Изобретение относится к грузоподъемным устройствам.
Цель изобретения - повышение эксплуатационных характеристик путем улучшения распределения силовой на- грузки на привод подъемника.
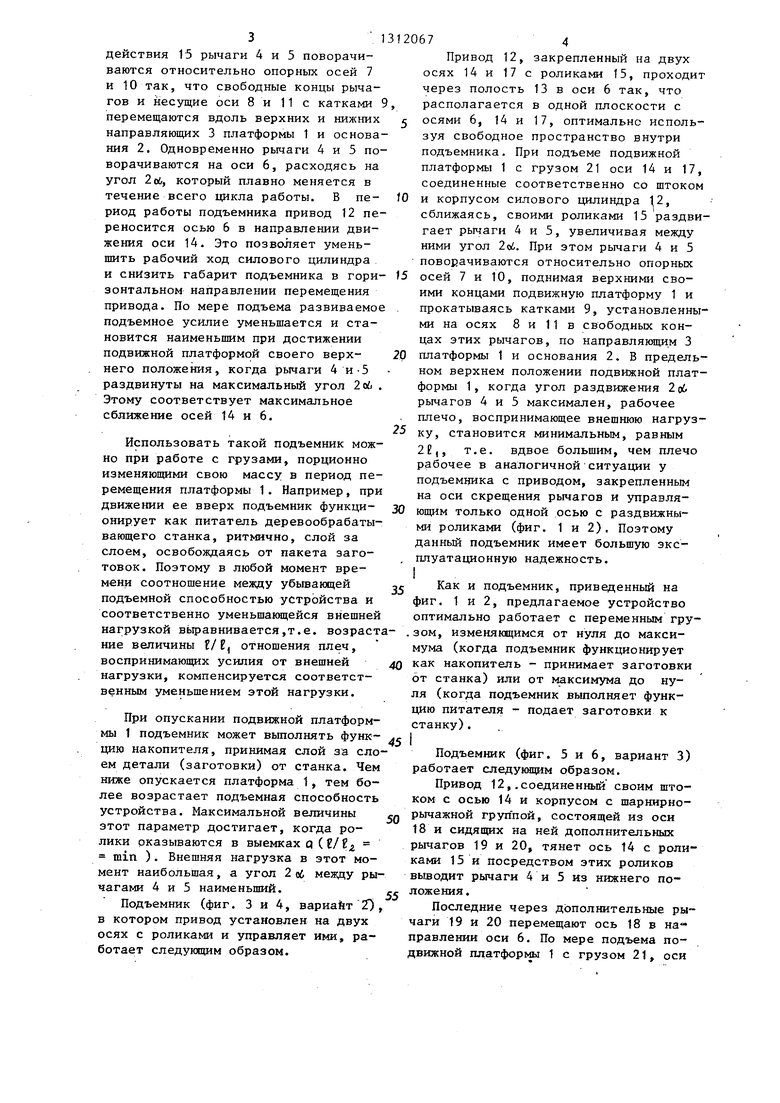
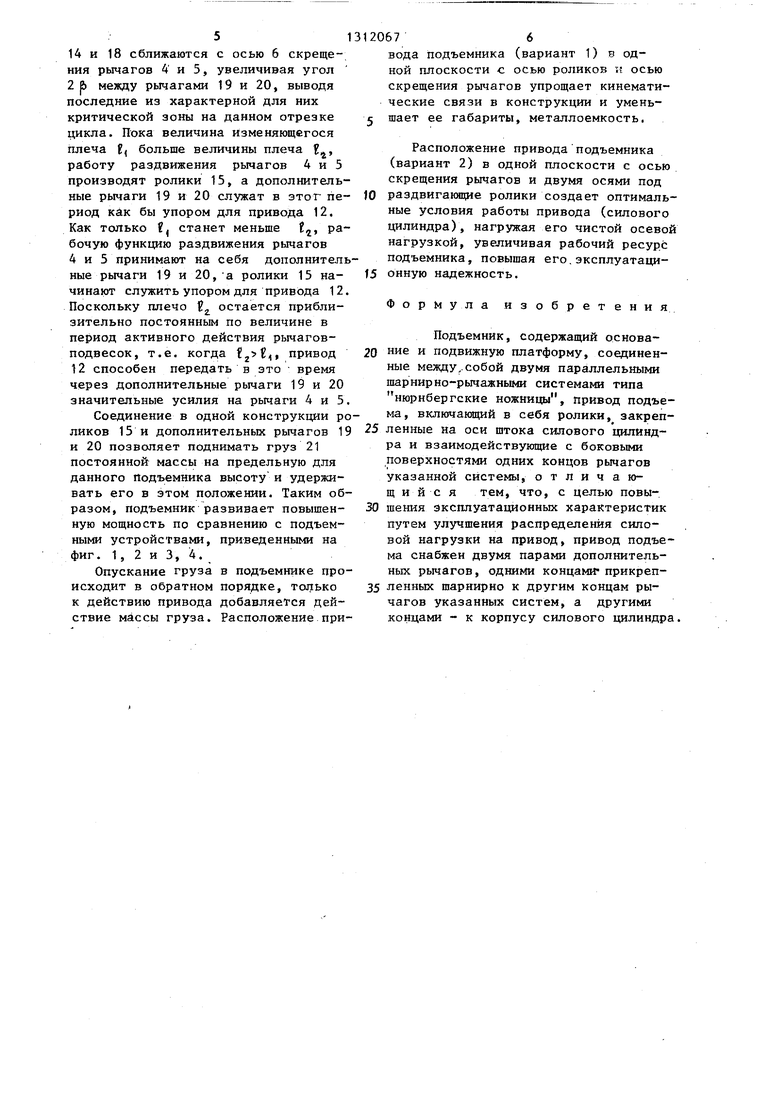
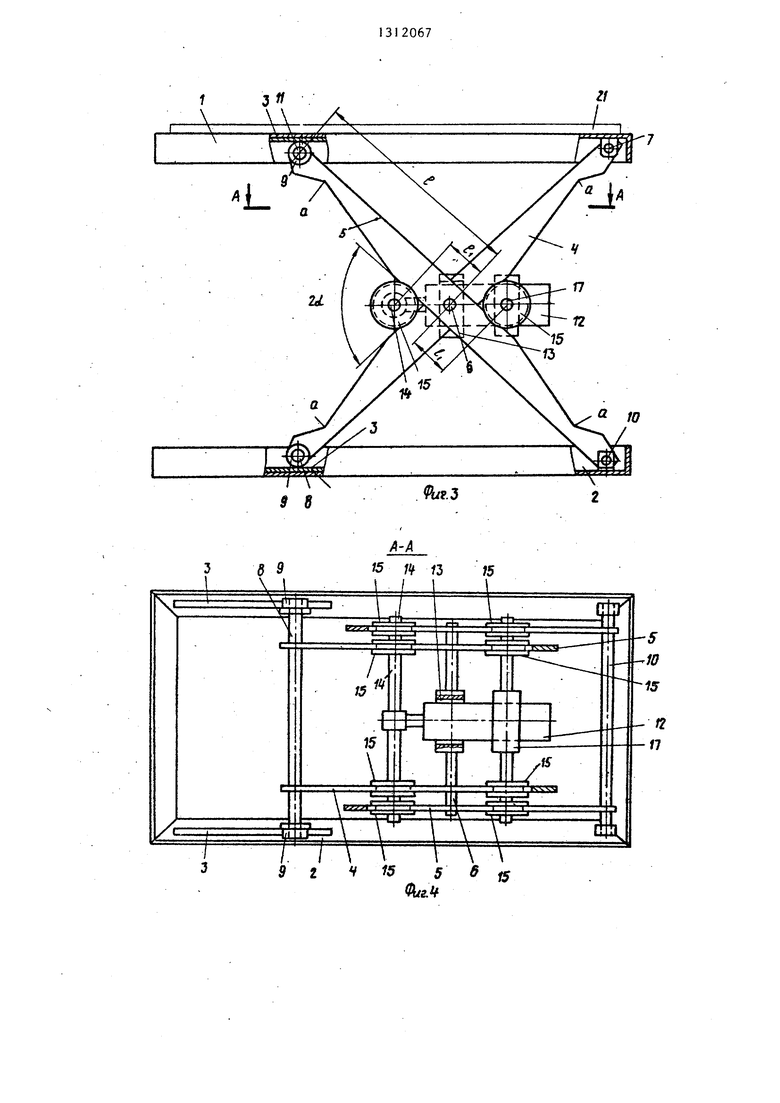
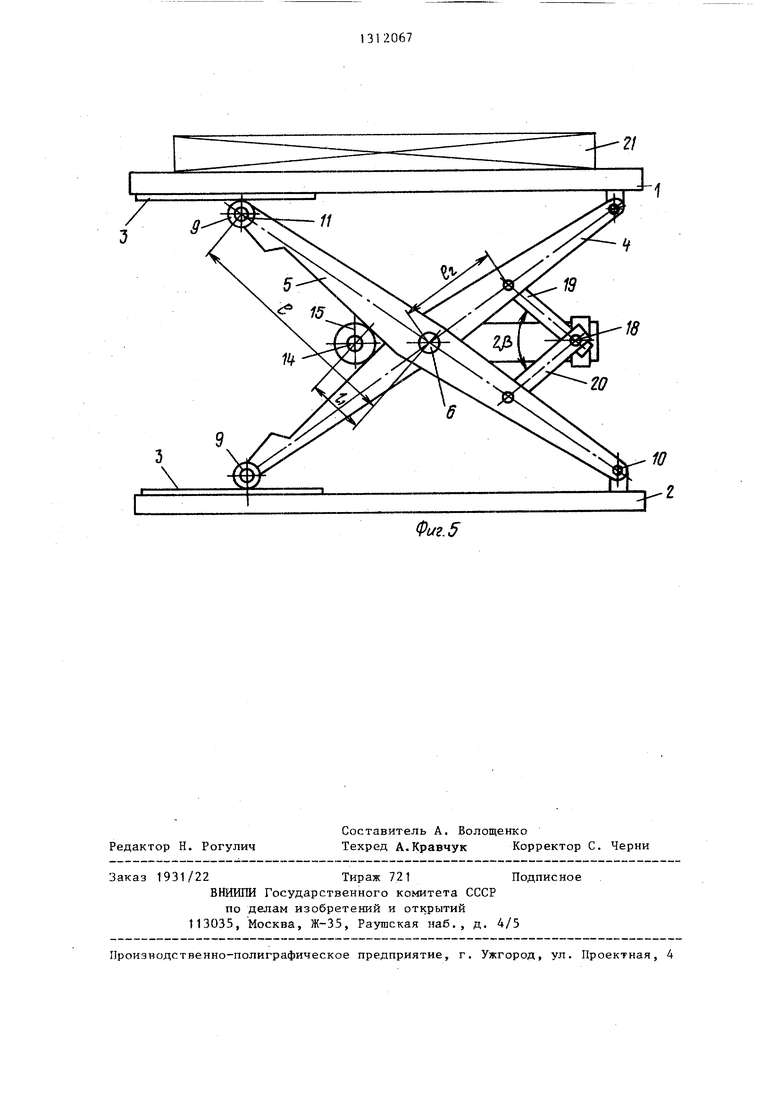
На фиг. 1 показан подъемник в аксонометрии, общий вид; на фиг.2 то же, вариант 1; на фиг. 3 - то же, вариант 2; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - подъемник, общий вид., вариант 3; на фиг. 6 - то же, вид сверху
Подъемник (фиг.1 и 2) содержит подвижную платформу 1 и основание 2 с парами направлянзщих 3 на каждой из них. Основание и платформа связаны между собой механизмом вертикального перемещения, состоящего из рычагов 4 и 5, попарно скрещенных и шарнирно сидящих на общей оси 6 по принципу нюрнбергских ножниц. Рычаги 4 верхними концами шарнирно соединены с подвижной платформой посредством осе 7. Нижние концы рычагов 4 соединены осью 8, на концах которой размещены два катка 9, опираю1Щ1еся на направ- ляющи.е 3 основания 2. Рычаги 5 нижними концами шарнирно соединены с основанием 2 при помощи осей 10, а в верхних их концах закреплена .ось 11, на которой установлены два катка 9, имеющие возможность перемещаться по направляющим 3...
Привод (силовой гсилиндр) 12 за- креплен своим корпусом в кольцевой полости .,- 13 оси 6, а штоком соединен с осью 14, несущей раздвигающие ролики 15, гайкой 16.
Рычаги 4 и 5 имеют выемки а для роликов 15.
Подъемник (фиг, 3-4) содержит подвижную платформу 1 и основание 2 с парами направляняцих 3 на каждой из них.
Основание и платформа связаны между собой механизмом вертикального перемещения, состоящего из рычагов 4 и 5, попарно скрещенных и сидящих на общей оси 6 по принципу нюрнбергских ножниц.
Рычаги 4 верхними концами шарнирно соединены с грузонесущей платформой посредством осей 7. Нижние кон- цы рычагов 4 соединены между собой осью 8, на которой размещены два катка 9 опиракициеся на направляющие 3 основания 2. Рычаги 5 нижними конца
5
0
-
г
5
ми шарнирно соединены с основанием 2 при помощи осей 10, а в верхних их концах закреплена ось 11, на которой установены два катка 9, имекяцие возможность перемещаться по направляющим 3 подвижной платформы 1.
Привод (силовой цилиндр) 12 закреплен на осях 14 и 17.
Ось 6 в средней своей части имеет кольцевую полость 13, через которую с зазором проходит привод (силовой цилиндр) 12.
Таким образом, оси 14 и 17 оказываются расположенными в одной плоскости, с осью привода (силового цилиндра) и осью скрещения рычагов 4 и 5. На осях 14 и 17 находятся раздвигающие ролики 15.
Подъемник (фиг. 5 и 6) содержит подвижную платформу 1 и основание 2 с парами Д1аправляющих 3 на каждой из них. Основание и платформа связаны между собой механизмом вертикального перемещения, состоящего из рычагов 4 и 5, попарно скрещенных и сидящих на общей оси 6 по принципу нюрнбергских ножниц. Рычаги 4 верхними концами щарнирно соединены с грузонесущей платформой посредством осей 7. Низкние концы рычагов 4 соединены между собой осью 8, на которой размещены два катка 9, опирающиеся на направляющие 3 основания 2. Рычаги 5 -нижними концами шарнирно соединены с основанием 2 при помощи осей 10, а в верхних их концах закреп- лена ось 11, на которой установлены два катка 9, имеющие возможность перемещаться по направляющим 3 подвижной платформы 1. Привод 12 закреплен- на оси 14 с роликами 15 и на оси 18, шарнирно-подвешенной к скрещенным рычагам 4 и 5 на дополнительных рычагах 19 и 20, образующих с осью 18 шарнирно-рычажную группу.
1
Привод 12 проходит с зазором через кольцевую полость 13 в оси 6.
Подъемник (фиг. 1 и 2, вариант 1), в котором привод установлен на оси скрещения рычагов и оси с роликами и управляет этой осью, работает следующим образом.
В процессе работы привод 12, упираясь своим корпусом в ось 6, в которой он затфеплен, передает через шток, соединенный с осью 14, тянущее усилие, принуждая ролики 15 этой оси прокатываться по рычагам 4 и 5. От
действия 15 рычаги 4 и 5 поворачиваются относительно опорных осей 7 и 10 так, что свободные концы рычагов и несущие оси 8 и 11 с катками 9 перемещаются вдоль верхних и нихсних направляющих 3 платформы 1 и основания 2. Одновременно рычаги А и 5 поворачиваются на оси 6, расходясь на угол 2об, который плавно меняется в течение всего цикла работы. В пе- риод работы подъемника привод 12 переносится осью 6 в направлении движения оси 14. Это позволяет уменьшить рабочий ход силового цилиндра и снизить габарит подъемника в гори- зонтальном направлении перемещения привода. По мере подъема развиваемое подъемное усилие уменьшается и становится наименьшим при достижении подвижной платформой своего верх- него положения, когда рычаги 4 и-5 раздвинуты на максимальный угол 2 об . Этому соответствует максимальное сближение осей 14 и 6.
Использовать такой подъемник можно при работе с грузами, порционно изменяюпщми свою массу в период перемещения платформы 1. Например, при движении ее вверх подъемник функци- онирует как питатель деревообрабатывающего станка, ритмично, слой за слоем, освобождаясь от пакета заготовок. Поэтому в любой момент времени соотношение между убывающей подъемной способностью устройства и соответственно уменьшающейся внешней нагрузкой вь1равнивается,т.е, возрастние величины /Е, отношения плеч, воспринимающих усилия от внешней нагрузки, компенсируется соответственным уменьшением этой нагрузки.
При опускании подвижной платформ- мы 1 подъемник может выполнять функ- цию накопителя, принимая слой за слоем детали (заготовки) от станка. Чем ниже опускается платформа 1, тем более возрастает подъемная способность устройства. Максимальной величины этот параметр достигает, когда ролики оказываются в выемках q(f/f min ). Внешняя нагрузка в этот момент наибольшая, а угол 2 об между рычагами 4 и 5 наименьший.
Подъемник (фиг. 3 и 4, вариайт , в котором привод установлен на двух осях с роликами и управляет ими, работает следующим образом.
10 15 . 20
25
зо 35
40
0
5
Привод 12, закрепленный на двух осях 14 и 17с роликами 15, проходит через полость 13 в оси 6 так, что располагается в одной плоскости с осями 6, 14 и 17, оптимально используя свободное пространство внутри подъемника. При подъеме подвижной платформы 1 с грузом 21 оси 14 и 17, соединенные соответственно со штоком и корпусом силового цилиндра 2, сближаясь, своими роликами 15 раздвигает рычаги 4 и 5, увеличивая между ними угол 2oi. При этом рычаги 4 и 5 поворачиваются относительно опорных осей 7 и 10, поднимая верхникш своими концами подвижную платформу 1 и прокатываясь катками 9, установленными на осях 8 и 11 в свободных концах этих рычагов, по направляющим 3 платформы 1 и основания 2. В предельном верхнем положении подвижной платформы 1, когда угол раздвижения 2о6 рычагов 4 и 5 максимален, рабочее плечо, воспринимающее внешнюю нагрузку, становится минимальным, равным 2,, т.е. вдвое большим, чем плечо рабочее в аналогичной ситуации у подъемника с приводом, закрепленным на оси скрещения рычагов и управляющим только одной осью с раздвижными роликами (фиг. 1 и 2). Поэтому данный подъемник имеет большую эксплуатационную надежность.
I
Как и подъемник, приведенный на
фиг. 1 и 2, предлагаемое устройство оптимально работает с переменным гру- ,зом, изменяющимся от нуля до максимума (когда подъемник функционирует как накопитель - принимает заготовки от станка) или от максимума до нуля (когда подъемник выполняет функцию питателя - подает заготовки к станку).
I
Подъемник (фиг. 5 и 6, вариант 3) работает следующим образом.
Привод 12,.соединенный своим штоком с осью 14 и корпусом с шарнирно- рычажной груп пой, состоящей из оси 18 и сидящих на ней дополнительных рычагов 19 и 20, тянет ось 14 с роликами 15 и посредством этих роликов выводит рычаги 4 и 5 из нижнего положения .
Последние через дополнительные рычаги 19 и 20 перемещают ось 18 в направлении оси 6. По мере подъема подвижной платформы 1 с грузом 21, оси
51
14 и 18 сближаются с осью 6 скрещения рычагов 4 и 5, увеличивая угол 2 р между рычагами 19 и 20, выводя последние из характерной для них критической зоны на данном отрезке цикла. Пока величина Изменяющегося плеча t больше величины плеча f, работу раздвижения рычагов 4 и 5 производят ролики 15, а дополнительные рычаги 19 и 20 служат в этот период как бы упором для привода 12. Как только , станет меньше Е, рабочую функцию раздвижения рычагов 4 и 5 принимают на себя дополнительные рычаги 19 и 20, а ролики 15 начинают служить упором для привода 12. Поскольку плечо остается приблизительно постоянным по величине в период активного действия рычагов- подвесок, т.е. когда f,j, привод 12 способен передать в это время через дополнительные рычаги 19 и 20 значительные усилия на рычаги 4 и 5.
Соединение в одной конструкции роликов 15 и дополнительных рычагов 19 и 20 позволяет поднимать груз 21 постоянной массы на предельную для данного Подъемника высоту и удерживать его в этом положении. Таким образом, подъемник развивает повышенную мощность по сравнению с подъемными устройствами, приведенными на фиг. 1, 2 и 3, 4.
Опускание груза в подъемнике происходит в обратном порядке, только к действию привода добавляется действие массы груза. Расположение при120676
вода подъемника (вариант 1) в одной плоскости с осью роликов и осью скрещения рычагов упрощает кинематические связи в конструкции и умень- 5 шает ее габариты, металлоемкость.
Расположение привода подъемника (вариант 2) в одной плоскости с осью скрещения рычагов и двумя осями под
)0 раздвигающие ролики создает оптимальные условия работы привода (силового цилиндра), нагружая его чистой осевой нагрузкой, увеличивая рабочий ресурс подъемника, повышая его.эксплуатаци15 онную надежность.
Форм у л а изобретения
Подъемник, содержащий основа20 ние и подвижную платформу, соединенные между,.собой двумя параллельными шарнирно-рычажными системами типа нюрнбергские ножницы, привод подъема, включающий в себя ролики, закреп25 ленные на оси штока силового цилиндра и взаимодействующие с боковыми поверхностями одних концов рычагов указанной системы, отличающийся тем, что, с целью повы30 шения эксплуатационных характеристик путем улучшения распределения силовой нагрузки на привод, привод подъема снабжен двумя парами дополнительных рычагов, одними концами- прикреп35 ленных шарнирно к другим концам рычагов указанных систем, а другими концами - к корпусу силового цилиндра.
// 5 15
389
PU9.1
к съ
1
10
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| Привод подъемника | 1987 |
|
SU1585285A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| Подъемный стол | 1982 |
|
SU1054145A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
Изобретение относится к грузоподъемным устройствам. Подъемник содержит основание 2 и подвижную платформу 1, соединенные рычагами 4 и 5 по принципу нюрнбергских ножниц. Привод подъема связан с роликами 15, раздвигающими рычаги 4 и 5 и дополнительными рычагами 19 и 20, шарнирно закрепленными, на рычагах 4 и 5. 6 ил. б 12 го 13 1 / I II/ (Л N3 Х ъ
15
/
Редактор Н. Рогулич
Составитель А, Волощенко
Техред А.Кравчук Корректор С. Черни
Заказ 1931/22Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг. 5
| Патент Англии Р 1198607, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
