I
Изобретение относится к электротехнике, а именно к электрическим машинам малой мощности, и может быть использовано в программном управлени электроприводами в качестве устройства для непрерывного контроля за перемещением исполнительных механизмов
Целью изобретения является расширение функциональных возможностей путем обеспечения измерения линейной скорости.
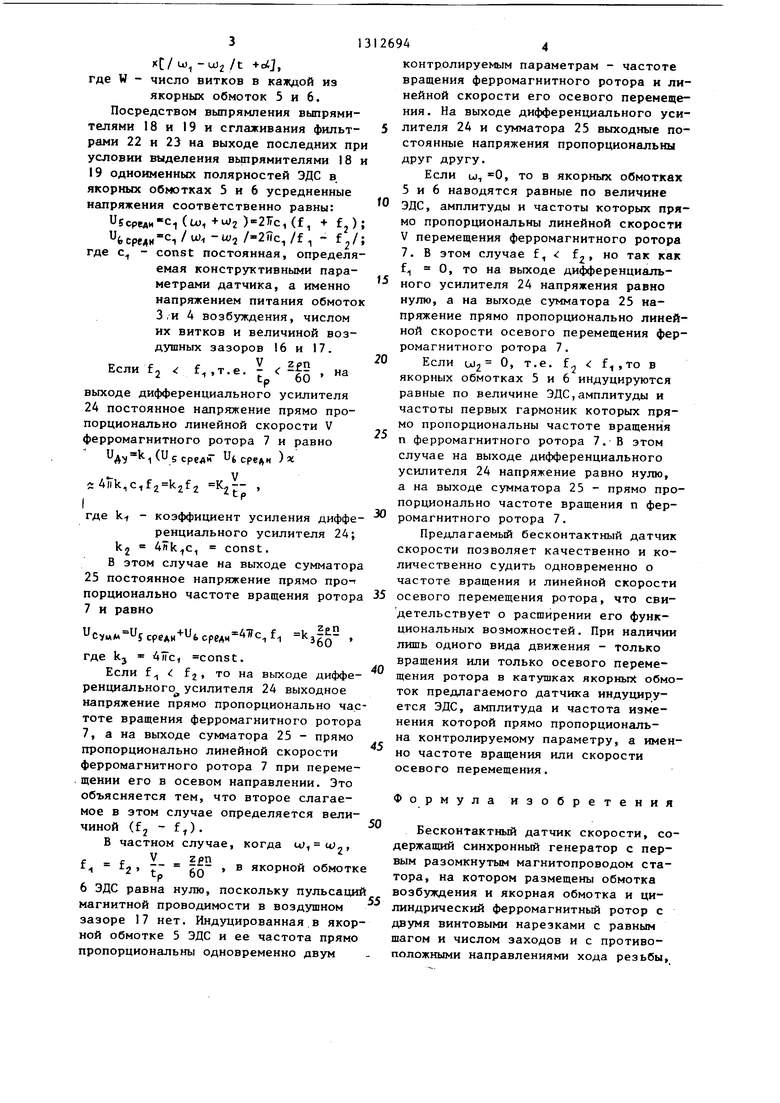
На фиг.1 - показан предлагаемый датчик; на фиг.2 - принципиальная электрическая схема датчика.
Бесконтактный датчик скорости содержит синхронный генератор с разомкнутыми магнитопроводами 1 и 2 статора, на которых размещены обмотки 3 и А возбуждения и якорные обмотки 5 и 6, ферромагнитный ротор 7 с винтовыми нарезками 8 и 9 с шагом t- и числом заходов Zp. Магнитопроводы 1 и 2 статора имеют полюсы 10, II и 12, 13 соответственно, на которых могут быть выполнены зубцы 1 и 15 с зубцовым делением, равным tp. Магнитопроводы 1 И 2 статора установлены с зазорами 16 и 17 относительно ферромагнитного ротора 7. Устройство содержит также выпрямители I8 и I9 с резисторами 20 и 21 нагрузки, сглаживающие фильтры 22 и 23, дифференциальный усилитель 2А и сумматор 25. Ротор 7 имеет возможность одновременного осевого и вращательного перемещения относительно разомкнутых магнитопроводов I и 2 статора. Для увеличения магнитной проводимости воздушных зазоров 16 и 17 профили винтовых нарезок 8 и 9 целесообразно выполнить четырехугольными.
Бесконтактный датчик скорости работает следующим образом.
При питании обмоток 3 и 4 возбуждения, соединенньпс между собой, например, согласно-последовательно (фиг.2), возникает магнитное поле, линии которого пронизывают одновременно разомкнутые магнитопроводы I и 2 статора, воздушные зазоры 16 и 17 и цилиндрический ферромагнитный ротор 7.
При одновременном вращении цилиндрического ферромагнитного ротора 7 с частотой вращения п (об/мин) и осевом перемещении его с линейной скоростью V (м/с) происходит осевое перемещение профилей винтовых нарезок
0
69А2
8 и 9. При этом в воздушном зазоре под одним разомкнутым магнитопрово- дом статора за счет совпадения направлений перемещения профилей винтовой нарезки с направлением перемещения самого ферромагнитного ротора угловая частота Ыд определяется суммой угловых частот и)ц u) u)« , а в воздушном зазоре под вторым разомкнутым магнитопроводом статора за счет противоположных одно относительно другого направлений перемещения, профилей винтовой нарезки и направления перемещения самого ротора угловая частота и)„ определяется абсолютной по величине разностью угловых частот u)g / ш - w ( (модуль учитывает возможность двух случаев, когда ui 7/0)2 и когда ). где u)i , - угловая частота, полученная только за счет вращения цилиндрического ферромагнитного ротора 7; си 2Tifj - угловая частота, полученная только за
е счет осевого перемещения цилиндрического ферромагнитного ротора 7, причем
f П - f Y
1 60 2 tp где tp - шаг винтовых нарезок 8 и 9. При одновременном вращении и осевом перемещении ферромагнитного ротора 7 в направлениях, показанных, например, сплошными стрелками (фиг.1), первые гармоники магнитных потоков и в воздушных зазорах 16 и 17 соответственно под разомкнутыми магнитопроводами 1 и 2 статора пульсируют во времени с амплитудой ф относительно постоянной составляющей ф по следующим законам:
Ф, Фо + Ф,пС05 C(u), )
f Фо - Фп,С08 /to,- u)2/t +oij,
где d - электрический угол сдвига
между разомкнутыми магнито- проводами I и 2.
В общем случае 2 л, так как к якорным обмоткам 5 и 6 подсоединены выпрямители 18 и 19 соответственно.
В результате изменения указанных потоков во времени в як ррных обмотках 5 и 6 индуцируются соответствующие ЭДС:
cJ4,
5 Uy - W -j- Ыф(ш,-Ьса2)з1п (и)
-I- U)2 )
dФ2 U - W -7- W ф /Lo -ujj/sin X
0
U) -Ы2 /t +oCj,
где W - число витков в каждой из якорных обмоток 5 и 6.
Посредством выпрямления выпрямителями 18 и 19 и сглаживания фильтрами 22 и 23 на выходе последних при условии выделения вьшрямителями I8 и 19 одноименных полярностей ЭДС в. якорных обмотках 5 и 6 усредненные напряжения соответственно равны:
UscpeAM-c(to, )-27rc,(fi + f2 ;
ьсреди С1/ - 2/-2 -. - где с, - const постоянная, определяемая конструктивными параметрами датчика, а именно напряжением питания обмоток 3,и 4 возбуждения, числом их витков и величиной воздушных зазоров 16 и 17.
Если ff,т.е.
60
на
выходе дифференциального усилителя 24 постоянное напряжение прямо пропорционально линейной скорости V ферромагнитного ротора 7 и равно 5 срелй Ufc )ж
г 4n k,
I
где k - коэффициент усиления дифференциального усилителя 24; k2 , const. В этом случае на выходе сумматора 25 постоянное напряжение прямо npo-t порционально частоте вращения ротора 7 и равно
k
UcvwM Uf cpeAн Ь среАн с, f где kj , const.
Если f fa то на выходе дифференциального усилителя 24 выходное напряжение прямо пропорционально частоте вращения ферромагнитного ротора 7, а на выходе сумматора 25 - прямо пропорционально линейной скорости ферромагнитного ротора 7 при перемещении его в осевом направлении. Это объясняется тем, что второе слагаемое в этом случае определяется величиной (fj - f).
В
частном
..ьслучае,
zpn
б5
когда tu, 0)2 в якорной обмотк
6 ЭДС равна нулю, поскольку пульсаций магнитной проводимости в воздушном зазоре 17 нет. Индуцированная в якорной обмотке 5 ЭДС и ее частота прямо пропорциональны одновременно двум
контролируемым параметрам - частоте вращения ферромагнитного ротора и линейной скорости его осевого перемещения. На выходе дифференциального усилителя 24 и сумматора 25 выходные постоянные напряжения пропорциональны друг другу.
Если ы, 0, то в якорных обмотках 5 и 6 наводятся равные по величине ЭДС, амплитуды и частоты которых прямо пропорциональны линейной скорости V перемещения ферромагнитного ротора
5
0
5
0
5
0
5
0
5
7. f.
В этом случае f, : f , но так как
Lj V f, , то в 6 индуцируются
1. - О, то на выходе дифференциального усилителя 24 напряжения равно нулю, а на выходе сумматора 25 напряжение прямо пропорционально линейной скорости осевого перемещения ферромагнитного ротора 7.
Если Ы2 0 т.е. f якорных обмотках 5 и равные по величине ЭДС,амплитуды и частоты первых гармоник которых прямо пропорциональны частоте вращения п ферромагнитного ротора 7.-В этом случае на выходе дифференциального усилителя 24 напряжение равно нулю, а на выходе сумматора 25 - прямо пропорционально частоте вращения п ферромагнитного ротора 7.
Предлагаемый бесконтактный датчик скорости позволяет качественно и количественно судить одновременно о частоте вращения и линейной скорости осевого перемещения ротора, что сви- детельствует о расширении его функциональных возможностей. При наличии лишь одного вида движения - только вращення или только осевого перемещения ротора в катушках якорных обмоток предлагаемого датчика индуцируется ЭДС, амплитуда и частота изменения которой прямо пропорциональна контролируемому параметру, а именно частоте вращения или скорости осевого перемещения.
Формула изобретения
Бесконтактный датчик скорости, содержащий синхронный генератор с первым разомкнутым магнитопроводом статора, на котором размещены обмотка возбуждения и якорная обмотка и цилиндрический ферромагнитный ротор с двумя винтовыми нарезками с равным шагом и числом заходов и с противоположными направлениями хода резьбы.
5
одна из которых выполнена на наружной поверхности ротора, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения и змерения линейной скорости, он снабжен вторым маг- нитопрсводом статора, идентичным первому, двумя сглаживающими фильтрами и выпрямителями, дифференциаль- laiM усилителем и сумматором, вторая винтовая нарезка ротора выполнена
126946
на его наружной поверхности, магни- топроводы статора установлены вдоль оси ротора, каждый из них размещен в зоне одной из винтовых нарезок, 5 ротор установлен с возможностью осевого перемещения, при этом каждая из якорных обмоток подключена через один из вьтрямителей к сглаживающе фильтру, каждый из которых соединен с дифференциальным усилителем и с сумматором.
fO
/
16
СШ.
75
77
Редактор И.Шулла
Составитель Т.Калашникова
Техред Л.Сердюкова Корректор Г.Решетник
Заказ 1978/54 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Фиг/
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический генератор | 1984 |
|
SU1169093A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| Устройство для измерения скорости | 1988 |
|
SU1673980A1 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| Вентильная электрическая машина | 1986 |
|
SU1377974A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006143C1 |
| Электрическая машина с возбуждением от постоянных магнитов | 1987 |
|
SU1495940A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Инерционный накопитель энергии электромашинного типа | 1972 |
|
SU1094114A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1991 |
|
RU2033678C1 |
Изобретение относится к электротехнике, а именно к электрическим машинам малой мощности, и может быть использовано в качестве устройства для контроля за перемещением исполнительных механизмов. Целью изобретения является расширение функциональных возможностей путем обеспечения измерения линейной скорости. Бесконтактный датчик скорости содержит разомкнутые магнитопроводы I и 2 статора с обмотками 3 и 4 возбуждения и с якориыми обмотками 5 и 6. Ротор 7 выполнен цилиндрическим с двумя винтовыми нарезками 8 и 9 на его наружной поверхности, в зоне которых размещены разомкнутые магнитопроводы 1 и 2 статора. Указанные винтовые нарезки выполнены с равным шагом и числом заходов и с противоположными направлениями хода резьбы, а ротор 7 установлен с возможностью вращения и осевого перемещения одновременно. Каждая из якорных обмоток 5 и 6 подключена через один из выпрямителей 18 и 19 к сглаживающему фильтру 22 и 23 соответственно, каждый из которых соединен с дифференциальным усилителем 24 и с сумматором 25. Предла- гаемьЕй бесконтактный датчик скорости позволяет одновременно качественно и количественно судить о частоте вращения и линейной скорости перемещения ротора, что расширяет его функциональные возможности при контроле за перемещением исполнительных механизмов. 2 ил. С б (Л со со J:ib
| Электрический генератор | 1984 |
|
SU1169093A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
