Изобретение относится к области электрических машин, в частности к бесколлекторным двигателям с питанием от источников постоянного напряжения.
Бесколлекторные двигатели предполагают исполнение ротора в виде монополюсной системы постоянных магнитов, при этом якорные обмотки располагаются на статоре, что позволяет исключить из конструкции двигателя малонадежный коллекторно-щеточный узел.
Для обеспечения однонаправленности вращающего момента используют блок управления, обеспечивающий перекоммутацию токов в якорных обмотках в зависимости от пополнения магнитов ротора. Переключение режимов якорных обмоток осуществляется по сигналам, поступающим от датчиков положения ротора, которые формируют информацию о взаимном положении ротора и статора. В качестве информативного фактора используются эффекты взаимодействия электромагнитных полей, существующих в объеме пространства между статором и ротором, с чувствительными элементами, расположенными на статоре.
Наиболее часто для этих целей используются оптикоэлектронные, индукционные, индуктивные и емкостные датчики, а также датчики, основанные на использовании эффекта Холла. Из этих датчиков наиболее информативными являются датчики Холла, индуктивные и емкостные датчики, так как они вырабатывают непрерывную информацию о взаимном положении статоров и ротора. Уровень сигнала, вырабатываемого этими датчиками, не зависит от текущего значения скорости вращения ротора.
Каждая разновидность этих датчиков имеет свои преимущества и недостатки.
Емкостные датчики наиболее просты по конструкции, но их трудно реализовать в малогабаритных двигателях. Использование элементов Холла приводит к усложнению конструктивного построения датчика. В этом отношении наиболее предпочтительными являются индуктивные датчики.
В настоящее время известен широкий круг таких датчиков, параметры и конструктивное оформление которых варьируется в зависимости от требований, предъявляемых к конкретному типу двигателей.
Индуктивные датчики, вырабатывающие непрерывную информацию о взаимном положении статора и ротора, относятся к аналоговым. Индуктивные датчики обычно реализуются в виде бесконтактных вращающихся трансформаторов или датчиков микросинного типа [1, 2]. В качестве примера можно привести датчик, используемый в изобретении а. с. 1350773, H 02 K 29/06. Недостатком подобных датчиков является их относительно большая конструктивная сложность, что приводит к снижению надежности и повышению стоимости изделия. Наиболее близким к рассматриваемому предложению является датчик, используемый в изобретении по а.с. 1661929 России, H 02 K 29/12.
В этом изобретении в качестве чувствительных элементов (ЧЭ) датчика положения ротора используются секции якорных обмоток, расположенных на статоре. При перемещении индукторов, размещенных на роторе и выполненных в виде полюсов из ферромагнитных материалов с различной магнитной проницаемостью, относительно статора меняется индуктивность якорных обмоток. Токи, протекающие в якорных обмотках, имеют две составляющие - низкочастотную, формируемую коммутатором по сигналам датчика положения, и высокочастотную от генератора гармонических колебаний, при этом в цепи питания высокочастотной составляющей образованы последовательные резонансные контуры путем подключения генератора к якорным обмоткам, что осуществляется через конденсаторы.
Изменение индуктивности якорных обмоток вызывает изменение частоты настройки резонансного контура. При совпадении частоты настройки контура с частотой генератора гармонических колебаний происходит нарастание высокочастотной составляющей тока в якорных обмотках. Этот эффект и используется для формирования информационного сигнала о взаимном положении статора и ротора.
Таким образом, якорные обмотки двигателя совмещают две функции: за счет взаимодействия тока якоря с магнитным полем ротора формируется электромагнитный момент двигателя, и в то же время они используются как элемент датчика положения ротора.
Подобное решение позволяет несколько упростить конструкцию блока управления коммутаций якорных обмоток двигателя за счет сокращения числа элементов датчика положения ротора. В то же время индуктивный датчик положения ротора, используемый в этом решении, не лишен ряда недостатков, ограничивающих возможности его применения.
Существенным недостатком подобного решения является необходимость индивидуальной подстройки контуров на резонанс, которая обеспечивается за счет подбора конденсаторов. Это практически исключает возможность реализации двигателя по предполагаемой схеме в случае необходимости его изготовления в крупносерийном производстве.
К недостаткам можно отнести и отсутствие связи между уровнем сигнала датчика положения ротора и угловым рассогласованием между статором и ротором во всем диапазоне углов. Этот фактор особенно важен при построении двигателей с управляемой механической характеристикой.
Достаточно высокое энергопотребление датчика положения от генератора гармонических колебаний на частоте резонанса также является его недостатком. На частоте резонанса сопротивление последовательного контура минимально и достаточный уровень сигнала можно получить только за счет увеличения тока, потребляемого от генератора.
Целью предлагаемого решения является устранение указанных недостатков и построение универсального датчика положения, которым можно было бы комплектовать бесколлекторные двигатели различного назначения в широком диапазоне разброса требований, предъявляемых к ним.
Поставленная цель достигается тем, что индуктивный датчик положения ротора, содержащий индуктор, выполненный в виде чередующихся полюсов, установленных на роторе бесколлекторного двигателя, чувствительные элементы в виде резонансных контуров, образованных катушками индуктивности и конденсаторами, генератор гармонических колебаний и блок формирования сигналов, отличается тем, что он выполнен в виде не связанного с якорными обмотками узла, в котором чередующиеся полюса индуктора по числу полюсов ротора бесколлекторного двигателя выполнены, соответственно, из магнитомягкого ферромагнитного материала (например, феррита) и немагнитного материала с высокой электропроводностью (например, меди) и размещены на носителе (цилиндрической пластине), выполненном из немагнитного материала, причем полюса из разнородных материалов размещены на носителе диаметрально противоположно.
Чувствительные элементы по числу якорных обмоток двигателя выполнены в виде двух последовательно соединенных параллельных резонансных контуров, образованных индуктивностями и конденсаторами, причем каждая индуктивность выполнена в виде плоской катушки. Каждая из пары катушек чувствительного элемента зашунтирована конденсатором и размещена диаметрально противоположно относительно другой на стенке корпуса индуктивного датчика положения ротора.
Первые выходы чувствительных элементов подключены к первым входам блока формирования информационных сигналов и через резисторы - к выходу генератора гармонических колебаний, вторые выходы чувствительных элементов подключены ко вторым входам блока формирования информационных сигналов и через резисторы - к выходу генератора гармонических колебаний, средние точки соединений резонансных контуров всех чувствительных элементов объединены и подключены к общей шине индуктивного датчика.
В блок формирования информационных сигналов дополнительно введены сумматоры, причем первые входы блока формирования информационных сигналов через детекторы подключены к инвертирующим входам сумматоров, а вторые входы блока формирования информационных сигналов подключены к неинвертирующим входам сумматоров. Выходы сумматоров подключены к выходам блока формирования информационных сигналов.
Работа устройства поясняется чертежами на фиг. 1, 2, 3, 4, 5.
На фиг. 1 приведена функциональная схема индуктивного датчика для варианта с двухфазной якорной обмоткой.
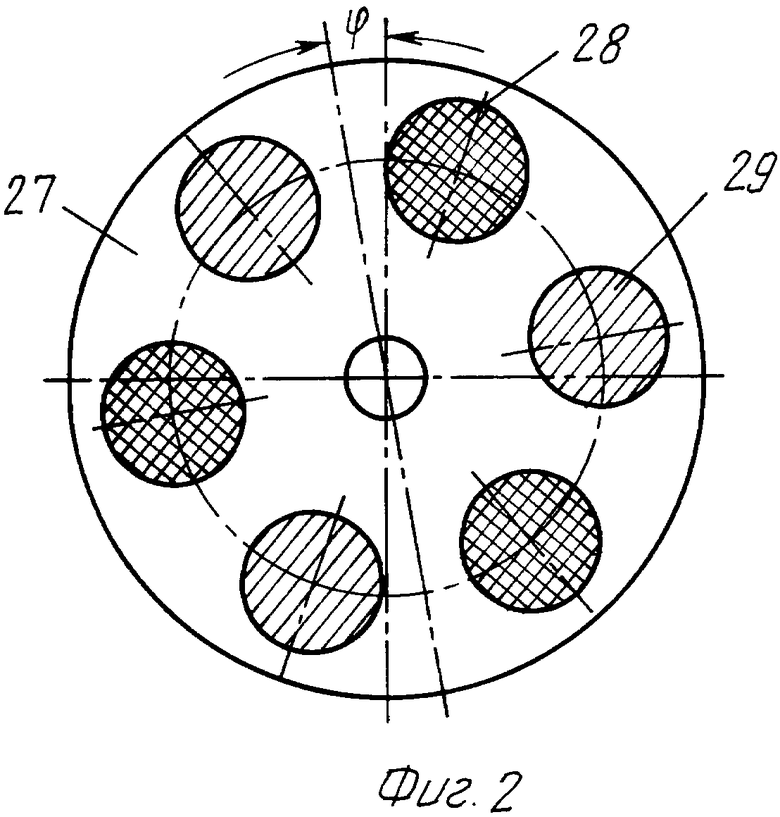
На фиг. 2 приведен вариант исполнения индуктора торцевого исполнения, при наличии на роторе 3-х пар полюсов.
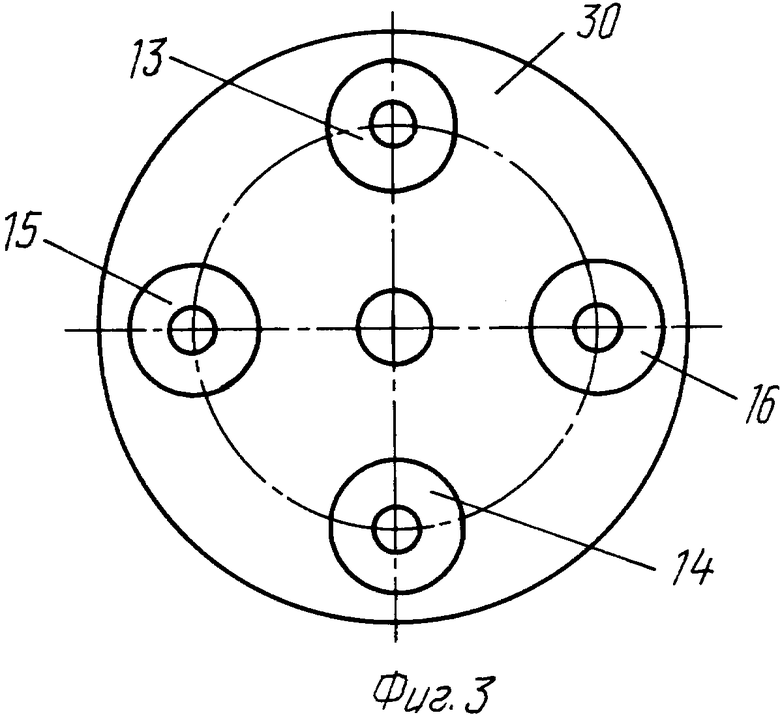
На фиг. 3 приведен вариант установки катушек чувствительных элементов при использовании двухфазной якорной обмотки.
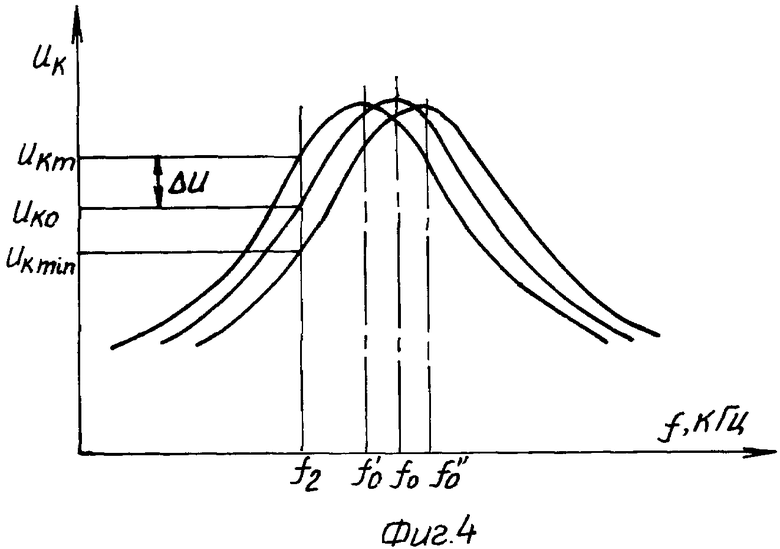
На фиг. 4 приведены амплитудно-частотные характеристики резонансного контура ЧЭ для ряда значений индуктивности катушек ЧЭ.
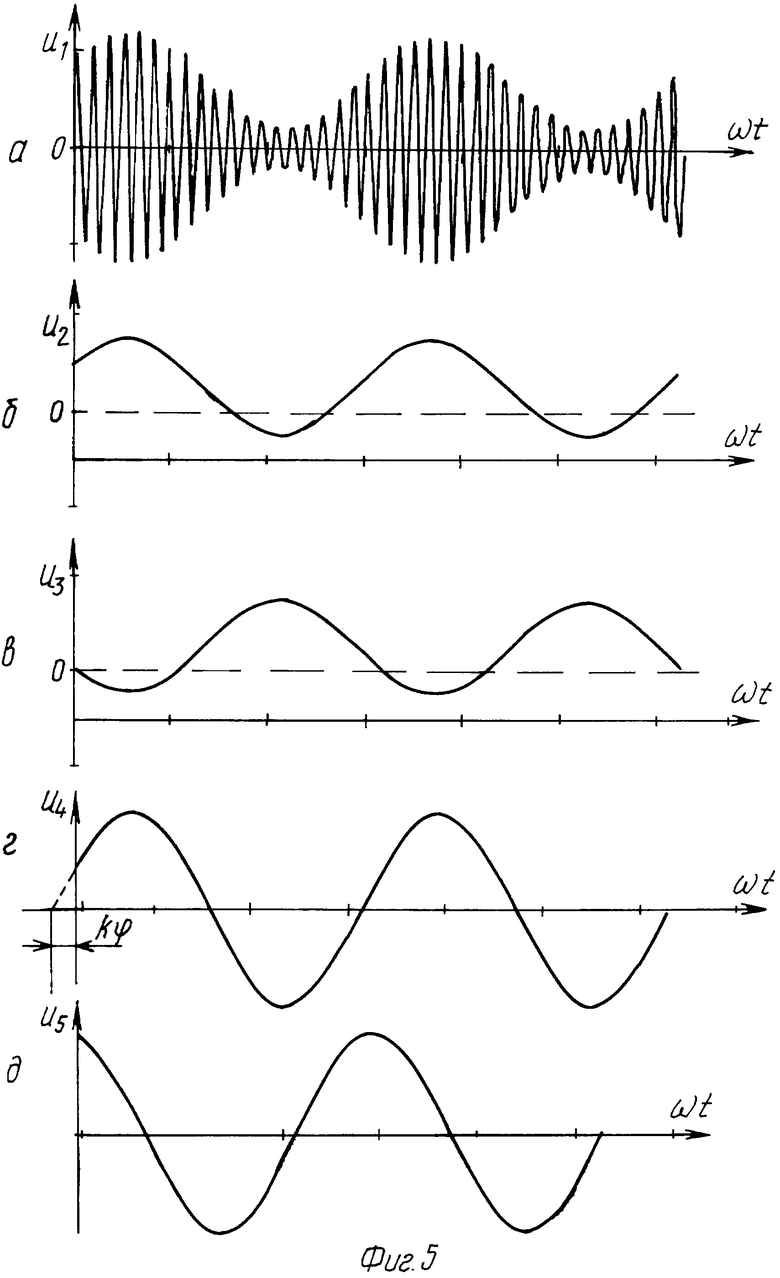
На фиг. 5 приведены временные диаграммы напряжений на элементах индуктивного датчика и его выходе.
Работа индуктивных неконтактных датчиков, которые составляют суть рассматриваемого предложения, основана на использовании эффектов изменения индуктивности катушек чувствительного элемента, если в область его реагирования вносятся объекты, взаимодействующие с магнитным полем чувствительного элемента.
Появление в области реагирования ферромагнитных материалов вызывает увеличение индуктивности ЧЭ, наоборот появление в области реагирования ЧЭ, питаемого от генератора повышенной частоты, материалов с высокой электропроводностью снижает индуктивность ЧЭ, за счет размагничивающего действия вихревых токов, наведенных в материале индуктора.
При вращении индуктора, содержащего чередующиеся полюса, выполненные из подобных материалов и воздействующих поочередно на ЧЭ достигается эффект изменения индуктивности катушек, переменная составляющая которой близка к синусоидальному закону, при этом эти эффекты определяются угловым рассогласованием положения полюсов индуктора относительно катушек индуктивности ЧЭ, размещенных на статоре датчика углового положения ротора.
Индуктивный датчик положения ротора (фиг. 1) содержит: генератор гармонических колебаний 1, чувствительные элементы 2 и 3, по числу фаз якорной обмотки бесколлекторного двигателя, блок формирования информационных сигналов 4 и резисторы 5, 6, 7, 8.
Чувствительный элемент 2 состоит из двух последовательно соединенных резонансных контуров 9 и 10, включающих соответственно индуктивности 13, 14 и конденсаторы 17, 18. Первый и второй выходы ЧЭ 2 имеют соответственно обозначения 31 и 32.
Чувствительный элемент 3 состоит из двух последовательно соединенных резонансных контуров 11 и 12, включающих индуктивности 15 и 16, а также конденсаторы 19, 20. Первый и второй выходы ЧЭ 3 обозначены соответственно 33 и 34.
Блок формирования информационных сигналов содержит детекторы 21, 22, 23, 24 и сумматоры 25, 26.
Для суммирования эффектов изменения индуктивности катушек 13 и 14 ЧЭ 2, а также катушек 15 и 16 ЧЭ 3 они расположены диаметрально противоположно относительно поперечной оси носителя чувствительного элемента, при этом индуктор выполнен таким образом, чтобы в этих же точках располагались полюса, выполненные из разнородных материалов. Таким образом, в каждый момент времени одна катушка конкретного ЧЭ взаимодействует, например, с ферромагнитным полюсом, а вторая - с полюсом, выполненным из диамагнитного материала.
Индуктор (фиг. 2) содержит три пары полюсов, где носитель 27 изготовлен в виде цилиндрической пластины, установленной на оси ротора бесколлекторного двигателя и выполненной из немагнитного материала (пластмассы, алюминия). На пластине носителя 27 закреплены ферромагнитные полюса 28 и диамагнитные полюса 29.
Блоки и элементы индуктивного датчика положения устанавливаются в его немагнитном корпусе 30, на торцевой стенке которого (фиг. 3) закрепляются катушки 13 и 14 первого чувствительного элемента 2 и катушки 15 и 16 второго чувствительного элемента 3.
Выходные зажимы ЧЭ 2 и 3 через резисторы 5, 6, 7 и 8 подключены к генератору гармонических колебаний 1, образуя тем самым делители напряжения. Величина сопротивления резистора выбирается на порядок большей, чем резонансное сопротивление контура, что практически обеспечивает неизменность тока, питающего делитель.
Для увеличения крутизны преобразования изменения величины индуктивности в электрический сигнал катушки индуктивности 13, 14. 15 и 16 зашунтированы конденсаторами 17, 18, 19 и 20, образуя при этом резонансные контуры, работающие в режиме резонанса токов.
Это позволяет при малом омическом сопротивлении катушек ЧЭ реализовать контур с высокой добротностью, а следовательно, получить высокое эквивалентное сопротивления контура на частотах, близких к резонансу.
Величина емкости конденсаторов выбирается таким образом, чтобы резонансная частота контура ЧЭ отличалась от частоты генератора гармонических колебаний f2 на величину  где Q добротность резонансного контура. В этом случае частота генератора гармонических колебаний совпадает с частотой, соответствующей границе полосы пропускания резонансного контура. При изменении частоты настройки резонансного контура
где Q добротность резонансного контура. В этом случае частота генератора гармонических колебаний совпадает с частотой, соответствующей границе полосы пропускания резонансного контура. При изменении частоты настройки резонансного контура  вследствие изменения индуктивности ЧЭ при воздействии на него полюсов индуктора, рабочая тоска смещается по резонансной кривой фиг. 4, а следовательно, меняется напряжение, снимаемое с резонансного контура.
вследствие изменения индуктивности ЧЭ при воздействии на него полюсов индуктора, рабочая тоска смещается по резонансной кривой фиг. 4, а следовательно, меняется напряжение, снимаемое с резонансного контура.
Выбор начального положения рабочей точки обусловлен следующими причинами.
Резонансная кривая на границе полосы пропускания характеризуется наиболее высокой крутизной преобразования  и ее линейностью, что немаловажно с точки зрения построения преобразователя.
и ее линейностью, что немаловажно с точки зрения построения преобразователя.
Вторым важным достоинством такого выбора рабочей точки является отсутствие жестких требований к параметрам индуктивности и емкости, входящих в резонансный контур. Например, десятипроцентный разброс параметров индуктивности приводит к изменению частоты настройки контура примерно на 5%
Разброс начальных параметров элементов резонансного контура в пределах ±5% приводит при добротностях Q=5-10 и f=200 кГц к его начальной расстройке в пределах 1--2 кГц, что не приводит к ее уходу за пределы линейного участка. Это позволяет исключить операции настройки контуров, если комплектующие элементы подбираются с допустимым разбросом исходных параметров. Эти возможности очень важны при серийном производстве датчиков положения. Диапазон рабочих частот генератора выбирается из следующих, соображений.
При взаимодействии катушки с проводящим полюсом индуктора изменение индуктивности определяется размагничивающим действием токов, протекающих в материале полюса, причем степень этого взаимодействия зависит от многих факторов, но в первую очередь от частоты питающего катушку напряжения и от воздушного зазора между катушкой и полюсом.
С увеличением частоты степень этого взаимодействия увеличивается, но одновременно увеличиваются и потери. Поэтому существует вполне определенный диапазон частот, когда вносимая отрицательная индуктивность максимальна. Учитывая реальные величины зазора, возможный диапазон рабочих частот ориентировочно выбирается в диапазоне 100-500 кГц.
Как показали эксперименты на частотах 150-200 кГц приращение индуктивности, вызванное влиянием ферритового полюса, примерно равно уменьшению индуктивности из-за размагничивающего действия медного полюса, поэтому эти частоты и можно рекомендовать при выборе рабочей частоты генератора гармонических колебаний. Использование параллельного резонансного контура позволяет существенно снизить энергопотребление датчика от генератора гармонических колебаний, его сопротивление на частоте резонанса, определяемое из соотношения Rконтура=Qr 2, где r - сопротивление катушки, имеет порядок 1 кОм. При этом достигается высокий уровень сигнала, снимаемого с делителей. Сигнал с делителей напряжения поступает на входы блока сформирования информационных сигналов 4, где с помощью детекторов 21, 22, 23, 24 осуществляется демодуляция высокочастотного сигнала.
В сумматорах 25, 26, выполненных на базе операционного усилителя, осуществляется операция вычитания сигналов, поступающих по входу 1 и по входу 2 формирователя информационных сигналов 4. В результате на выходе сумматора 25 формируется синусоидальный сигнал, мгновенное значение которого пропорционально угловому рассогласованию поперечных осей ротора и статора. На выходе сумматора 26 формируется сигнал, пропорциональный косинусу угла рассогласования.
Индуктивный датчик работает следующим образом. При вращении ротора и связанной с ним пластины индуктора происходит изменение взаимного положения катушек ЧЭ и полюсов индуктора. В те моменты, когда ферромагнитный полюс 14 располагается под катушкой, ее индуктивность максимальна. Наоборот, в моменты, когда под катушкой располагается полюс 15 из диамагнитного материала с высокой электропроводностью, индуктивность катушки уменьшается против своего начального значения за счет размагничивающего действия вихревых токов. При вращении ротора в промежуточных точках величина индуктивности увеличивается или уменьшается, принимая некоторые промежуточные значения между максимальным и минимальным значением.
Сигнал гармонических колебаний с генератора 1 (фиг. 1) поступает на делители напряжения, образованные последовательно включенными резисторами 5, 6, 7, 8 и резонансными контурами 9, 10, 11 и 12, состоящими из параллельно включенных конденсаторов 17, 18, 19, 20 и катушек индуктивности 13, 14 ЧЭ 2, а также катушек индуктивности 15, 16 ЧЭ 3. Изменение индуктивности катушек ЧЭ вызывает изменение частоты настройки резонансного контура, а следовательно, смещение рабочей точки на рабочей характеристике резонансного контура, сопровождаемое изменением амплитуды высокочастотного сигнала, снимаемого с контура (фиг 4).
Временная диаграмма амплитудно-модулированного сигнала на выходе 1 чувствительного элемента 9 представлена на фиг. 5а. Этот сигнал поступает на вход блока формирования информационных сигналов 4 и после детектирования на детекторе 21 приобретает вид U2, изображенный на фиг. 56. Аналогично формируется сигнал, изображенный на фиг. 5в, из сигнала, поступающего по входу 2 блока формирователя информационных сигналов 4. Низкочастотные сигналы U2 и U3 поступают на сумматор 25, на выходе которого формируется выходной сигнал индуктивного датчика U4=-K(U3-U2), где K - коэффициент усиления сумматора. Этот сигнал (фиг. 5г) предназначен для управления режимами синусной якорной обмоткой бесколлекторного двигателя. Использование сумматора позволяет решить две задачи:
1. Устранить постоянную составляющую, присутствующую в сигнале U2 и U3.
2. Симметрировать амплитуды положительной и отрицательной полярности
Аналитически выходной сигнал U4 можно описать с помощью уравнения
U4=Umsin kϕ,
где ϕ - угол рассогласования между поперечной осью платы индукторов и поперечной осью платы-носителя катушек чувствительного элемента, k - количество пар полюсов, расположенных на роторе двигателя.
Формирование управляющих сигналов для второй якорной обмотки осуществляется аналогично с использованием в чувствительном элементе 3 катушек индуктивности 15 и 16. В этом случае сигнал на выходе сумматора 26 описывается уравнением U4=Umcos kϕ (фиг. 5д).
Исследования, проведенные с образцами индуктивных датчиков, показали, что коэффициент высших гармоник в выходном сигнале не превышает 5%, что обеспечивает возможность эффективного его использования в двигателях с управляемой механической характеристикой и обеспечивает непрерывную информацию об угловых смещениях ротора относительно статора.
Индуктивный датчик не требует индивидуальной настройки и универсален, т. е. один и тот же датчик может быть использован для целой серии бесколлекторных двигателей, отличающихся габаритами мощностью и другими конструктивными особенностями.
Возможно использование индуктивного датчика и по прямому назначению, как датчика угла в системах, где требования по точности работы датчика не превышают 1o.
Анализ имеющейся технической информации показал, что на данный момент не известно аналогичное решение с приведенным составом отличительных признаков (блоков и связей между ними). Это позволяет сделать вывод о соответствии материалов заявки критерию новизны технического решения задач.
Источники информации
1. В. Д. Косулин. Г.Б. Михайлов и др. Вентильные электродвигатели малой мощности для промышленных роботов. Л.: Энергоиздат, 1988 г.
2. И. Е. Овчинников, Н. И. Лебедев. Бесконтактные двигатели постоянного тока. Л.: Наука, 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СТАРТЕР-ГЕНЕРАТОР С ВОЗМОЖНОСТЬЮ САМОДИАГНОСТИКИ | 2016 |
|
RU2654209C2 |
| СПОСОБ ОБРАБОТКИ ЖИДКОСТЕЙ ПЕРЕМЕННЫМ ЭЛЕКТРОМАГНИТНЫМ ПОЛЕМ | 2018 |
|
RU2701926C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| СИСТЕМА ЭЛЕКТРОННОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2018 |
|
RU2674993C1 |
| ЭЛЕКТРОБУР ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН (ВАРИАНТЫ) | 2003 |
|
RU2321717C1 |
| Вентильный электродвигатель | 1983 |
|
SU1141527A1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| ЭЛЕКТРОРЕЗОНАНСНЫЙ ПРИВОД | 2005 |
|
RU2310264C2 |
| Датчик угловой скорости вращения вала | 1980 |
|
SU993125A2 |
Использование: для построения схем управления двигателей постоянного тока и в качестве датчика угла систем ориентации. Технический результат заключается в точности формирования непрерывной информации об угловом рассогласовании статора и ротора двигателей с управляемой механической характеристикой. В качестве индуктора используется связанный с ротором двигателя носитель, на котором закреплены чередующиеся полюса из магнитомягкого ферромагнетика и диамагнетика с высокой электропроводностью. В качестве чувствительного элемента используется параллельный резонансный контур, питаемый от генератора гармонических колебаний. Перемещение полюсов индуктора относительно катушек резонансного контура приводит к изменению частоты настройки контура. На выходе чувствительного элемента формируется амплитудно-модулированный синусоидальный сигнал за счет соответствующего выбора начальной настройки резонансного контура. Частота генератора гармонических колебаний и частота настройки резонансного контура смещены относительно друг друга таким образом, чтобы частота генератора совпадала с линейным участком резонансной характеристики контура, примыкающим к границе его полосы пропускания. Выбор ее ширины снижает требования к разбросу начальных параметров индуктивностей и емкостей указанного контура и исключает необходимость его настройки. Рабочая частота указанного генератора выбирается таким образом, чтобы приращение величины индуктивности при воздействии ферромагнетика имело те же значения, что и уменьшение ее из-за воздействия диамагнитного проводящего материала. Дифференциальная обработка сигналов, поступающих с противоположных плеч чувствительного элемента через детекторы на сумматоры, на их выходе формирует синусоидальный сигнал, привязанный к угловому рассогласованию осей статора и ротора двигателя. 1 з.п. ф-лы, 5 ил.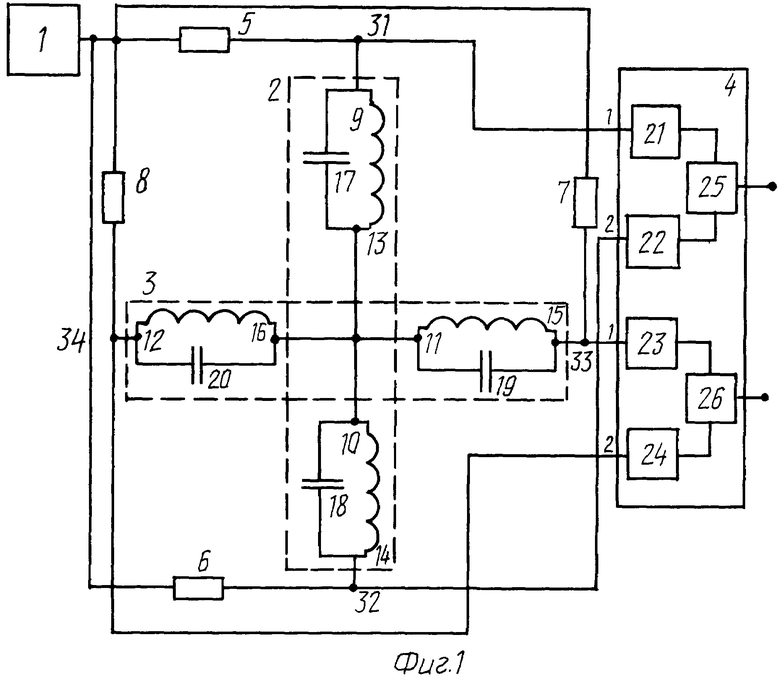

где f2 - частота генератора гармонических колебаний;
Q - добротность резонансного контура.
| Вентильный электродвигатель | 1989 |
|
SU1661929A1 |
| Вентильный электродвигатель | 1984 |
|
SU1350773A1 |
| SU 13500774 A1, 07.11.1987 | |||
| ДЕ 4120023 С1, 13.08.1992 | |||
| Косулин В.Д., Михайлов Г.Б | |||
| и др | |||
| Вентильные электродвигатели малой мощности для промышленных роботов | |||
| - Л.: Энергоиздат, 1988 | |||
| Овчинников И.Е., Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока, - Л.: Наука, 1973. | |||
