Изобретение относится к измерительной технике, а именно к технике неразрушающего контроля технического состояния резинотросовых конвейерных лент, и может быть использовано на всех горнодобывающих предприятиях, использующих конвейерный транспорт с тросовой основой.
Известен способ дефектоскопии металлических образцов с использованием вихретоковой составляющей вторичного поля, возбуждаемой первичными полями двух частот, причем таких, отношение которых не зависит от расстояния между источниками первичного поля и поверхностью образца, который можно использовать при контроле разрывов тросов. Дефект поверхности образца обнаруживается при последующем анализе частотных характеристик сигнала [1].
Недостатком способа является использование вихретоковой составляющей, малоэффективной при дефектоскопии тросов, свитых из тонких стальных проволок, что существенно препятствует развитию вихревых токов в материале тросов и приводит к малой контрастности отклика дефекта с фоновым сигналом бездефектной части тросов.
Известен способ контроля прочности изделия, армированного стальными тросами, заключающийся в продольном намагничивании троса, измерении вторичного поля тросов феррозондов преобразованием с выходом в блок обработки сигналов четных гармоник, предварительная подстройка которого производится посредством моделей образцовых дефектов. Оценка степени повреждений тросов производится на основании сравнения протяженности измеряемого и образцового сигналов, для чего в блок обработки вводят сигнал датчика скорости движения ленты [2].
Однако в известном способе не обеспечивается однозначное соответствие выходных сигналов дефектам массы тросового корда, поскольку никак не устраняются ложные сигналы четных гаpмоник при неконтролируемых деформациях тросов без нарушения их целостности (изгибы тросов внутри ленты, провисание и вибрация самой ленты и т.п.). Поэтому при любых изменениях расстояния между тросовым кордом и источником или приемником поля или тем и другим одновременно имеют место фиктивные отклики с амплитудно-частотно-фазовыми характеристиками, аналогичными характеристикам откликов истинных дефектов массы тросов.
Ближайшим по технической сущности к изобретению является способ обнаружения разрывов тросов тросовой основы резинотросовых конвейерных лент, заключающийся в подмагничивании тросов внешним источником магнитного поля, измерении амплитуды А продольной составляющей вторичного магнитного поля тросов и оценке характера дефектов по относительному изменению А/Ао ее величины, где Ао - номинальное значение образцового сигнала [3].
Недостатком известного способа является низкая надежность контроля из-за влияния на результаты контроля колебаний расстояния между тросовой основой и источником и/или приемником магнитных полей.
Цель достигается благодаря тому, что по способу обнаружения разрывов тросов тросовой основы резинотросовых конвейерных лент, заключающемуся в подмагничивании тросов внешним источником магнитного поля, измерении амплитуды А продольной составляющей вторичного магнитного поля тросов и оценке характера дефектов по относительному изменению А/Ао ее величины, где Ао - номинальное значение образцового сигнала, используют в качестве внешнего источника магнитного поля и приемника вторичного магнитного поля собственно генераторную катушку индуктивности и две встречно включенные соосно и симметрично расположенные относительно генераторной приемной катушки индуктивности, катушки устанавливают так, что их общая ось параллельная осям тросов и расположена от поверхности тросовой основы на расстоянии dо, выбранном из сообщения do = 4,6L/(Do/L + 3,35) (1), где L - расстояние между центром генераторной катушки и центрами приемных катушек; Do - номинальный диаметр тросов.
На фиг. 1 показана схема размещения зондового устройства у поверхности тросовой основы с указанием ее типовых дефектов и их откликов; на фиг.2 - схема замещения магнитного действия поверхностей тросовой основы эквивалентным действием отраженных источников; на фиг.3 - графики сигнала зондового устройства при переменном расстоянии от его оси до поверхности тросовой основы при параллельной ориентации оси зонда и тросов и при взаимно противоположных продольных перекосах резинотросовой ленты; на фиг.4 - графики аналоговых диаграмм сигнала зондового устройства в зоне разрыва троса при пяти различных линейных размерах разрыва; на фиг.5 - график экспериментальной зависимости отношения амплитуды сигнала зондового устройства в зоне разрыва троса к номинальному значению амплитуды сигнала при разрыве троса с нулевым линейным размером разрыва от линейных размеров разрыва; на фиг.6 - пример регистрации аналоговой диаграммы сигнала зондового устройства на резинотросовом конвейере.
Способ осуществляется следующим образом.
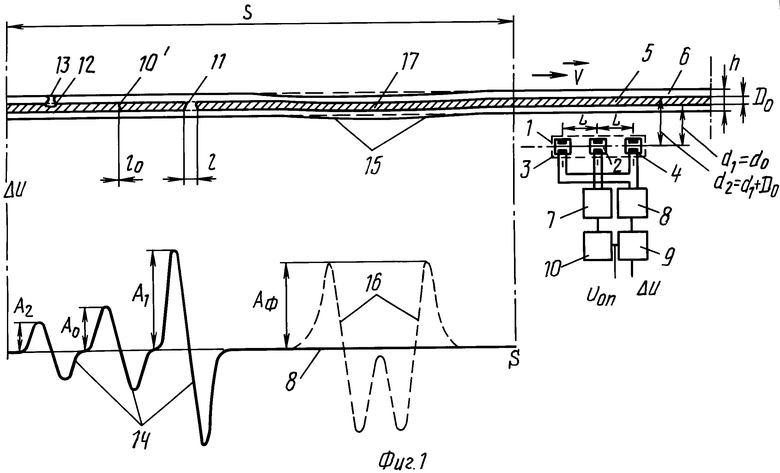
Индукционное зондовое устройство (зонд) 1, содержащее соосные генераторную катушку 2 и две встречно включенные приемные катушки 3 и 4, находящиеся на одинаковых расстояниях L от катушки 2, устанавливается на расстоянии d1 = do от нижней поверхности тросовой основы 5 конвейерной ленты 6 (фиг. 1). Магнитное поле катушки 2 намагничивает тросовую основу 5, вторичное поле которой индуцирует на катушках 3 и 4 одинаковые встречные напряжения, ортогональными векторными компонентами которого являются активная, пропорциональная электропроводности тросов, и реактивная, пропорциональная их магнитной проницаемости, составляющие. Реактивная составляющая суммарного вторичного напряжения катушек 3 и 4 измеряется по известной структурной схеме, в состав которой входит генератор 7 переменного тока, питающий катушку 2, усилитель 8 вторичного напряжения катушек 3 и 4 и синхронный детектор 9, коммутируемый через фазовращатель 10 опорным напряжением Uоп, отбираемым от генератора 7 в фазе с реактивной составляющей Δ U суммарного напряжения на катушках 3 и 4. Активная (вихретоковая) составляющая этого напряжения блокируется детектором 9 и отсутствует на его выходе. Поскольку реактивная составляющая вторичного напряжения на зажимах каждой из катушек 3 и 4 пропорциональна одному и тому же значению магнитной восприимчивости тросовой основы 5 в ее номинальном состоянии, напряжение сигнала Δ U имеет нулевое значение при любом расстоянии между тросовой основой 5 и зондом 1, однако при условии параллельности осей троса и зонда. Таким образом, дифференциальное включение катушек 3 и 4 обеспечивает получение нулевого фона сигнала Δ U при отсутствии в тросовой основе 5 магнитных неоднородностей. Применение дифференциального датчика, устанавливаемого на произвольном расстоянии от поверхности потока дробленой руды, обеспечивает получение фонового сигнала от однородной по составу рудной мелочи.
Установка зонда 1 на расстояние do обеспечивает однозначное обнаружение разрывов тросов (дефектов массы) и устраняет регистрацию ложных откликов, обусловленных продольными перекосами тросовой основы. При установке зонда 1 на расстояние, большее или меньшее do, ложные отклики не отличаются от откликов, обусловленных дефектами массы тросов. Указанные на фиг.1 типовые дефекты единичного троса, диагностируемого зондом 1 при движении конвейерной ленты 6 (направление движения указано вектором  ), представлены разрывом 10' троса без потери сплошности, разрывом 11 с потерей сплошности (длина разрыва l) и дефектом 12 массы троса в зоне коррозии из-за порыва 13 резинового покрытия ленты 6. Схематическое изображение диаграммы сигнала Δ U на пути S перемещения ленты 6 представлено графиком 14. независимо от вида дефектов отклик каждого из них проявляется в виде положительного и отрицательного пиков сигнала Δ U с амплитудами Ао, А1, А2, когда соответствующий дефект проходит над промежутком катушек 2, 3 и 2, 4.
), представлены разрывом 10' троса без потери сплошности, разрывом 11 с потерей сплошности (длина разрыва l) и дефектом 12 массы троса в зоне коррозии из-за порыва 13 резинового покрытия ленты 6. Схематическое изображение диаграммы сигнала Δ U на пути S перемещения ленты 6 представлено графиком 14. независимо от вида дефектов отклик каждого из них проявляется в виде положительного и отрицательного пиков сигнала Δ U с амплитудами Ао, А1, А2, когда соответствующий дефект проходит над промежутком катушек 2, 3 и 2, 4.
При расстоянии do установки зонда 1 сигнал Δ U имеет нулевой уровень и тогда, когда над зондом 1 проходит участок 15 с провисанием тросовой основы 5, причиной которого может являться либо заводской дефект ленты 6, либо ее собственное провисание при вертикальных колебаниях ленточного тракта. Однако участок 15 ленты 6 создает фиктивные отклики 16 с амплитудой Аф, если ось зонда 1 значительно установлена на расстоянии, меньшем или большем расстояния do, определяемого формулой (1), причем амплитуда ложного отклика даже при незначительном продольном перекосе ленты 6 может существенно превышать отклик истинного дефекта.
Ниже приводится аналитическое обоснование формулы (1).
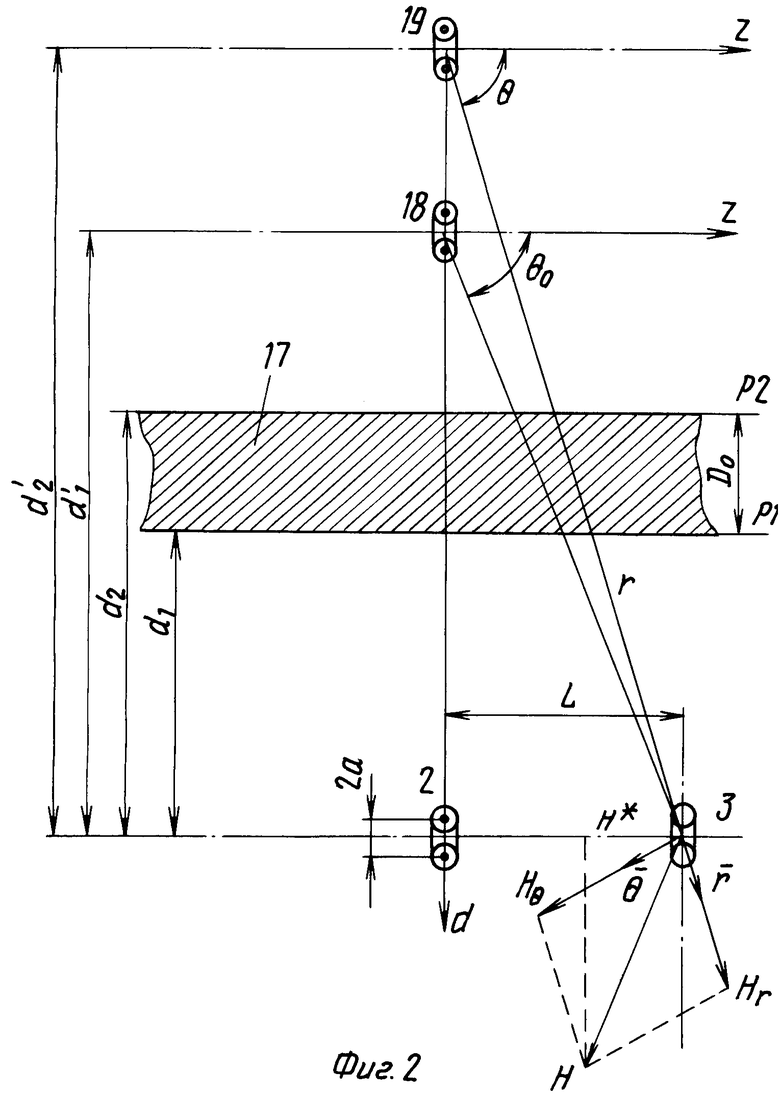
Выделяя из зонда 1 одинаковые двухкатушечные системы 2,3 и 2,4' рассматривают каждую из них как элементарный индукционный зонд, удовлетворяющий условию дипольного приближения катушек. Располагают ось зонда с катушками 2 и 3 (фиг.2) на расстоянии d1 от поверхности плоского магнитного полупространства Р1, совпадающей с нижней поверхностью тросового слоя 17, и на расстоянии d2, когда то же полупространство занимает положение Р2, совпадающее с верхней поверхностью тросового слоя 17. Тогда номинальный диаметр тросов может быть определен как разность расстояний d2 и d1:
Do = d2 - d1 (2)
Магнитное действие тросового слоя 17, намагничиваемого полем генераторной катушки 2, можно представить как разность действий на катушку 3 вторичных полей (откликов) поверхностей полупространств Р1 и Р2. ЭДС сигнала зонда, индуцированная вторичным полем объекта, выражается универсальной формулой
E = Eo ˙ G(d/L)x1, (3) где Ео - сигнал первичного поля зонда в немагнитной среде;
G(d/L) - геометрический фактор зонда, являющийся функцией отношения расстояния d до объекта к длине зонда L;
х1 - кажущаяся магнитная восприимчивость объекта.
Для плоского магнитного полупространства, как показано ниже, при d/L = 1 функция G(d/L) имеет максимум, в области которого существует зона нечувствительности зонда к изменению расстояния d.
Применительно к геометрии измерений, указанной на фиг.2, получают
Е1 = Еo ˙ G(d1/L) ˙ x1 (4) для полупространства Р1 и
Е2 = Ео ˙G(d2/L) х1 для полупространства Р2 или с учетом выражения (2)
Е2 = Ео ˙ G[(d1 + Do)/L]. (5)
Тогда сигнал действия тросового слоя 17 определен выражением
Δ E = E1 - E2 = Eo(G(d1/L)-G[(d1+Do)/L]x1, (6) при этом результирующий геометрический фактор зонда 1
Δ G = G(d1/L) - G[(d1 + Do)/L]. (7)
Из формулы (7) следует, что результирующий геометрический фактор зонда при действии тросового слоя зависит от номинального диаметра тросов Do. Формула (1) и представляет то значение d1 = do, при котором для номинального диаметра тросов данного типа резинотросовых ленты выполняется условие максимума результирующего геометрического фактора как условие получения максимальной чувствительности зонда 1 и устранения фиктивных откликов, обусловленных продольным перекосом тросов. Практически значимость формулы (1) подчеркивается той особенностью зонда 1 (фиг.1), что при любом расстоянии его установки от тросовой основы 5 сигнал Δ U имеет всегда нулевое значение.
Для нахождения максимума Δ G-фактора пользуются эквивалентной заменой поверхностей Р1 и Р2 тросового слоя 17 (фиг.2) отраженными источниками 18 и 19 путем зеркального отображения генераторной катушки 2 в плоскостях Р1 и Р2, при этом источник 18 находится на расстоянии d11 = 2d1 от оси зонда, а источник 19 - на расстоянии d21 = 2d2.
При эквивалентной замене плоского полупространства отраженным источником сигнал Е зонда, определяемый формулой (3), может быть выражен также формулой
Е = -0,5х1 ˙ Е*, (8) где Е* - сигнал приемной катушки 3, индуцируемый полем отраженного источника.
Из формул (3) и (8) получают
G(d/L) = - 0,5 ˙ E*/Eо или, учитывая пропорциональность сигналов Е* и Еo индуцирующим их полям Н* и Но (фиг.2),
G(d/L) = -0,5 ˙ H*/Ho. (9)
При дипольном приближении катушек 2 и 3 (что выполняется на практике как необходимое условие получения максимума геометрического фактора зондов) напряженность поля в центре катушки 3 может быть определена на основании известной формулы =(ia2/4Πr3)(
=(ia2/4Πr3)( 2cosθ+
2cosθ+  sinθ), (10) где i - ток, обтекающий виток радиуса а;
sinθ), (10) где i - ток, обтекающий виток радиуса а;
r, θ - сферические координаты центра приемного витка; ,
,  - радиальный и полярный единичные векторы, из которой, положив θ = 0, получают выражение первичного поля зонда:
- радиальный и полярный единичные векторы, из которой, положив θ = 0, получают выражение первичного поля зонда: =ia2/2ΠL3. (11)
=ia2/2ΠL3. (11)
Поле Н*, представляющее осевую составляющую напряженности поля отраженного диполя, в центре витка катушки 3 определяют выражением:
H* = (ia2/4 π r3) (2cos2 θ - sin2 θ). (12)
Тогда согласно формуле (9)
G(d/L) = -(L3/4r3)(2cos2 θ - sin2 θ). (13)
Произведя в выражении (13) замену
L/r = cosθ, получают
G(d/L) = -0,25(2cos5 θ - cos3 θ ˙ sin2 θ). (14)
Дифференцируя далее выражение (14) и приравнивая нулю его первую производную
dG(d/L)/d θ = 3cos2 θ ˙ sin θ (sin2 θ -
- 4cos2 θ) = 0, получают решение, являющееся условием максимума геометрического фактора G(d/L), при действии бесконечного полупространства, сплошь заполненного тросовыми слоями:
tgθo= 2 (θo≃ 63°30′), что, как видно из фиг.2, имеет место при наличии равенства
d = do = L, т.е. при
do/L = 1. (15)
Полученный результат нельзя использовать для тросового слоя, поскольку при установке зонда 1 (фиг.1) по условию (15) результирующий Δ G-фактор каждой из пар 2,3 и 2,4 не имеет максимума.
Расчетную формулу для функции G(d/L) получают после следующего преобразования формулы (13):
G(d/L) = -(L3/4r3)(2cos2 θ - sin2 θ ) =
=- 0,25cos3 θ (3cos2 θ -1) с заменой
cos θ = 1/(1+tg2 θ )1/2 = 1/2 [d/L)2 +
+0,25]1/2, после чего получают
G(d/L) = [(d/L)2 - 0,5]/32[(d/L)2 + 0,25]35. (16)
На основании формулы (16) выражения для геометрических факторов G(d1/L), G(d2/L) имеют вид
G(d1/L) = [(d1/L)2 - 0,5]/32[(d/L)2 +
+0,25]2,5; (17)
G(d2/L) = {[(d1 + Do)/L]2 - 0,5}/32{[(d1 +
+Do)/L]2 + 0,25}2,5, (18) причем результирующий Δ G-фактор определяется формулой (7) как разность G(d1/L) и G(d2/L). Из формул (17) и (18) видно, что положение максимума функции Δ G определяется исключительно отношением Do/L. Задача нахождения максимума ΔG-фактора не может быть решена аналитически ввиду высоких степеней отношения d1,2/L. Поэтому ее решение получено методом последовательных приближений с использованием вычислительной техники в виде формулы (1)
do= 
Формула (1) является универсальной и может быть использована при диагностике любых типоразмеров резинотросовых лент с любым индукционным зондом 1 (фиг.1), удовлетворяющим условию дипольного приближения.
Аналитически точно критерию выбора длины зонда L не существует, поэтому значение L при осуществлении заявленного способа по рассмотренному отличительному признаку выбирается по условию
3h > L > 2h, (19) где h - толщина конвейерной ленты. Условие (19) обосновано тем, что при выборе L < 2h существует опасность повреждения зонда отслаивающимися частями резинового покрытия ленты, а при L > 3h быстро уменьшается чувствительность зонда к дефектам масс тросов. Точно также опытным путем установлено, что дипольное приближение катушек зонда, являющееся необходимым условием получения максимума ΔG-фактора, достигается при выборе осевого размера катушек зонда (длина катушки), не превышающего одной третий длины зонда L. В сторону уменьшения размеров катушек ограничений не существует.
Ориентация оси зонда 1 (фиг.1, фиг.2) вдоль тросов обеспечивает их эффективное намагничивание полем катушки 2, имеющим значительную тангенциальную составляющую. При ориентации оси зонда поперек тросов их размагничивающий фактор резко увеличивается, соответственно падает и чувствительность зонда к дефектам массы троса, которая вместе с тем повышается к действию магнитных неоднородностей, обусловленных незначительными изгибами тросов, перекосами тросовой основы при колебаниях ленты и т.п.
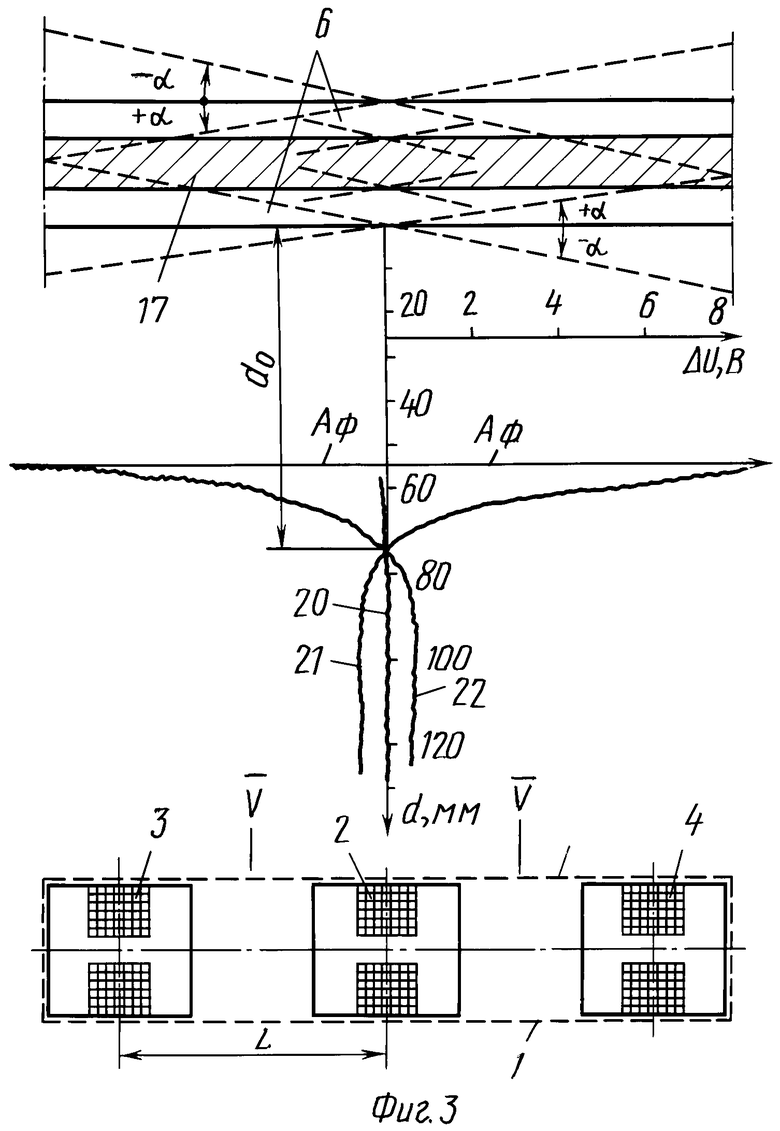
Экспериментальное подтверждение эффективности заявленного способа по отличительному признаку, касающемуся установки зонда 1 на расстояние do, определяемое формулой (1), приведено на фиг.3 Графики 20, 21 и 22 представляют зарегистрированные самописцем сигналы Δ U зонда 1 при его непрерывном перемещении по оси d в направлении (указано векторами  ) к тросовой основе 5 при тех различных положениях ленты 6 - горизонтальном ( α = 0), график 20, и со встречными продольными перекосами под малыми углами +α (график 21) и -α (график 22), причем α = 10о. В эксперименте использован зонд 1 длиной L = 62 мм, изображенный на фиг.3 в натуральную величину. Лента 6 представлена образцом резинотросовой ленты с номинальным диаметром тросов Dо = 11 мм. Для указанных исходных данных на основании формулы (1) расчетное значение do равно 74,88 мм:
) к тросовой основе 5 при тех различных положениях ленты 6 - горизонтальном ( α = 0), график 20, и со встречными продольными перекосами под малыми углами +α (график 21) и -α (график 22), причем α = 10о. В эксперименте использован зонд 1 длиной L = 62 мм, изображенный на фиг.3 в натуральную величину. Лента 6 представлена образцом резинотросовой ленты с номинальным диаметром тросов Dо = 11 мм. Для указанных исходных данных на основании формулы (1) расчетное значение do равно 74,88 мм:
do=  =
=  = 74,88.
= 74,88.
Из фиг. 3 видно, что график 20 при α = 0 представляет нулевой уровень сигнала при всех значениях расстояния d, тогда как при перекосах ленты под углами +α и -α (графики 21 и 22) сигнал Δ U непрерывно изменяется со сменой знака в точке do = 75,8 мм, практически совпадающей с расчетным значением dо, где все три графика пересекаются и имеют нулевое значение сигнала Δ U. Таким образом, при установке зонда 1 на расчетное расстояние в составе информативного сигнала зонда отсутствуют фиктивные отклики при перекосах конвейерной ленты или изгибах тросов, т.е., в целом при неконтролируемом изменении расстояния между приемными катушками зонда и поверхностью тросовой ленты. При установке зонда на любом другом расстоянии от поверхности тросовой основы, особенно расстоянии, меньшем do, амплитуда Аф фиктивного отклика, как это видно из фиг.3, может достигать предельных отметок шкалы регистратора и превышать отклики истинных дефектов масс диагностируемого троса.
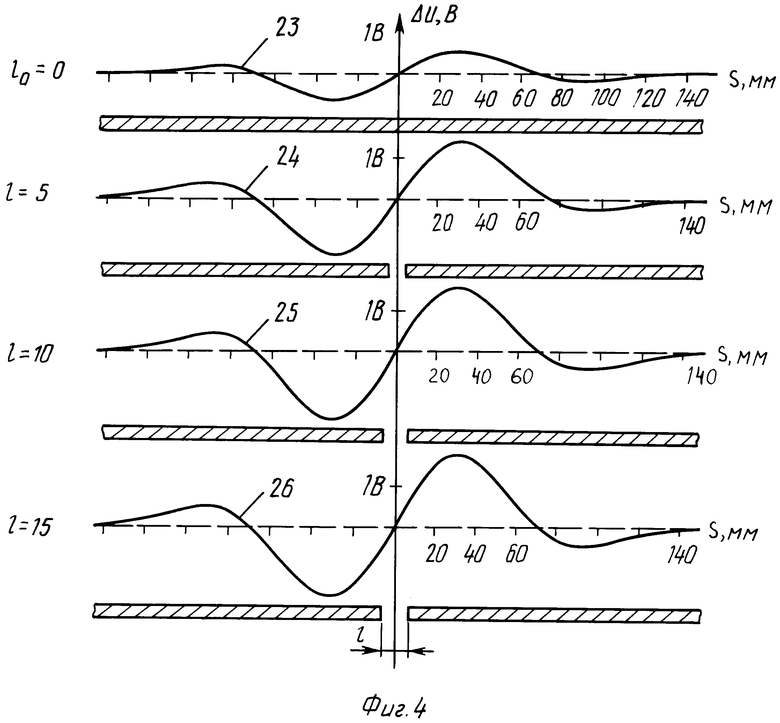
Аналоговые диаграммы сигнала Δ U в зоне разрыва единичного троса приведены на фиг.4, где график 23 соответствует полному поперечному рассечению троса без потери контакта (l = 0, дефект 10' на фиг.1), а графики 24, 25 и 26 соответствуют полному разрыву с потерей сплошности троса (дефект 12 на фиг. 1),причем линейные размеры разрыва l составляют соответственно 0,5, 10 и 15 мм. В эксперименте использован зонд 1, конструкция которого указана на фиг. 3, при этом масштаб графиков 24, 25 и 26 по оси Δ U одинаков с масштабом графиков 21, 22 и 20 на фиг.3. Графики 24, 25 и 26 на фиг.4 зарегистрированы при перемещении ленты вдоль оси зонда, установленного на расстоянии do = 75,8 мм от нижней поверхности тросовой основы. Аналоговые диаграммы сигнала Δ U на фиг.4 характеризуются наличием разнополярных амплитуд сигнала Δ U, регистрируемых в моменты перемещения дефекта над серединой промежутка пар катушек 2,3 и 2,4. По мере увеличения линейных размеров l разрыва троса амплитуда сигнала закономерно возрастает.
На графике 27 (фиг.5) представлена экспериментальная зависимость l = l(A/Ao) линейных размеров разрыва l по отношению амплитуды А сигнала Δ U для разрывов троса с потерей контакта в месте дефекта к амплитуде Аоотклика образцового разрыва троса с нулевым линейным размером. Экспериментальная зависимость l = l(A/Ao) в форме графика 27 может быть непосредственно использована для определения линейных размеров разрыва троса по измеренным значениям амплитуд сигнала ΔU, при этом номинальное значение амплитуды А должно быть заранее определено экспериментальным путем, например, по аналоговой диаграмме сигнала Δ U (график 23 фиг.4). Экспериментальная зависимость l = l(A/Ao) может быть также аппроксимирована математической формулой. В частности, график 27 с достаточной для практики точностью описывается выражением
l = [(A/Ao - 1)/a]1/b, где коэффициенты аппроксимации а и b имеют численные значения, соответственно а = 0,82896, b = 0,36848.
Аналоговая диаграмма 28 сигнала Δ U на фиг.6 зарегистрирована на резинотросовом конвейере П2-2 Стойленского ГОКа и представляет фрагмент материалов испытаний устройства для осуществления заявленного способа. Отклики 29, 30 и 31 обусловлены тремя разрывами троса с нулевыми линейными размерами, а четыре пика в пределах отклика 32 соответствуют четырем технологическим зазорам 20 мм между концами встречных тросов в интервале стыка ленты. Проверка надежности обнаружения дефектов производилась путем визуального контроля с фотографированием состояния тросов после вскрытия резинового покрытия диагностированного участка ленты после его замены. Проверкой установлено полное отсутствие фиктивных откликов при диагностике ленточного тракта длиной около 2 км и однозначное соответствие зарегистрированных откликов истинным дефектам массы тросов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННОЕ ЗОНДОВОЕ УСТРОЙСТВО | 1997 |
|
RU2165091C2 |
| Способ контроля скорости спеканияжЕлЕзОРудНОй шиХТы B АглОМЕРАТ | 1978 |
|
SU830231A1 |
| СИСТЕМА И СПОСОБ СКАНИРОВАНИЯ СОСТОЯНИЯ ТРОСОВОЙ ТРАНСПОРТЕРНОЙ ЛЕНТЫ ЛЕНТОЧНОГО КОНВЕЙЕРА | 2023 |
|
RU2803670C1 |
| Устройство контроля целостности ленты конвейера для доставки ферромагнитных материалов | 1986 |
|
SU1558814A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЛИННОМЕРНОГО РЕЗИНОТРОСОВОГО ИЗДЕЛИЯ ДЛЯ ГОРНОШАХТНОГО ОБОРУДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2247803C2 |
| Индукционный датчик | 1979 |
|
SU1019387A1 |
| ОПРЕДЕЛЕНИЕ ПРОФИЛЯ ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2299399C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛИЧЕСКИХ АРМИРУЮЩИХ ЭЛЕМЕНТОВ В РЕЗИНОТРОСОВЫХ ЛЕНТАХ | 2023 |
|
RU2816247C1 |
| ИЗМЕРЕНИЕ ТОЛЩИНЫ СТЕНКИ ЭЛЕКТРИЧЕСКИ ПРОВОДЯЩЕГО ОБЪЕКТА | 2001 |
|
RU2260172C2 |
| СПОСОБ КОНТРОЛЯ ОБЪЕКТА ИЗ ЭЛЕКТРИЧЕСКИ ПРОВОДЯЩЕГО МАТЕРИАЛА | 2001 |
|
RU2283488C2 |
Изобретение относится к измерительной технике, а именно к неразрушающему контролю состояния тросов тросовой основы резинотросовых конвейерных лент. Цель изобретения - повышение надежности путем уменьшения влияния колебаний расстояния между тросовой основой и/или приемником магнитных полей достигается благодаря использованию реактивной составляющей суммарного сигнала встречно включенных катушек индукционного зонда, устанавливаемого его осью на оптимальном расстоянии от поверхности тросовой основы, определяемой формулой do=4.26×L/(Do/L+3.35) где L - длина зонда; Do - номинальный диаметр тросов. По значению l, определяемому по экспериментальной зависимости l=l(A/Ao) , где A - измеряемое амплитудное значение сигнала в зоне разрыва диагностируемого троса; Ao - номинальное амплитудное значение сигнала при разрыве троса с нулевым линейным размером разрыва, судят о наличии и линейных размерах разрыва троса. 6 ил.
СПОСОБ ОБНАРУЖЕНИЯ РАЗРЫВОВ ТРОСОВ ТРОСОВОЙ ОСНОВЫ РЕЗИНОТРОСОВЫХ КОНВЕЙЕРНЫХ ЛЕНТ, заключающийся в подмагничивании тросов внешним источником магнитного поля, измерении амплитуды A продольной составляющей вторичного магнитного поля тросов и оценке характера дефектов по относительному изменению A / A0 ее величины, где A0 - номинальное значение образцового сигнала, отличающийся тем, что, с целью повышения надежности путем уменьшения влияния колебаний расстояния между тросовой основой и источником и/или приемником магнитных полей, используют в качестве внешнего источника магнитного поля и приемника вторичного магнитного поля собственно генераторную катушку индуктивности и две встречно включенные соосно и симметрично расположенные относительно генераторной приемные катушки индуктивности, катушки устанавливают так, что их общая ось параллельна осям тросов и расположена от поверхности тросовой основы на расстоянии d0, выбранном из соотношения
d0 = 4,26L / (D0/L + 3,35),
где L - расстояние между центром генераторной катушки и центрами приемных катушек;
D0 - номинальный диаметр тросов.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ контроля прочности армированных тросами изделий | 1981 |
|
SU1164592A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
