направлении х выражением
,м
%
S Т+х
(17)
(в данном случае N,. 1).
Для материалов исследуемых покрытий максимальное значение -Х на предельном цикле магнитного гистерезиса существенно больше единицы, поэтому можно считать, что при значениях HOU , соответствующих максимальному %, Хц - 1 .
Тогда, снимая зависимость-амплитуды ЕU сигнала ЭДС индукционного датчика от поля , поступают для определения толщины покрытия
(18)
где Е -.максимальное значение ампли
туды ЭДС, индукционного дат
чика при изменении намагничивающего поля Н
01}
При этом дифференциальная восприимчивость %у при любом значении HOI определяется выражением
а
Еу/Е,у.
(19)
Равенства (18) и (19) определяют соответственно толщину и основные магнитные характеристики покрытия (в форме кривой зависимости дифференциальной восприимчивости от поля) в перпендикулярном направлении.
Для определения магнитных характеристик покрытия в его плоскости (например, в направлении X, фиг. 2) в зоне йс пытуемого -участка создают неоднородное тангенциальное намагничивающее поле HX с помощью намагничивающей катущки 1, фиг. 2а, Распределение Х-й и У-й компонент поля катушки показано на фиг. 25 (У-я компонента обозначена пунктиром). Как следует из фиг. 2, У-я компонента намагничивающего поля Н в области экстремума близка к нулю и при необходимости может быть получена равной
07626
нулю путем симметричного относительно плоскости покрытия расположения второй намагни 1ивающей катушки.
При условии достаточно больших размеров намагничивающей катушки в направлении оси Z из равенства divx получают
BI зв;
О зх ТУ
(20)
1 Интегрируя равенство (20) по толщине покрытия и учитывая при этом отсутствие У-й компоненты намагни- j ченности, получают
B J(S/2)-g/2 11 ,
(21)
где В|.(й/2) - нормальная компонента индукции покрытия на его порерунос т и; В j( . - индукция внутри покрытия (в| практически однородна по У в силу i относительно малой толщины покрытия). Из условия потенциальности поля
покрытия rot Н 0, получают
30
знГ
5у Зх
(22)
Дифференцируя(21) и подставляя в (22), получают
зн 1 авТ 1 8 9 в: 8,
35 У (о 2 ЭХ 2
fii,
Тх
(23)
Проводя далее операции, аналогич- 40 ные описанным вьщ1е (выражения (7)- (15)), получают
7С, i-- Е Ь„,,
X
(24)
где Ej( - амплитуда сигнала ЭДС индуК1 ;ионного датчика 3 (плоскость его витков перпендикулярна оси X) при его вибрации в направлении У совместно с источником намагничивающего поля.
При этом для справедливости (24) параметры вибрации и другие постоян- ные, входящие в коэффициент А, подбирают такими, чтобы этот коэффициент оставался неизменным при переходе к изменениям в плоскости покрытия.
713
Формула изобретения
Способ измерения параметров тонких магнитных покрытий, включагадий воздействие на образец постоянным магнитным полем и регистрац по полей, обусловленных намагниченностью образца покрытия, отличающий- с я тем, что, с целью расширения функциональных возможностей способа путем измерения толп1ины покрытия и измерения параметров образцов различных типоразмеров, магнитное покрытие намагничивают нормально его плоскости неоднородным в этой Плоскости полем, имеющим экстремум в зоне испытуемого участка, измеряют сигнал ЭДС, возникающий в индукционном датчике при вибрации жестко связанных между собой источника поля и индукционного датчика в направлении нормали к плоскости покрытия, при этом индукционный датчик располагают в точке экстремума намагничивающего поля, перемагничивают испытуемый участок по предельному цик28
лу магнитного гистерезиса изменением напряженности намагничивающего поля, одновременно изменяют амплитуду вибрации индукционного датчика
и источника намагничивающего поля обратно пропорционально величине напряженности намагничивающего поля, измеряют зависимость амплитуды сигнала индукционного датчика от напряженности намагничивающего поля, по этой зависимости определяют толщину магнитного покрытия и его магнитные характеристики в перпендикулярном направлении, затем намагничиваит покрытие тангентщально его поверхности полем, имеющим экстремум в зоне испытуемого участка, повторяют указанные операции до получения зависимости амплитуды сигнала
индукционного датчика от напряженности намагничивающего поля, по полученной зависимости и экстремальному значенио ранее измеренной зависимости определяют магнитные характеристики покрытия в произвольном направлении его плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1979 |
|
SU1019387A1 |
| Устройство для измерения магнитных характеристик магнитожестких покрытий | 1984 |
|
SU1204973A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2577083C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК | 1997 |
|
RU2125276C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ ФЕРРОМАГНИТНЫХ СТЕРЖНЕВЫХ ОБРАЗЦОВ | 1990 |
|
RU2024889C1 |
| ИНДУКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2600517C2 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ | 2014 |
|
RU2566418C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАЗРЫВОВ ТРОСОВ ТРОСОВОЙ ОСНОВЫ РЕЗИНОТРОСОВЫХ КОНВЕЙЕРНЫХ ЛЕНТ | 1991 |
|
RU2016404C1 |
| Способ повышения помехоустойчивости технологии локации муфтовых соединений обсадных колонн геологоразведочных скважин и устройство для его осуществления | 2022 |
|
RU2801354C1 |
| Устройство для измерения статических магнитных характеристик ферромагнитных материалов | 1982 |
|
SU1045181A1 |
Изобретение относится к области магнитных измерений. Цель - обеспечение возможности контроля свойств локальных участков покрытия (П) без нарушения его целостности, контроля толщины П и определения его характеристик в перпендикулярном направлении. Способ измерения параметров тонких магнитных П реализован в устройстве. Для достижения цели магнитное П намагничивают нормально его плоскости неоднородным в этой плоскости полем, измеряют электродвижущую силу в направлении нормали к плоскости П, перемагничивают испытуемый участок изменением напряженности намагничивающего поля (НИ), одновременно изменяют амплитуду вибрации индукционного датчика (ИД) и источника НИ, измеряют зависимость амплитуды сигнала от напряженности НП, по ней определяют толщину магнитного П и его магнитные характеристики в перпендикулярном направлении, намагничивают П тангенциально его поверхности полем, имеющим экстремум в зоне испытуемого участка, повторяют все операции до получения зависимости амплитуды сигнала ИД от напряженности НП и по ней и экстремальному значению ранее полученной зависимости определяют магнитные характеристи- ки П в произвольном направлении его плоскости. 2 ил. а S (Л
--Х
Составитель ВЛЧульгин Редактор А.Огар Техред А.Кравчук
Заказ 1887/42 Тираж 731 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,ул. Проектная, 4
Корректор Л.Патай
| Чечерников В.И | |||
| Магнитные измерения | |||
| МГУ, 1969, № 1, с | |||
| Экономайзер | 0 |
|
SU94A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Пркрытия магнито- твердые | |||
| Методы измерения магнитных параметров | |||
| Изд-во стандартов, 1976. | |||
