Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам.
Известен передвижной подъемник, содержащий опорную платформу с ходовой частью и рабочую площадку, соединенные между собой шарнирно-рычажным механизмом типа «Нюрнбергских ножниц», крайние шарниры рычагов которого связаны звеньями, шарнирно-сочлененными между собой и образующими две боковые складные лестницы, привод перемещения рычагов шарнирно-рычажного механизма, который с целью повышения его надежности в работе путем увеличения жесткости шарнирно-рычажной системы снабжен двумя параллельными плоскости шарнирно-рычажного механизма кронштейнами, жестко соединенными с опорной платформой и выполненными в виде треугольных рам, одна из сторон которых имеет криволинейный паз, причем в этих пазах размещены концы оси центрального нижнего шарнира указанного механизма, снабженные стопорами для фиксации рычагов, шарнирно-сочлененные звенья лестниц выполнены в виде жестких рам трапецеидальной формы, шарнирно связанных между собой меньшими основаниями, причем подъемник снабжен трособлочной системой, блоки которых установлены на осях крайних шарниров рычагов и на осях шарниров, соединяющих основания указанных жестких рам, при этом тросы запасованы через блоки и закреплены верхними концами на рабочей площадке, а нижние концы их соединены с натяжным устройством, установленным на опорной платформе (авторское свидетельство SU №1087459 А. М. кл.3 B66F 7/08. Передвижной подъемник. /В.В.Арбузов, В.Г. Толкачев (СССР). - Заявка №3486762/29-11. Заявлено 27.08.1982. Опубл. 23.04.1984, Бюл. №15. // Открытия. Изобретения. - 1984. - №15).
К недостаткам описанного передвижного подъемника относится неудовлетворительная его устойчивость при верхнем положении рабочей площадки (3) над опорной площадкой (1). Для обеспечения устойчивости рабочей площадки над опорной площадкой последнюю нагружают балластом (противовесом), а также шарниры (5) и (6) на рычагах (4) выполняют массивными, при этом пары шарнирно-рычажных механизмов смещают друг от друга на большое расстояние. Все это усложняет конструкцию подъемника и не гарантирует требуемую эксплутационную надежность.
Известен также грузоподъемный стол, содержащий основание и подвижную платформу, шарнирно связанные между собой перекрещивающимися рычагами типа «Нюрнбергские ножницы», и привод подъема, включающий в себя ходовой винт, смонтированный в корпусе зубчатого редуктора, зацепленный с гайкой, шарнирно смонтированный на плече одного из рычагов, и двигатель, связанный передачей гибким бесконечным звеном с редуктором, в котором с целью снижения габаритов в нижнем положении платформы редуктор и двигатель закреплены на соответствующих рамах, каждая из которых снабжена шарниром, который с возможностью возвратно-поступательного движения смонтирован в соответствующей направляющей, причем направляющие выполнены в основании, а рамы связаны между собой верхними и нижними шарнирными тягами, верхняя из которых параллельна линии, проходящей по нормали через оси валов редуктора и двигателя, и равна расстоянию между ними, а шарниры нижней тяги соосны с осями шарниров рам, причем обеими рамами и тягами образован шарнирно-рычажный параллелограммный четырехзвенник, нижняя тяга связана с нижним плечом другого рычага, а гайка - с верхним плечом одного рычага; с целью повышения надежности он снабжен дополнительными перекрещивающимися рычагами типа «Нюрнбергские ножницы», причем опоры шарниров основных и дополнительных указанных рычагов закреплены по краям стола, а подвижные плечи рычагов соединены между собой трособлочной системой (авторское свидетельство SU №1401005 А1. М. кл. 4 B66F 7/06. Грузоподъемный стол. / А.А.Разумов (СССР). - Заявка №4142121/29-11. Заявлено 31.10.1986. Опубл. 07.06.1988, Бюл. №21. // Открытия. Изобретения. - 1988. - №21).
К недостаткам описанного грузоподъемного стола, несмотря на дополнительные опоры перекрещивающихся рычагов типа «Нюрнбергские ножницы», относится то, что не обеспечивается эксплутационная надежность подвижной платформы (2) над основанием (1) при крайнем верхнем положении платформы. Поднимаемый груз на подвижной платформе в поперечно-вертикальной плоскости стола создает опрокидывающий момент, приводящий к разрушению роликовых опор (17) и шарнирных опор (19). Сущность заявленного изобретения заключается в следующем. Задача, на решение которой направлено заявленное изобретение, - обеспечение устойчивого положения грузовой платформы над основанием при любой высоте подъема.
Технический результат - повышение эксплуатационной надежности. Указанный технический результат достигается тем, что в известном грузоподъемном столе, содержащем основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий по меньшей мере две пары шарнирно соединенных перекрещивающихся рычагов, концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, и раздвижной привод в виде силового гидроцилиндра, согласно изобретению пары шарнирно-соединенных перекрещивающихся рычагов размещены в двух взаимно-перпендикулярных плоскостях и своими средними частями посредством втулок соединены общим шарниром, выполненным в виде крестовины, образованной внешним кольцом с цапфами в диаметральной плоскости кольца и диска с цапфами в его диаметральной плоскости, при этом кольцо и диск взаимно сопряжены единой сферической поверхностью, каждый конец перекрещивающихся рычагов посредством опоры качения смонтирован в соответствующей направляющей, а раздвижной привод выполнен в виде системы канатов, одни концы которых соединены с нижними концами обеих пар перекрещивающихся рычагов, а другие концы канатов связаны цапфами с осью, размещенной посредствам вилки на конце штока силового гидроцилиндра, при этом ветви канатов сопряжены с обводными роликами и блоками.
Изобретение поясняется чертежами.
На фиг.1 показан грузоподъемный стол, вид в плане.
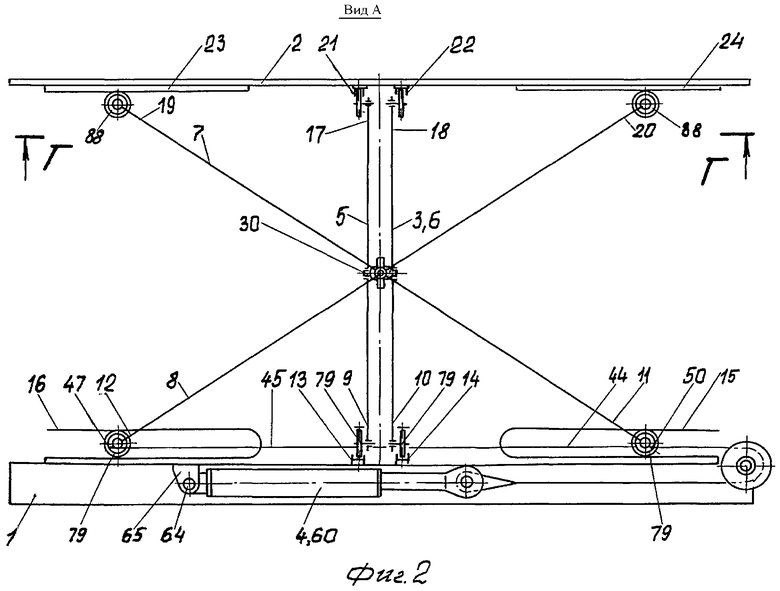
На фиг.2 - вид А на фиг.1, схематично представлен грузоподъемный стол, вид спереди.
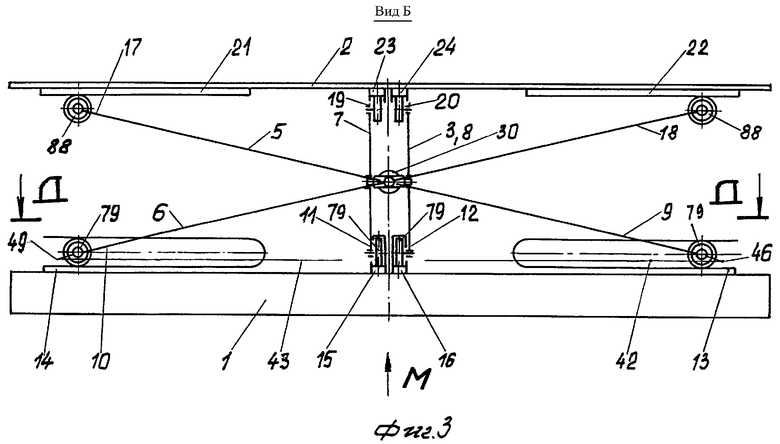
На фиг.3 - вид Б на фиг.1, вид грузоподъемного стола сбоку.
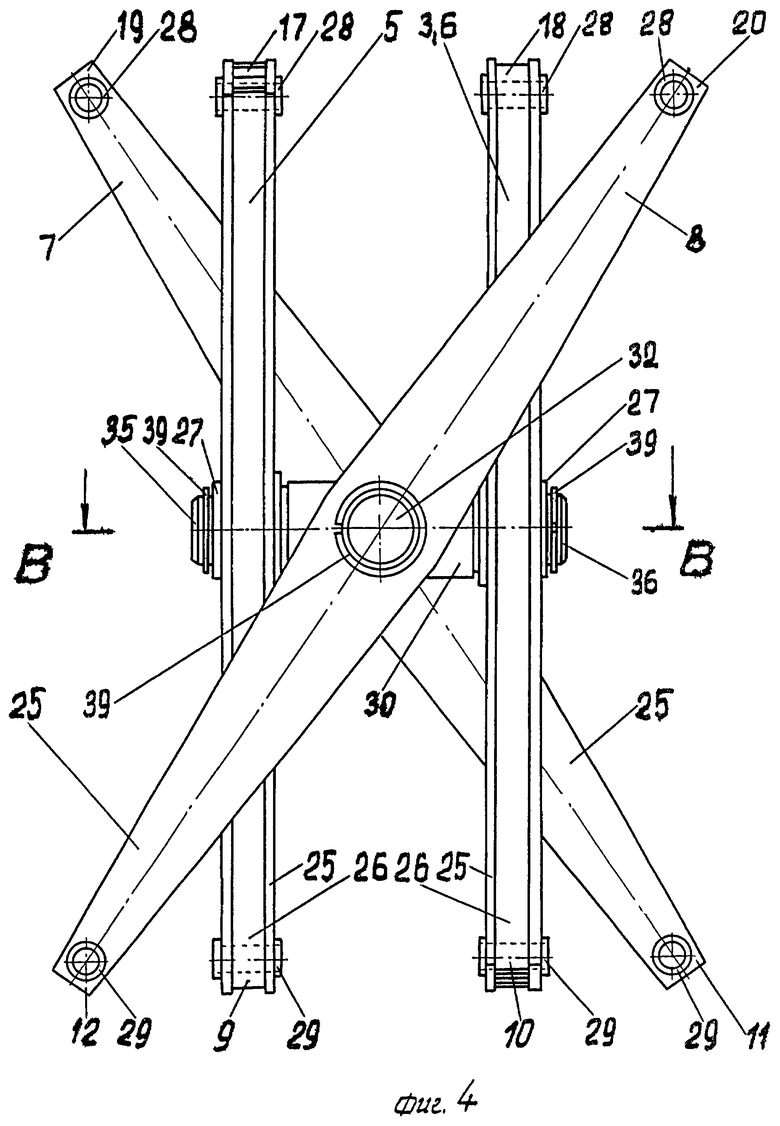
На фиг.4 изображены две пары перекрещивающихся рычагов в сборе с общим шарниром, вид спереди.
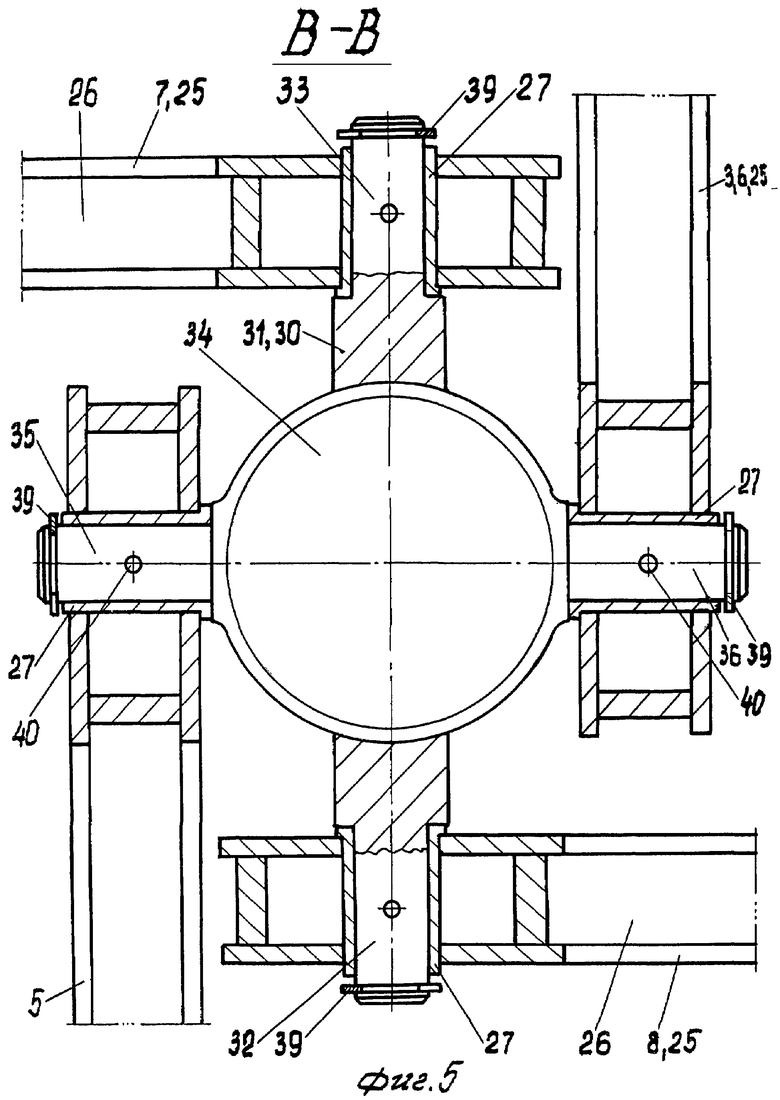
На фиг.5 - сечение В-В на фиг.4, горизонтальные сечения общего шарнира и средних втулок обеих пар перекрещивающихся рычагов на цапфах общего шарнира.
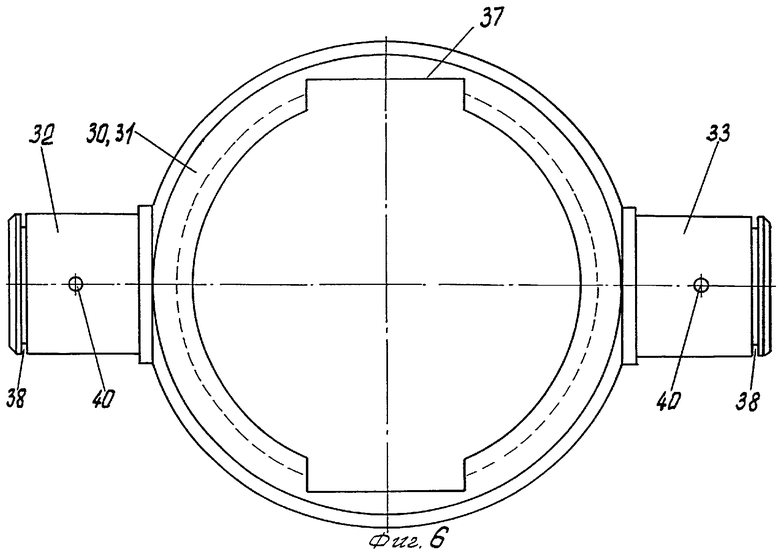
На фиг.6 показано внешнее кольцо общего шарнира с цапфами в диаметральной плоскости, вид в плане.
На фиг.7 - то же, вид сбоку.
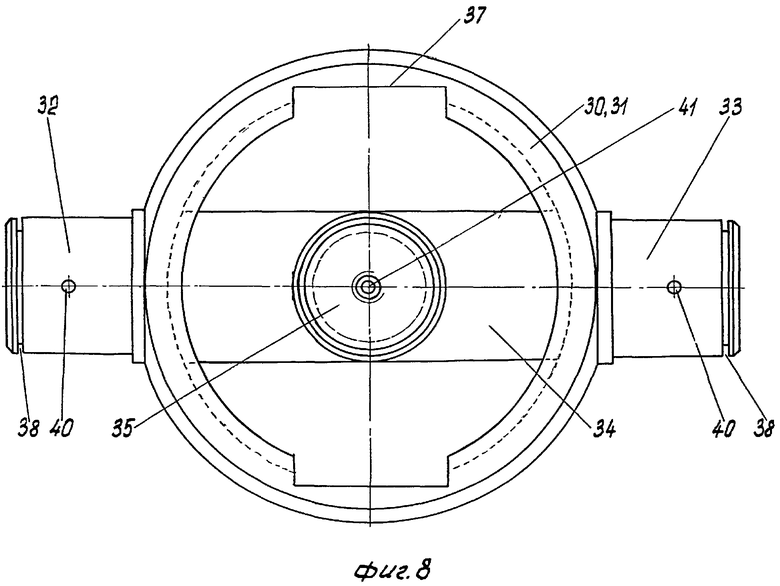
На фиг.8 представлен общий шарнир в сборе, вид спереди.
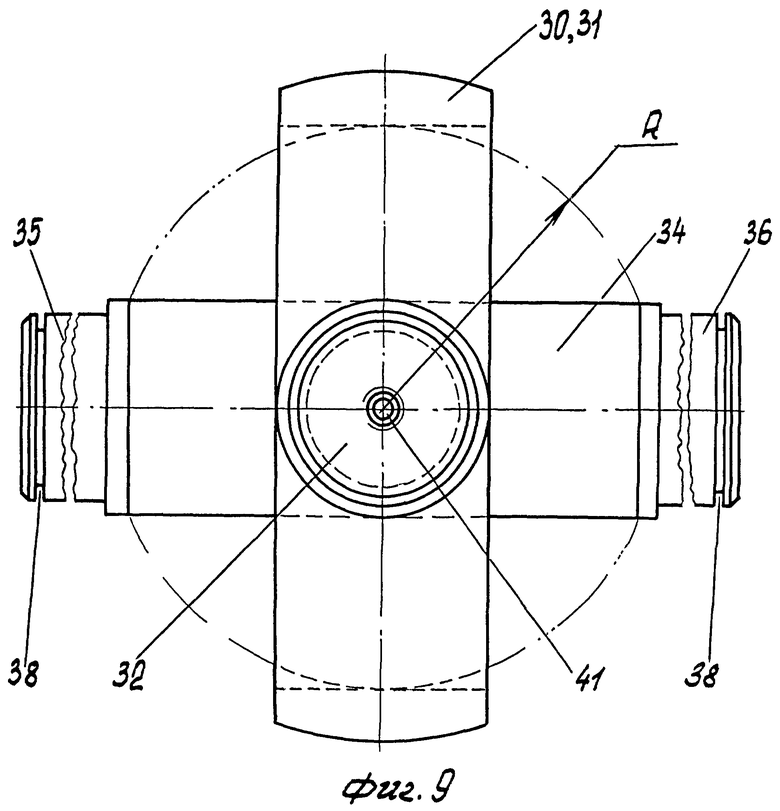
На фиг.9 - то же, вид сбоку.
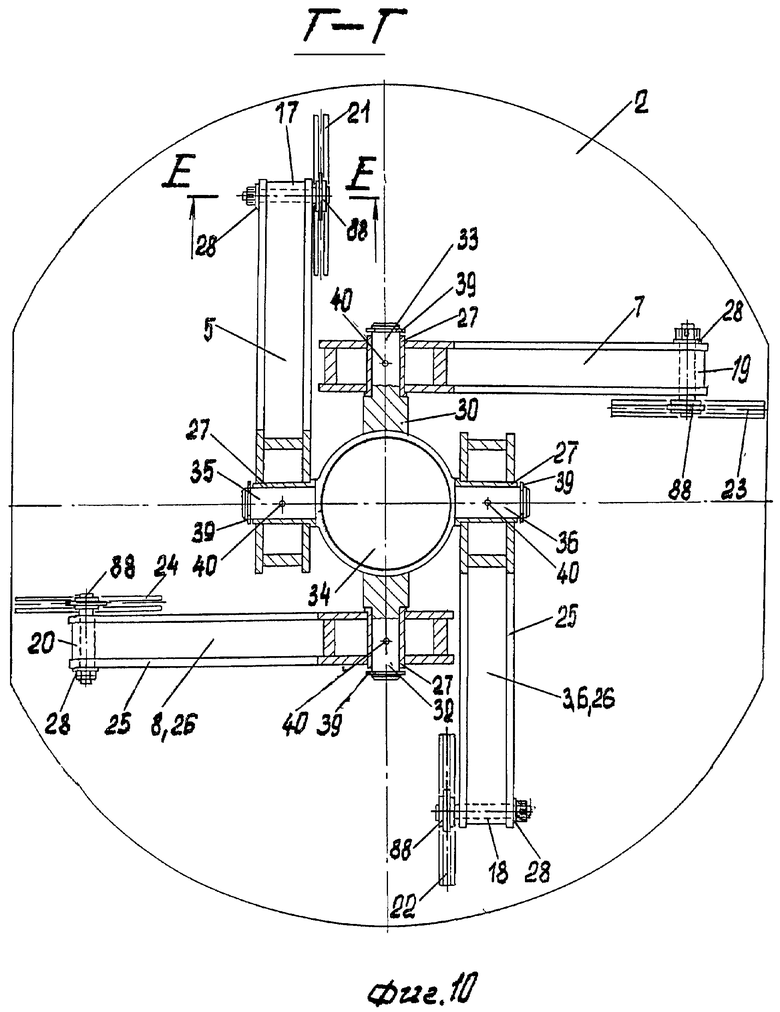
На фиг.10 - сечение Г-Г на фиг.2, положения опор качений на верхних концах перекрещивающихся рычагов в направляющих грузовой платформы.
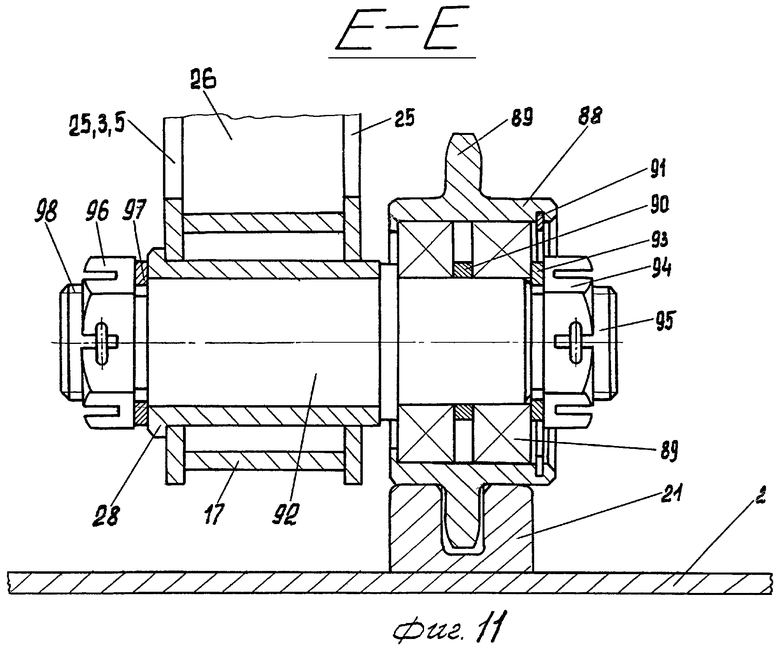
На фиг.11 - сечение Е-Е на фиг.10, вертикальный разрез опоры качения на верхнем конце перекрещивающегося рычага и направляющей грузовой платформы.
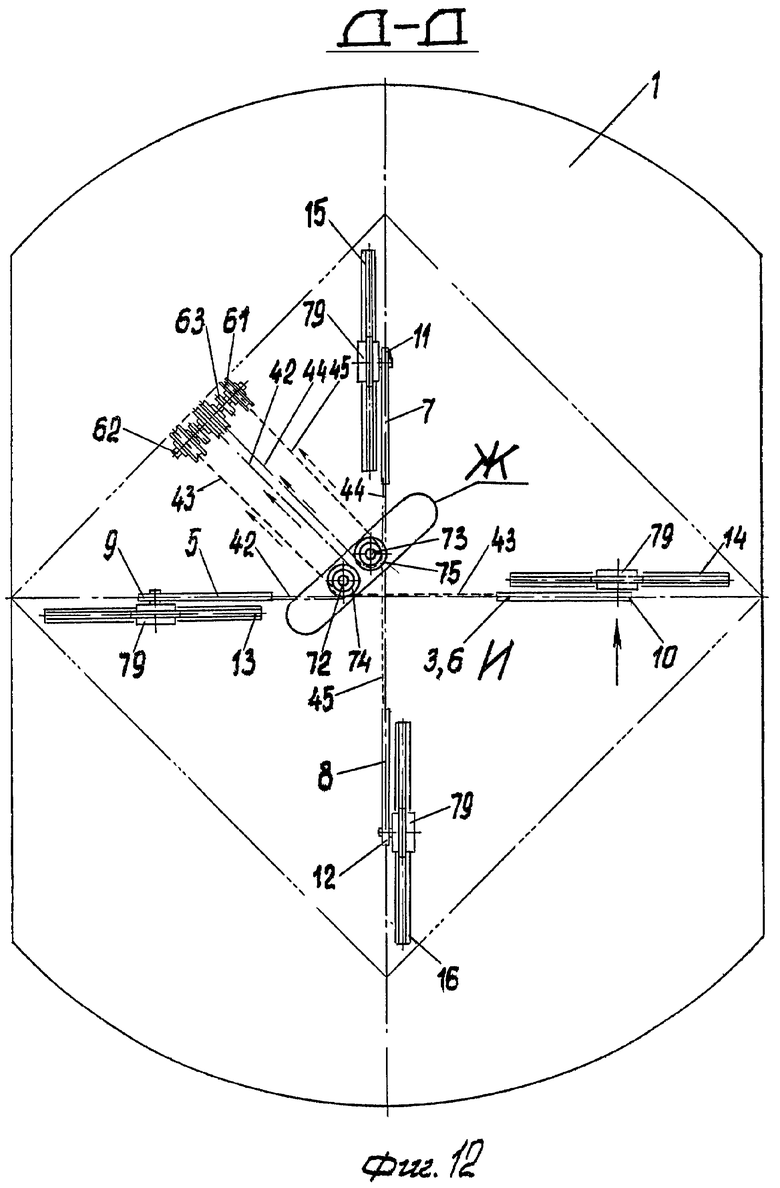
На фиг.12 - сечение Д-Д на фиг.3, кинематическая связь нижних концов обеих пар перекрещивающихся рычагов для синхронного перемещения в направляющих основания грузоподъемного стола.
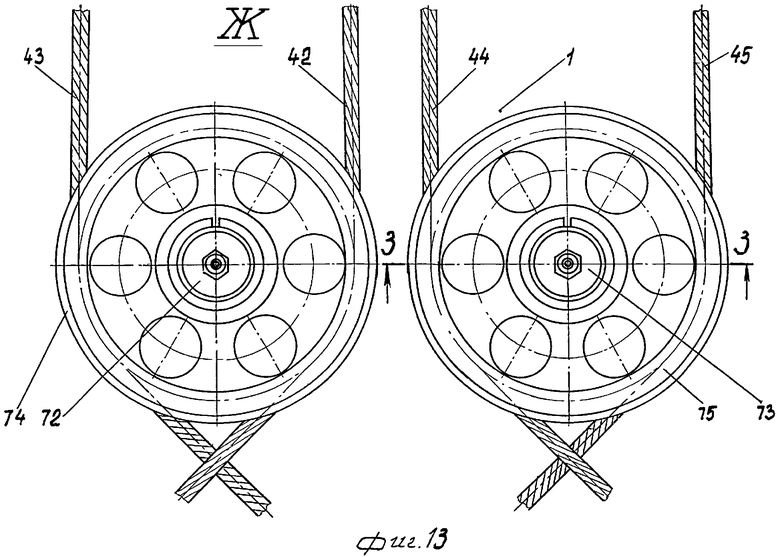
На фиг.13 - вид Ж на фиг.12, положения обводных роликов для изменения направления движения ветвей канатов.
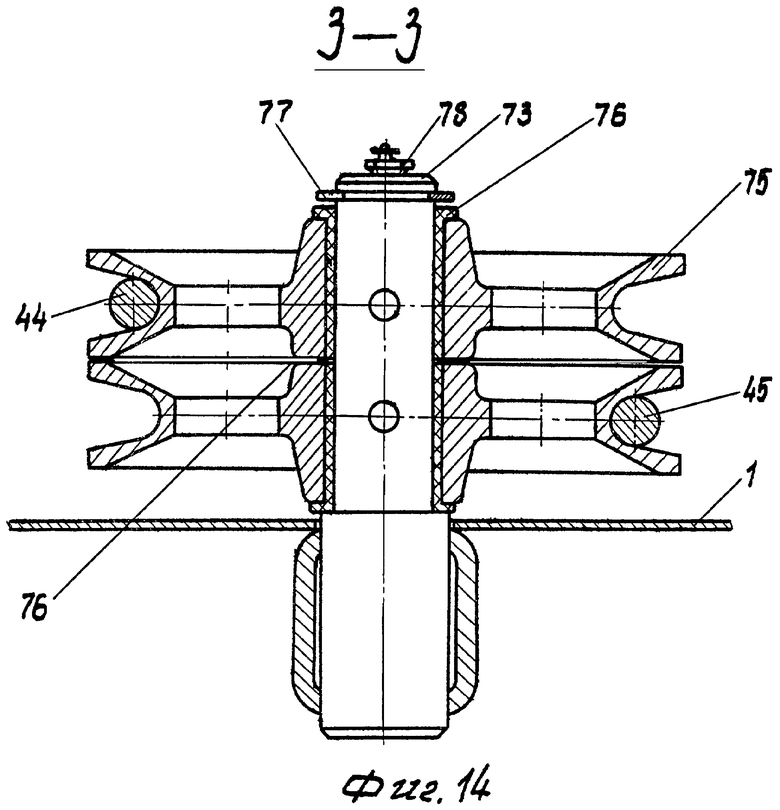
На фиг.14 - сечение З-З на фиг.13, положение пары обводных роликов на единой оси для изменения направления движения канатов.
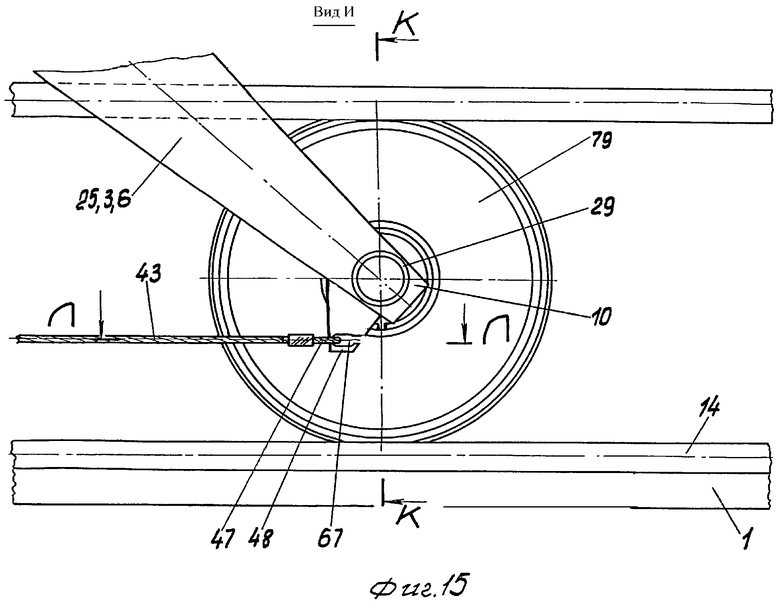
На фиг.15 - вид И на фиг.12, соединение конца каната с нижнем концом перекрещивающегося рычага.
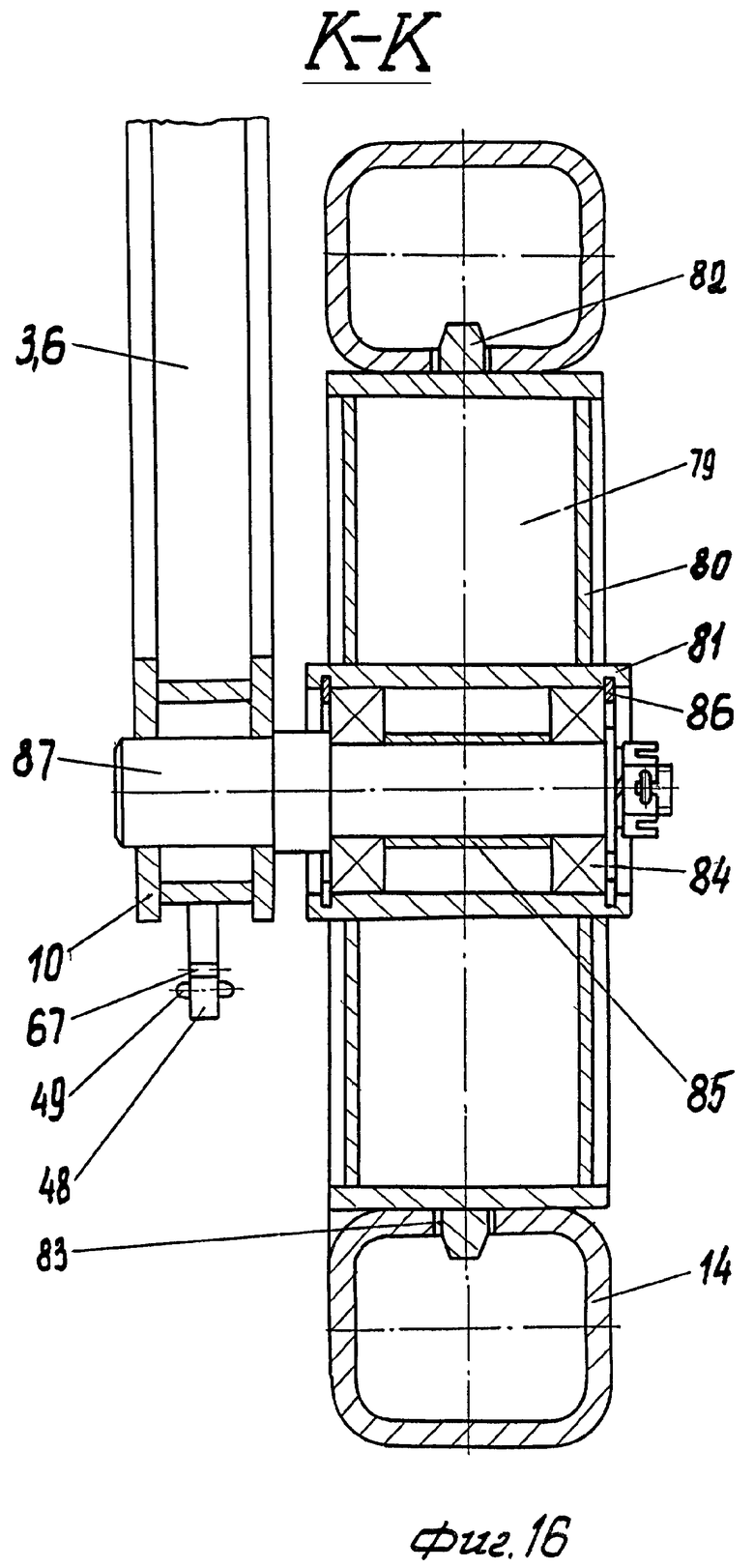
На фиг.16 - сечение К-К на фиг.15, вертикальный разрез опорного ролика и направляющей основания.
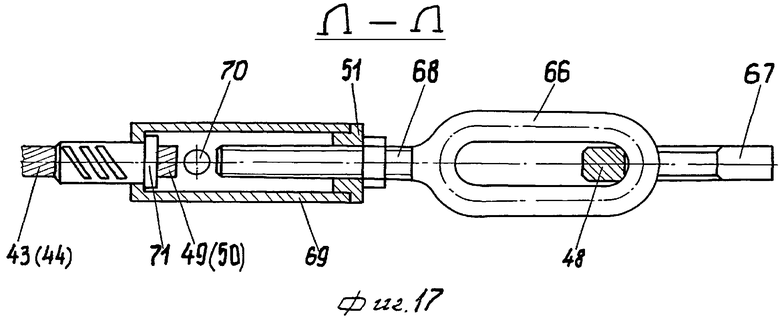
На фиг.17 - сечение Л-Л на фиг.15, диаметральный разрез талрепа на конце каната.
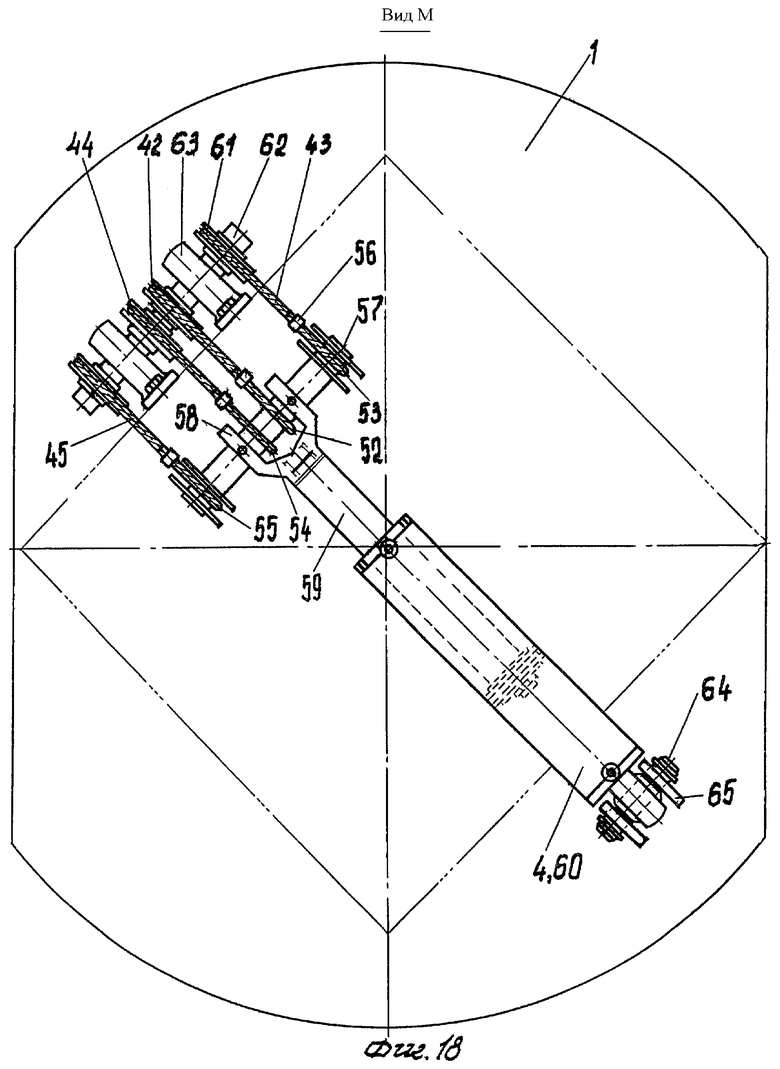
На фиг.18 - вид М на фиг.3, положение силового гидроцилиндра на тыльной стороне основания для привода канатов синхронного перемещения нижних концов обеих пар перекрещивающихся рычагов.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Грузоподъемный стол (см. фиг.1-3) содержит основание 1, грузовую платформу 2, расположенный между ними шарнирно-рычажный механизм 3 и раздвижной привод 4. Шарнирно-рычажный механизм 3 расположен между грузовой платформой 2 и основанием 1. Шарнирно-рычажный механизм 3 включает по меньшей мере две пары перекрещивающихся рычагов 5, 6, 7 и 8. Нижние концы 9, 10, 11 и 12 рычагов 5-8 смонтированы в направляющих 13, 14, 15 и 16 основания 1, а их верхние концы 17, 18, 19 и 20 размещены в направляющих 21, 22, 23 и 24 грузовой платформы 2.
Каждый рычаг 5 (6, 7, 8) (см. фиг.4 и 5) выполнен сварным и включает две боковины 25 из листовой стали, два ребра жесткости 26 из полосовой стали, втулку 27 в средней части и втулки 28 и 29 на верхнем конце 17 (18, 19, 20) и нижнем конце 9 (10, 11, 12) рычага 5 (6, 7, 8).
Пары шарнирно-перекрещивающихся рычагов 5, 6 и 7, 8 размещены в двух вертикальных и взаимно перпендикулярных пересекающихся плоскостях и своими средними частями посредством втулок 27 соединены общим шарниром 30 (см. фиг.2, 3, 4, 5, 6-9, 10).
Общий шарнир 30 (см. фиг.6-9) выполнен в виде кольца 31 (фиг.6 и 7) с цапфами 32 и 33 в диаметральной плоскости и диска 34 с цапфами 35 и 36 в диаметральной плоскости (фиг.5, 7 и 8). В кольце 31 шарнира 30 выполнен паз 37, ширина которого равна толщине диска 34. Диск 34 установлен в сферической полости кольца 31 при установке его в паз 37 с поворотом на угол 90°. Кольцо 31 и диск 34 сопряжены единой сферической поверхностью с радиусом сферы R (см. фиг.9).
На цапфах 32, 33 и 35, 36 выполнены кольцевые канавки 38 для установки стопорных колец 39, радиальные отверстия 40 и осевые резьбовые отверстия 41 для установки пресс-масленок (не показаны).
Первая пара перекрещивающихся рычагов 5, 6 (см. фиг.4, 5 и 10) посредством втулок 27 в средней части рычагов 5 и 6 размещена на цапфах 35 и 36 диска 34 общего шарнира 30. Вторая пара перекрещивающихся рычагов 7, 8 посредством втулок 27 размещена на цапфах 33 и 32 кольца 31 общего шарнира 30 (см. фиг.10).
Раздвижной привод 4 (см. фиг.2, 12-18) выполнен в виде системы канатов 42, 43, 44 и 45. Одни концы 46 и 47 канатов 42 и 45 на концах рычагов 5 и 8 соединены посредством кронштейнов 48 с нижними концами 9 и 12 рычагов 5 и 8 (фиг.2, 3, 12, 15 и 16). Другие концы 49 и 50 канатов 43 и 44 посредством талрепов 51 соединены с кронштейнами 48 на нижних концах 10 и 11 рычагов 6 и 7 (см. фиг.2, 3, 4 и 17). Таким образом, пары перекрещивающихся рычагов 5, 6, и 7, 8 соединены с концами 46, 49, 50, 47 канатов 42, 43, 44, 45.
Другие концы 52, 53, 54 и 55 тех же канатов 42-45 посредством коушей 56 размещены на оси 57. Ось 57 смонтирована посредством вилки 58 на конце штока 59 силового гидроцилиндра 60 раздвижного привода 4 (фиг. 18).
Ветви канатов 43, 42, 44 и 45 размещены на блоках 61, смонтированных на оси 62 (см. фиг.12 и 18). Ось 62 с корпусами 63 опор качений с возможностью демонтажа установлена на основании 1.
Силовой гидроцилиндр 60 раздвижного привода 4 посредством оси 64 смонтирован в кронштейнах 65 на нижней плоскости основания 1 (см. фиг.2 и 18).
Талреп 51 (см. фиг.17) смонтирован овальным звеном 66 в кронштейне 48 благодаря пазу 67 (см. фиг.15 и 16). Овальное звено 66 имеет резьбовой шток 68, размещенный в полой втулке 69 талрепа 51. Полая втулка 69 снабжена радиальными отверстиями 70 для установки воротка. В полой втулке 69, запрессованной на конце 49 (50) каната 43 (44), установлен упор 71.
Для установления направления движений ветвей канатов 43, 42, 44 и 45 на основании 1 посредством осей 72 и 73 (см. фиг.12-14) смонтированы обводные ролики 74 и 75. Каждый обводной ролик 74 (75) имеет литую ступицу с запрессованным подшипником скольжения 76. Пара роликов 75 (74) смонтирована на оси 73 (72) оппозитно друг к другу через плоскую шайбу 76 из нержавеющей стали. Осевое перемещение ступицы обводных роликов 74 (75) ограничено стопорным кольцом 77. Консистентная смазка в подшипники скольжения 76 в ступицах обводных роликов 75 (74) подается через радиальные и осевое отверстия и пресс-масленку 78.
Направляющие 16, 15 и 14, 13 на основании 1 смонтированы в двух взаимно перпендикулярных направлениях. В направляющих 13-16 размещены опорные ролики 79 (см. фиг.2, 3, 12, 15 и 16).
Каждый опорный ролик 79 (см. фиг.15 и 16), установленный с возможностью качения в направляющей 13 (14, 15, 16) основания 1, выполнен в виде полого цилиндра, фланцев 80 и ступицы 81. На внешней поверхности полого цилиндра в его средней части установлено плоское кольцо 82 для размещения в верхнем и нижнем пазах 83 направляющей 13 (14-16). В ступице 81 размещены пара радиальных шарикоподшипников 84 разовой смазки, дистанционная втулка 85 между подшипниками 84 и стопорные кольца 86 в канавках прямоугольного сечения на концевых участках полости ступицы 81. Ступица 81 размещена на оси 87, смонтированной на нижнем конце 10 (9, 11, 12) перекрещивающегося рычага 6 (5, 7, 8) (см. фиг.16).
Конструкция направляющих 13-16 исключает, кроме линейных, иные перемещения опорных роликов 79 с нижними концами 9-12 рычагов 5, 6, 7 и 8.
Опорный ролик 88 в направляющей 21 (22, 23, 24) грузовой платформы 2 (см. фиг.2, 3, 10 и 11) выполнен в виде ступицы с кольцом 89 на внешней поверхности. В ступице опорного ролика 88 размещены радиальные шарикоподшипники 89 разовой смазки, дистанционное кольцо 90 между шарикоподшипниками 89, стопорное кольцо 91 в кольцевой канавке. Ступица опорного ролика 88 вместе шарикоподшипниками 89 и дистанционным кольцом 90 размещены на консольной части оси 92. Осевое смещение шарикоподшипников 89 на оси 92 ограничено шайбой 93 и корончатой гайкой 94 на резьбовом хвостовике 95 оси 92. Ось 92 с возможностью демонтажа смонтирована во втулке 28 на верхнем конце 17 рычага 5 (6, 7, 8) и зафиксирована от осевых перемещений во втулке 28 посредством корончатой гайки 96 и плоской шайбы 97 на резьбовом хвостовике 98 оси 92 (см. фиг.11).
Грузоподъемный стол работает следующим образом.
После соединения рукавами высокого давления штуцеров силового цилиндра 60 привода 4 раздвижения с гидростанцией грузоподъемного стола и опробований перемещения штока 59 приступают к проверке синхронности перемещений опорных роликов 79 и направляющих 13-16 основания 1. При среднем положении выдвижения штока 59 силового гидроцилиндра 60 талрепами 51 выбирают слабину в ветвях канатов 42 и 43 в первой паре перекрещивающихся рычагов 5 и 6 шарнирно-рычажного механизма 3, а затем натягивают ветви канатов 44 и 45 во второй паре перекрещивающихся рычагов 7 и 8 (см. фиг.12 и 17). Затем полые резьбовые втулки 69 контргайками фиксируются на резьбовых штоках 68 овального звена 66 талрепа 51. Каждый опорный ролик 79 на конце 9, 10, 11 и 12 рычагов 5, 6, 7 и 8 сопряжен с соответствующей направляющей 13, 14, 15 и 16.
Подъем грузовой платформы 2 над основанием 1 происходит при втягивании штока 59 в полость силового цилиндра 60 раздвижного привода 4. При втягивании штока 59 вилка 58 смещает ось 57. Вместе с осью 57 в направлении кронштейнов 65 смещаются концы 55, 54, 52 и 53 канатов 45, 44, 42 и 43 (см. фиг.18). Размещенные на блоках 61 ветви канатов 42-45 благодаря оси 62 развивают двукратные усилия больше, чем доля от усилия на штоке 59 силового гидроцилиндра 60.
С блоков 61 на оси 62 ветви канатов 43 и 42 направляются на обводные ролики 74, а ветви канатов 44 и 45 - на ролики 75. Ветви канатов 42 и 43 своими концами 46 и 49 связаны с нижними концами 9 и 10 первой пары перекрещивающихся рычагов 5 и 6 шарнирно-рычажного механизма 3. Ветви канатов 44 и 45 своими концами 50 и 47 связаны с нижними концами 11 и 12 перекрещивающихся рычагов 7 и 8 (см. фиг.2 и 3). Линейные перемещения ветвей канатов 42-45 приводят к перемещению нижних концов 9-11 рычагов 5-8 посредством опорных роликов 79 в направляющих 13, 14, 15 и 16 к середине основания 1 грузоподъемного стола.
При синхронном перемещении опорных роликов 79 в направляющих 15 и 16 пара рычагов 7 и 8 благодаря втулкам 27 поворачивается на цапфах 33 и 32 кольца 31 общего шарнира 30.
Одновременно с этим происходят перемещения опорных роликов 79 в направляющих 13 и 14. Концы 9 и 10 рычагов 5 и 6 смещаются во взаимно встречном направлении. Втулки 27 рычагов 5 и 6 поворачиваются на цапфах 35 и 36 диска 34 общего шарнира 30. За счет сферической поверхности сопряжения кольцо 31 и диск 34 общего шарнира 30 совместно с цапфами 32, 33, 34 и 35 поднимаются над основанием 1, при этом проекция геометрического центра общего шарнира остается неизменной над основанием 1.
Поворот первый пары рычагов 5 и 6 на цапфах 35 и 36 и угловые смещения посредством втулок 27 второй пары рычагов 7 и 8 на цапфах 33 и 32 общего шарнира 30 приводит к тому, что верхние концы 17, 18, 19 и 20 рычагов 5, 6, 7 и 8 синхронно взаимно сближаются от периферийной кромки грузовой платформы 2.
Перемещение верхних концов 17-20 рычагов 5-8 в среднюю часть грузовой платформы 2 приводит к тому, что опорные ролики 88, перекатываясь в пазах направляющих 21-24, поднимают грузовую платформу 2 над основанием 1.
При достижении заданной высоты подъема грузовой платформы 2 над основанием 1 прекращают подачу рабочей жидкости в штоковую полость силового гидроцилиндра 60.
При опускании грузовой платформы 2 в сторону основания 1 оператор положение ручки управления гидрозолотника гидростанции грузоподъемного стола переводит в положение «плавающее», соединяя гидравлически штоковую полость с бесштоковой полостью силового гидроцилиндра 60. Под действием силы веса грузовой платформы 2 перекрещивающиеся рычаги 5-8 приводят в исходное положение.
Таким образом, повышенная устойчивость грузовой платформы 2 над основанием 1 достигается тем, что в работе перекрещивающиеся рычаги 5-8 размещены по ребрам правильной пирамиды с вершиной, совмещенной с геометрическим центром общего шарнира 30, при этом проекция вершины пирамиды на основании 1 остается как при подъеме, так и при опускании неизменной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385285C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381987C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381986C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361808C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2329943C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2308412C1 |

Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам. Стол содержит основание, грузовую платформу, шарнирно-рычажной механизм и раздвижной привод. Пара шарнирно-соединенных перекрещивающихся рычагов указанного выше механизма размещена в двух взаимно перпендикулярных плоскостях. Посредством втулок в средних частях указанные рычаги соединены с цапфами общего шарнира. Общий шарнир выполнен в виде крестовины, образованной внешним кольцом с цапфами в диаметральной плоскости и диска с цапфами. Кольцо и диск общего шарнира сопряжены единой сферической поверхностью. Каждый конец перекрещивающегося рычага посредством опоры качения смонтирован в направляющей. Направляющие размещены на основании и грузовой платформе. Раздвижной привод выполнен в виде системы канатов. Одни концы канатов соединены с нижними концами обеих пар перекрещивающихся рычагов. Другие концы этих же канатов связаны коушами с осью, размещенной посредством вилки на конце штока силового гидроцилиндра. Ветви канатов спряжены с обводными роликами и блоками. Стол обеспечит устойчивое положение грузовой платформы над основанием при любой высоте подъема. 18 ил.
Грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий по меньшей мере две пары шарнирно соединенных перекрещивающихся рычагов, концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, и раздвижной привод с силовым гидроцилиндром, отличающийся тем, что пары шарнирно соединенных перекрещивающихся рычагов размещены в двух взаимно перпендикулярных плоскостях и своими средними частями посредством втулок соединены общим шарниром, выполненным в виде крестовины, образованной внешним кольцом с цапфами в диаметральной плоскости кольца, и диска с цапфами в его диаметральной плоскости, при этом кольцо и диск взаимно сопряжены единой сферической поверхностью, каждый конец перекрещивающихся рычагов посредством опоры качения смонтирован в соответствующей направляющей, а раздвижной привод выполнен в виде системы канатов, одни концы которых соединены с нижними концами обеих пар перекрещивающихся рычагов, а другие концы канатов связаны коушами с осью, размещенной посредством вилки на конце штока силового гидроцилиндра, при этом ветви канатов сопряжены с обводными роликами и блоками.
| Грузоподъемный стол | 1986 |
|
SU1401006A1 |
| СПОСОБ ПОПЕРЕЧНОГО ПОДЪЁМА И СПУСКА СУДНА НА ВОДУ | 2014 |
|
RU2577584C1 |
| Способ получения фосфорной кислоты | 1973 |
|
SU551248A1 |

