(54) ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ
I
Изобретение относится к электромашиностроению и может быть использовано в приводах, где требуется как совместно осевое и вращательное перемещение подвижного элемента, так и реализация движения этого вида при необходимости плавно регулировать скорости перемещения в широком диапазоне и осуществлять точный останов рабочего органа. Одной из важнейших областей возможного применения предлагаемого озобретения является электропривод металлообрабатывающих станков, промышленных роботов и манипуляторов .
Известен электрический двигатель, дающий возможность получить винтовое, либо раздельное перемещение подвижного элемента за счет особой конструкции статора и ротора двигателя. В этом двигателе индуктор состоит из двух частей: одна из них выполняется с кусочко-кольцевыми зубцами, а другая - в виде статора обычного асинхронного двигателя. Ротор двигателя имеет винтовую и продольную зубчатую нарезки. При одновременной передаче питания на обмотки линейной и поворотной части якорь совершает сложное линейно-поворотное движение, а при
раздельном токоподводе ротор совершает либо вращательное, либо линейное перемещение 1.
Недостатком этого технического решения является ограниченная величина перемещения подвижного элемен-та.
Наиболее близким к изобретению является электрический двигатель, со10держащий магнитопровод статора, иесущий обмотки вращательного и поступательного перемещения, установленные одна за другой в аксиальном направлении, и ферромагнитный ротор
15 2.--. ,
Недостатками этого двигателя являются ограниченная величина перемещения подвижного элемента (ротора), сложность обеспечения широкого- диапа20зона регулирования схорости, что обусловлено органическими свойствами электрических машин переменного тока, технологические сложности, возникающие при изготовлении ротора, что связано с необходимостью изготов25ления на нем двух видов нарезок - винтовой и продольной.
Цель изобретения - упрощение конструкции и расширение функциональных
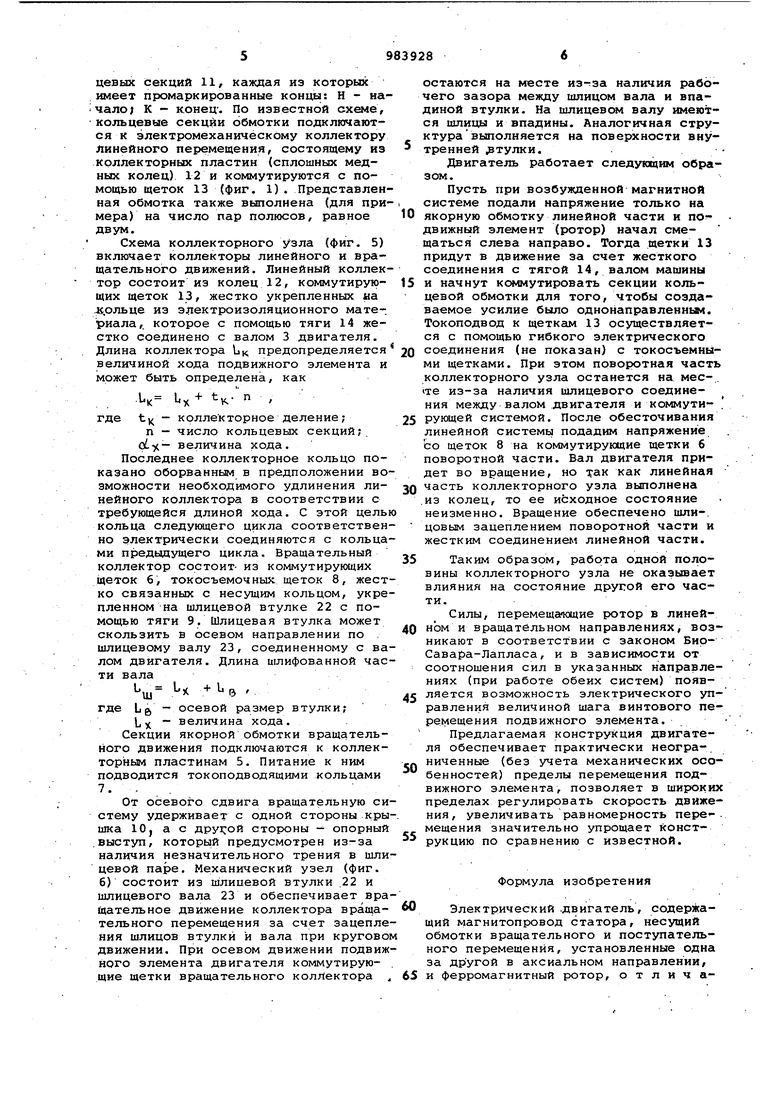
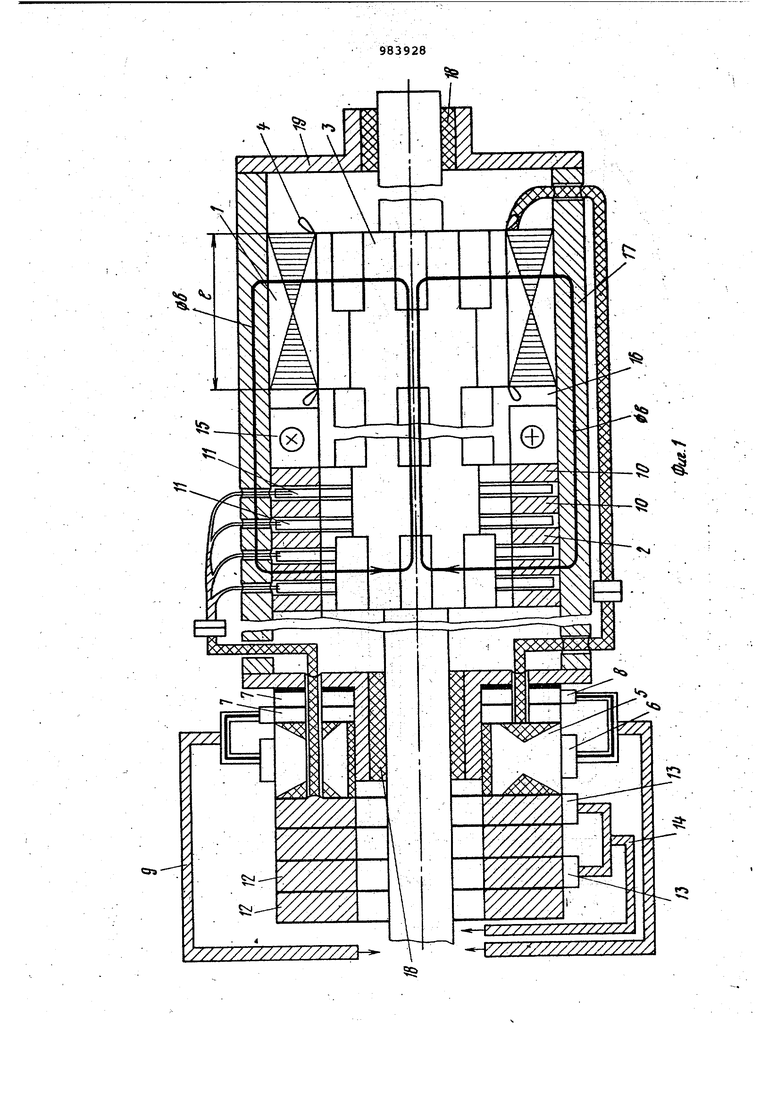
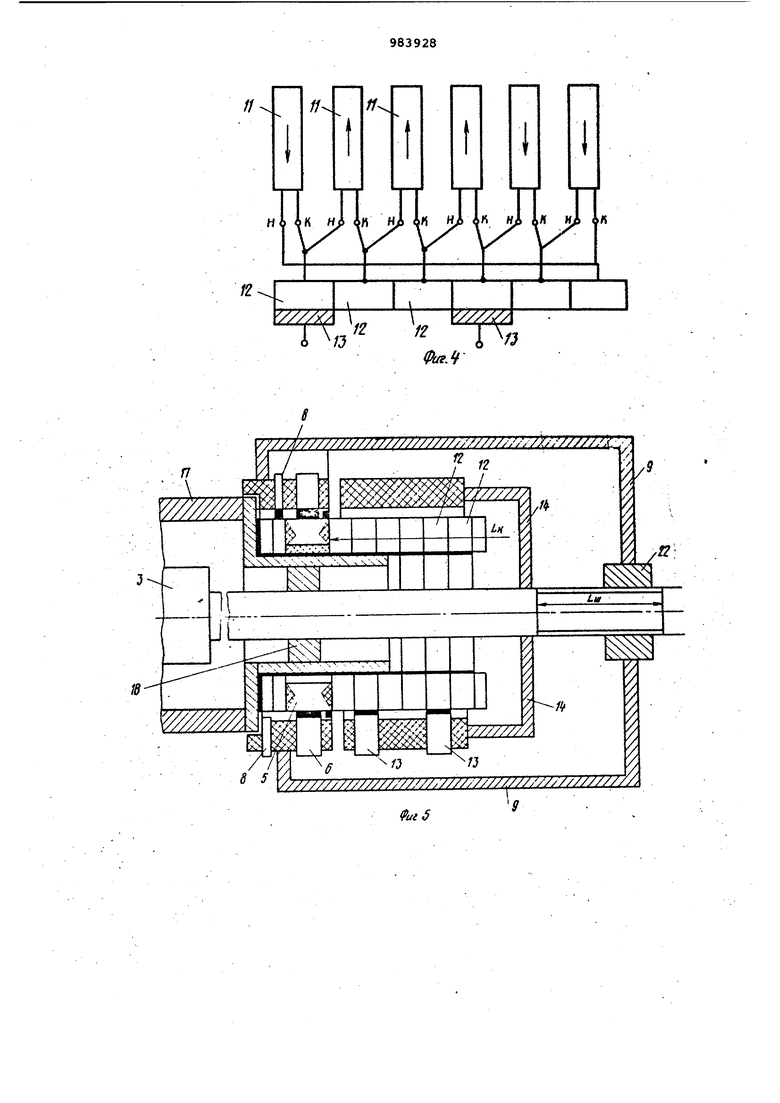
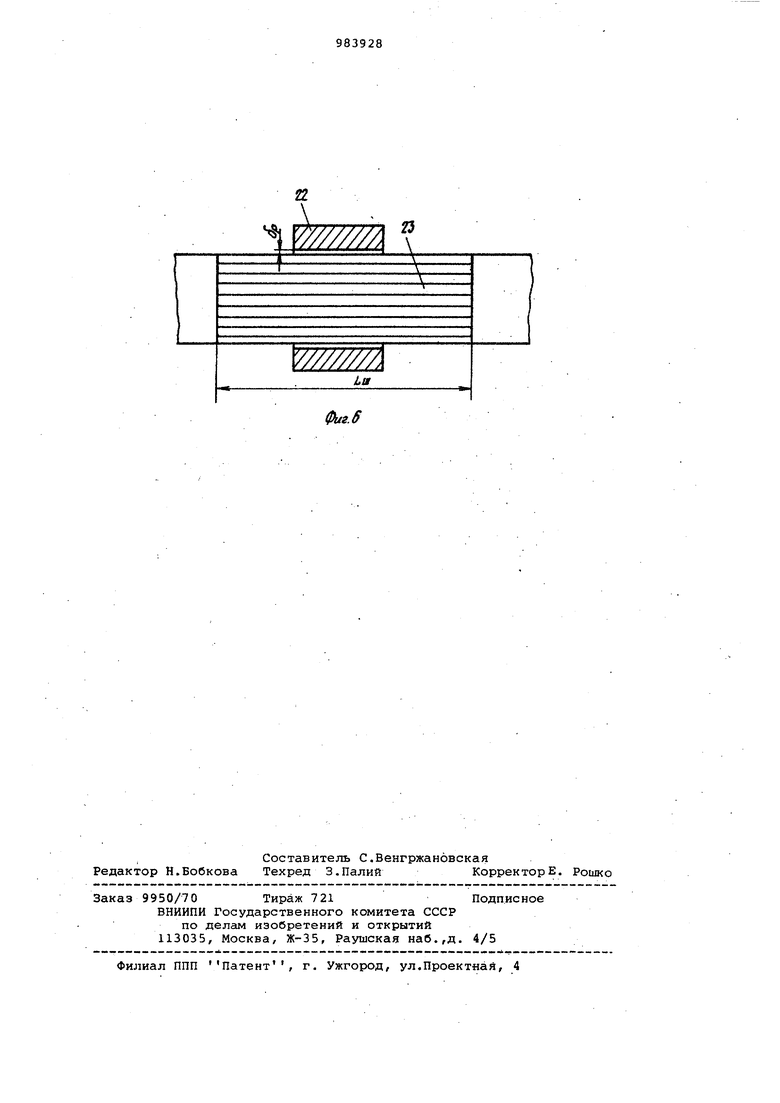
30 возможностей. Эта цель ддстигается тем, что эйе ктрический двигатель снабжен цилиндррпеским электромеханическим коллектором и линейным электромеханическим коллектором, между обмотками вращательного и поступательного перемещения выполнен, кольцевой паз, в котором размещена обмотка возбуждения, . а ротор имеет ферромагнитные высту.пы, размещенные в осевом направлении . на расстоянии 6/2 и имеющие длину в этом, направлении, равную S/2, при этом ширина выступов, измеряемая по внешней окружности, равна (. и расстояние меж,цу ними в направлении вра щения равно { 2 -с( ) , где С- расчетна я длина статора, зан маемая как обмоткой вращател ного перемещения, так и обмоткой поступательного перемещения;t- полюсное деление обмотки, обеспечивающей вращательное перемещение; Ci коэффициент полюсной дуги. На фиг. 1 изобргшен двигатель, об щий вид; на фиг. 2 магнитопровод ротора с кольцевыми выступами, форми рующими, магнитное поле; на фиг. 3 схема якорной обмотки вращательной части; на фиг. 4 - схема якорной обмотки линейной части; на фиг. 5 - ко ллекторный узел двигателя; на фиг.б щлицевой муфты. Магнитопровод статора предлагаемо го двигателя состоит из двух частей 1 и 2, обеспечивающих соответственно вращение и осевое перемещение ротора 3. Статор 1 активной длиной 6 выполняется в виде цилиндрического магнитопровода, аналогично обычному стато ру асинхронной машины, в пазах которого размещается якорная обмотка 4 по типу якорных обмоток постоянного тока. Коммутация секции этой якорной обмотки может производиться, например, с помощью цилиндрического коллектора (фиг. 1), состоящего из коллекторных пластин 5, коммутирующнх щеток 6, токоподводящих колец 7 и токосъемных щеток 8. Жесткое сочле нение вала двигателя с коллектором вращательного перемещения обеспечивается тягой 9. Статор 2, служащий для создания осевого перемещения под вилсного элемента, состоит из ряда стальных колец 10, между которыми ра полагается кольцевая обмотка с секци ями 11 {фиг. 4) и коммутация которой обеспечивается,, например, линейным электромеханическши: Коллектором, -в свою очередь состоящим из контактных колец 12 (количество которых определяется необходимой длиной осевого пе ремещения ротора и величиной коллекторного деления) , играющих, роль коллекторных пластин, коммутируквдих щеток 13 и тяги 14, обеспечивающей механическую связь коллектора линейного перемещения с валом машины. Обмотка 15 возбуждения создает общий для статора 1 и -2 магнитный поток возбуждения. Она выполняется в виде кольцевой-обмотки и располагается в пазу 16 между статором 1 и 2. Основной магнитный поток фц замыкается по корпусу 17 двигателя, черег магнитопроводы статоров линейного и вращательного перемещения.и подвижный элемент (ротор) двигателя. Вал машины Перемещается на подшипниках 18 ,по Hsf правляющим, вмонтированным в крышки 19 корпуса электродвигателя. Подвижный элемент (ротор) 3 (фиг. 2 ) машины выполнен из ферромагнитного материала и представляет из себя цилиндр, на котором размещены ферромагнитные полюсообразующие выступы 20, расположенные во внутренней расточке кольцевых поверхностей магнитопроводов статора 1 и 2, несущих якорные обмотки. Длина каждого из этих выступов вдоль продольной оси двигателя составляет половину активной длины статора 1 и 2 - Р/2. Наружная длина выступа в поперечном направлении составляет oi-Т , где-с - коэффициент расчетной полосной дуги. Ширина впадины 21 между выступами 20 равна (2 -ot) . Расстояние между внутренними поверхностями выступов 20, измеренное вдоль двигателя равно Р/2, т.е. аксиальной длине выступа. Высота выступов обеспечивает максимальное сцепление с магнитным потоком возбуждения с.татора, для чего ее выполняют равной (15+20) (Г, где сГ - односторонний воздушный зазор. Представленная схема - ра-звертка (фиг. 3) якорной обмотки обычной вращающийся машины постоянного тока ис- пользуется для вращательной части предлагаемого двигателя и укладнгвается в пазах магнитопровода статора 1 (фиг. 1). Показанная обмотка является, например, простой петлевой и выполнена на число пар полюсов равное двум (в общем случае число полюсов выбирается на этапе проектирования), Эта обмотка состоит из активных про«водников секций соответственно верхнего и нижнего слоев,,которые по известным схемам коммутации подключаются к электромеханическому коллектору вращательного движения, а, в частности к егсЭ коллекторным пластинам 5. Электромеханическая коммутация секций такой обмотки осуществляется с по- t мощью .контактных щеток 6 (фиг.1). Вроцесс коммутации происходит, как и в обычной машине постоянного тока, а конструкция коллекторного узла показана на фиг. 5. , Упрощенная схема кольцевой якорноя обмотки (фиг. 4) применяется для получения тягового усилия в продольн 4 направлении.-Обмотка состоит из кольцевых секций 11, каждая из которых имеет промаркированные концы: Н - начало; К - конец . По известной схеме, кольцевые секции обмотки подключаются к электромеханическому коллектору линейного перемещения, состоящему из коллекторных пластин (сплошных медных колец) 12 и коммутируются с помощью щеток 13 (фиг. 1). Представленная обмотка также выполнена (для примера) на число пар полюсов, равное двум. Схема коллекторного узла (фиг. 5) включает коллекторы линейного и вращательного движений. Линейный коллектор состоит из колец 12, коммутирующих щеток 13, жестко укрепленных ыа -Крльце из электроизоляционного мате-, риала,, которое с помощью тяги 14 жестко соединено с валом 3 двигателя. Длина коллектора LK предопределяется величиной хода подвижного элемента и может быть определена, как .LK Ьх к- где t) - коллекторное деление; п - число кольцевых секций; oL-ji,- величина хода. Последнее коллекторное кольцо показано оборванным в предположении во зможности необходимого удлинения линейного коллектора в соответствии с требующейся длиной хода. С этой цель кольца следующего цикла соответствен но электрически соединяются с кольца ми предыдущего цикла. Вращательный коллектор состоит- из коммутирующих щеток 6, токосъемочных щеток 8, жест ко связанных с несущим кольцом, укре пленном на шлицевой втулке 22 с помощью тяги 9. Шлицевая втулка может скользить в осевом направлении по . шлицевому валу 23, соединенному с ва лом двигателя. Длина шлифованной час ти вала где Lg, - осевой размер втулки; LУ - величина хода. Секции якорной обмотки вращательного движения подключаются к коллекторным пластинам 5. Питание к ним подводится токоподводящими кольцами 7. . . От осевого сдвига вращательную си стему удерживает с одной стороны кры шка 10J ас другой стороны - опорный .выступ, который предусмотрен из-за наличия незначительного трения в шли цевой паре. Механический узел (фиг. 6) состоит из шлипевой втулки 22 и шлицевого вала 23 и обеспечивает вра щательное движение коллектора вращательного перемещения за счет зацепле ния шлицов втулки и вала при кругово движении. При осевом движении подвиж ного элемента двигателя коммутирующие щетки вращательного коллектора остаются на месте из-за наличия рабочего зазора между шлицом вала и впадиной втулки. На шлицевом валу имеются шлицы и впадины. Аналогичная структура выполняется на поверхности внутренней этулки. Двигатель работает следукхцим образом. Пусть при возбужденной магнитной системе подали напряжение только на якорную обмотку линейной части и по движный элемент (ротор) начал смещаться слева направо. Тогда щетки 13 придут в движение за счет жесткого соединения с тягой 14, валом машины и начнут коммутировать секции кольцевой обмотки для того, чтобы создаваемое усилие было однонаправленньм. Токоподвод к щеткам 13 осуществляется с помощью гибкого электрического соединения (не показан) с токосъемными щетками. При этом поворотная часть коллекторного узла останется на мес-. те из-за наличия шлицевого соединения между валом двигателя и коммути- . руняцей системой. После обесточивания линейной системы подадим напряжение со щеток В на коммутирующие щетки 6 поворотной части. Вал двигателя придет во вращение, но так как линейная часть коллекторного узла выполнена из колец, то ее исходное состояние неизменно. Вращение обеспечено шли-. цовым зацеплением поворотной части и жестким соединением линейной части. Таким образом, работа одной половины коллекторного узла не оказывает влияния на состояние другой его части. Силы, перемещающие ротор в линейном и вращательном направлениях, возникают в соответствии с законом БирСавара-Лапласа, и в зависимости от соотношения сил в указанных направлениях (при работе обеих систем) появляется возможность электрического управления величиной шага винтового перемещения подвижного элемента. Предлагаемая конструкция двигателя обеспечивает практически неогра-. ниченные (без учета механических особенностей) пределы перемещения подвижного элемента, позволяет в широких пределах регулировать скорость движения, увеличивать равномерность . мещения значительно упрощает конструкцию по сравнению с известной. Формула изобретения Электрический .двигатель, содержащий магнитопровод статора, несущий обмотки вращательного и поступательного перемещения, установленные одна за другой в аксиальном направлении, и ферромагнитный ротор, о т л и ч аю щ и и с я тем, ч.то, с целью упрощения конструкции, и расширения функциональных возможностей, двигатель снабжен цилиндрическим электромеханическим коллектором и линейным электромеханическим коллектором, между обмотками вращательного и поступательного перемещения выполнен кольцевой паз, в котором размещена обмотка возбуждения, а ротор имеет ферромагнитные выступы, размещенные в осевом направлении на расстоянии 2/2 и имеющие длину в этом направлении, равную 6/2, при этом ширина выступов, измеряемая по внешней окружности, равна о.Т и расстояние между ними |в направлении вращения равно (2-oi)-2f ,
где 6 - расчетная длина статора, занимаемая как обмоткой вращательного перемещения, так и обмоткой поступательного перемещения;
f - полюсное деление обмотки, обеспечивающей вращательное перемещение,Источники информации, принятые во внимание при экспертизе
1. Ивоботенко Б.А. и др.
Пути
построения оптимальных шаговых элект роприводов поступательного действия . Труды МЭИ, вып. 220, 1975.
2. Авторское свидетельство СССР 15 по заявке № 27Д9101, кл. Н 02 К 41/02, 1979.
СЭа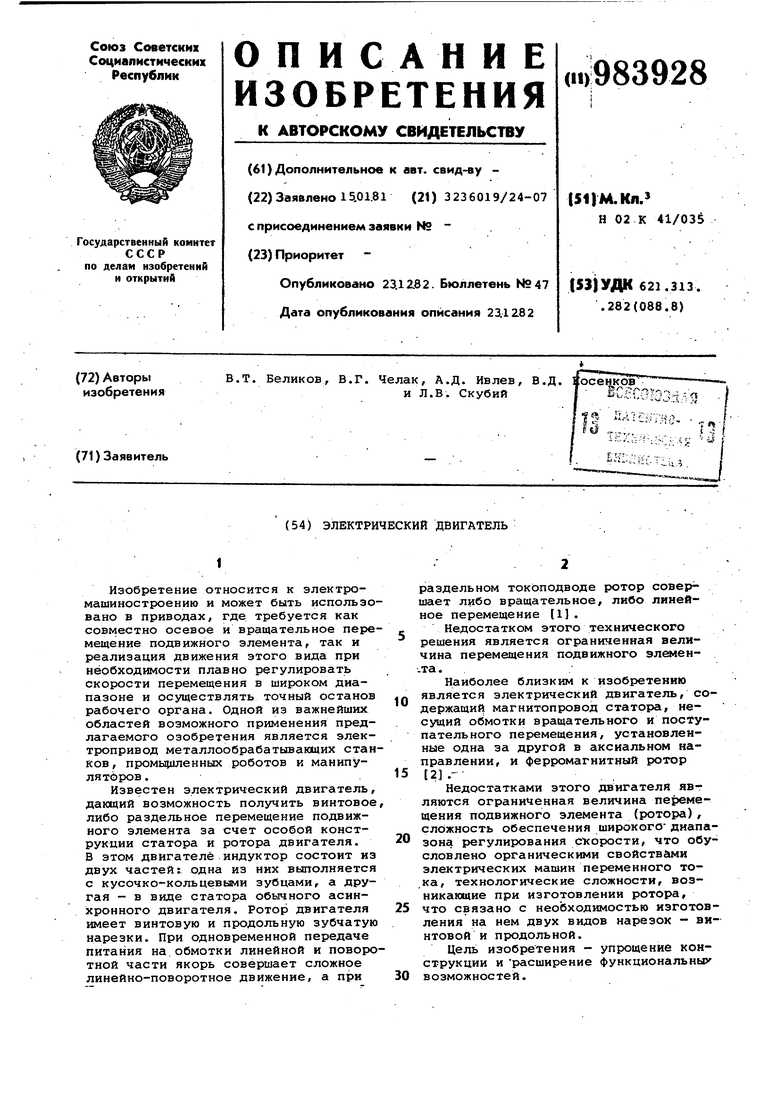


| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель постоянного тока | 1980 |
|
SU928554A1 |
| Электрический двигатель постоянного тока | 1980 |
|
SU985894A1 |
| Электрический двигатель постоянного тока | 1979 |
|
SU919023A1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286642C2 |
| Линейный электродвигатель "Бимарпол | 1978 |
|
SU942217A1 |
| Линейный электрический двигатель | 1978 |
|
SU1037386A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
| ТОРЦОВЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286643C2 |
| Линейный двигатель постоянного тока | 1979 |
|
SU1037387A1 |
23
