Изобретение относится к горному делу, а именно к средствам меканиза- дии выемки тонких и весьма тонких пластов полезных ископемых.
Целью изобретения является повышение наделсности работы выемочного агрегата путем исключения зажатия завальных полусекдий при передвижке.
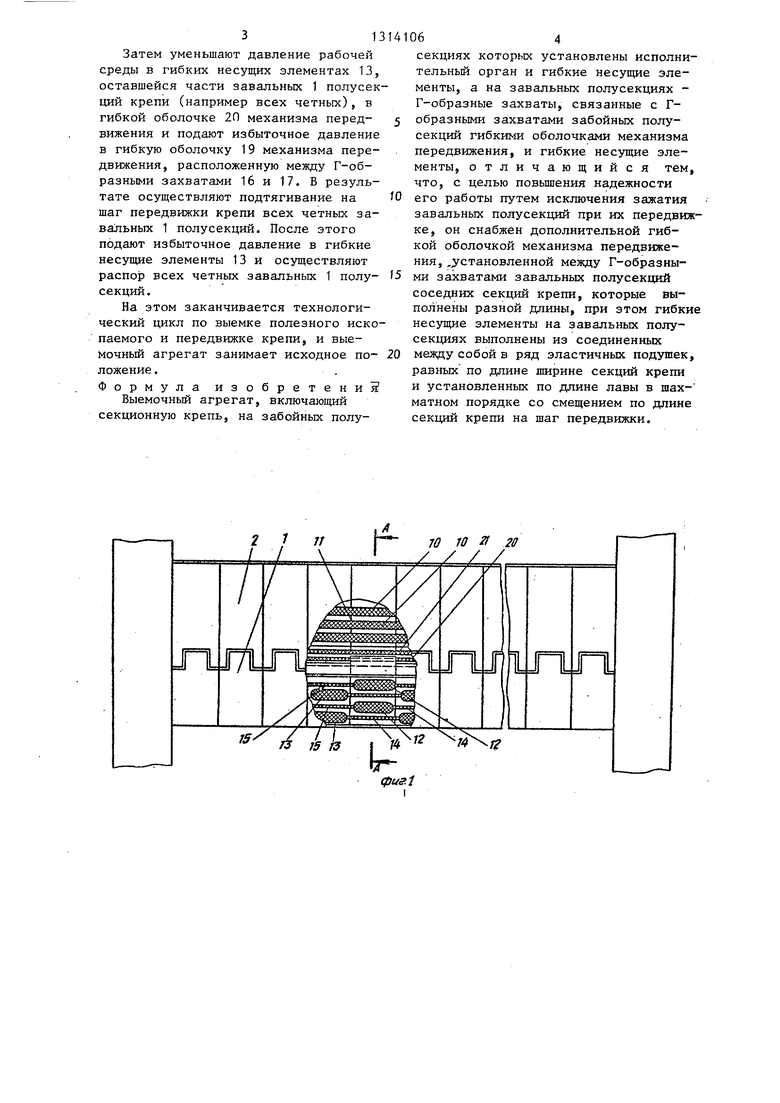
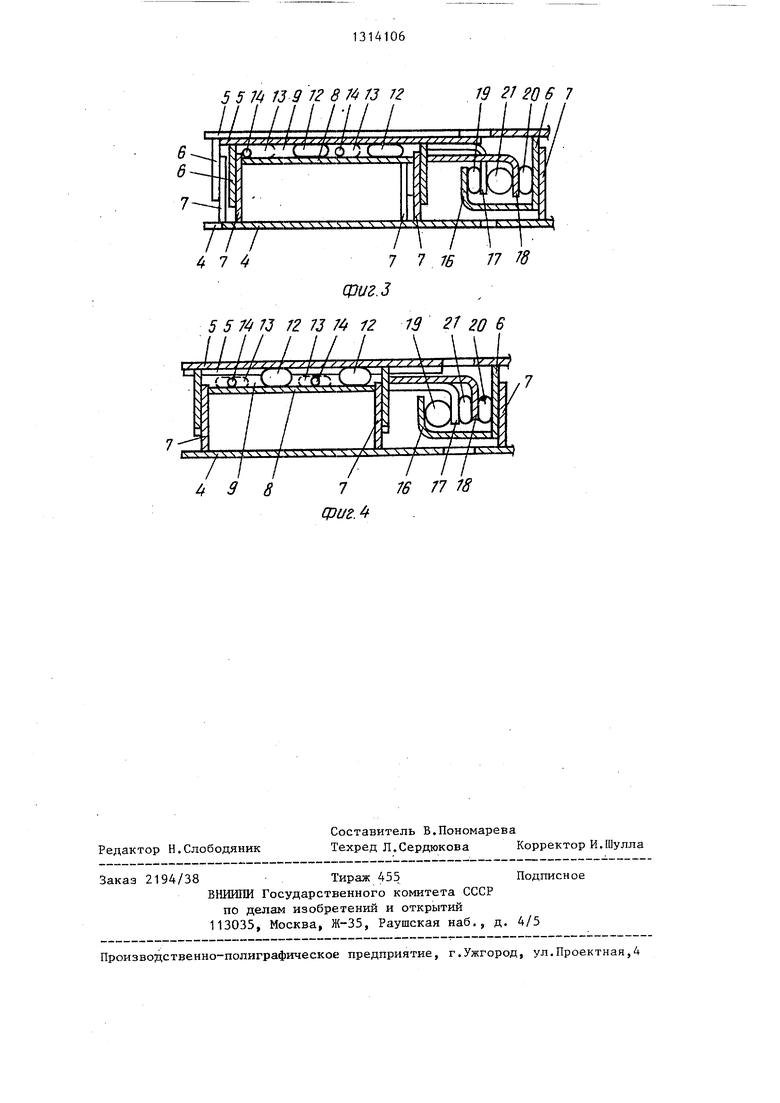
На фиг,1 изображен выемочный аг- регат, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - завальные полусекции крепи, подтянутые к забойным полусекциям после выемки угля на шаг передвижки крепи, продоль- ньш разрез; на фиг.4 - то же, после подтягивания остальной части завальных полусекций.
Выемочньй агрегат включает передвижную секционную к репь, состояя ую из завальных 1 и- забойных 2 полусекций и исполнительного органа 3 (в качестве примера показан скреперо- струг).
Завальные 1 и забойные 2 полусекции передвижной крепи состоят из основания 4 и верхняка 5. На основания 4 и верхняках 5 завальных 1 и забойных 2 полусекций жестко закреплены направляющие 6 и 7, которые могут телескопически перемещаться относительно друг друга. Между направляющими 7 также жестко закреплены перемычки 8, образующие совместно, с вер- хняками 5 полости 9. В полостях 9 забойных 2 полусекций.размещены гибкие несущие элементы 10 и 11, выполненные, например, в виде протянутых по всей длине лавы резинотканевых рукавов. В полостях 9 зав.альных 1 полусекций установлены гибкие несущие элементы 12 и 13, выполненные, например, в виде,эластичных подушек соединенных напорными магистралями 14 и 15 и установленных по длине лавы в шахматном порядке со смещением по длине секций на шаг передвижки, при этом длина эластичных подушек равна шфине секций крепи.
Задние направляющие 6 забойных 2 полусекций крепи снабжены Г-образны- ми захватами 16, а завалыше полусекции крепи 1 - Г-образными захватами 17 и 18. При этом Г-образные захваты 17 и 18 завальных полусекций соседних секций крепи 1 выполнегш разновеликими по длине. В качестве примера показано, что Г-образныв захваты
17 имеют меньшую длину по сравнению с Г-образными захватами 18 соседних секций крепи.
Между задними направляющими 6 забойных 2 полусекций крепи и Г-образными захвата чи 16 и 17 размещены гибкие оболочки 19, 20, дополнительная гибкая оболочка 21 механизма передвилсения установлена между Г-образными захватами 17 и 18 завальньк полусекций крепи.
Выемочный агрегат работает следующим образом.
В исходном положении перед подачей забойных 2 полусекций крепи на забой их гибкие несущие элементы 10 , наполнены рабочей средой (например, воздухом). Завальные 1 полусекции подтянуты к забойным 2 полусекциям. При. этом гибкие несущие элементы 12 и 13 заполнены рабочей средой. Рабочей средой заполнена также гибкая оболочка 19 механизма передвижения. В гибких оболочках 20 и 21. при работе выемочного агрегата рабочая среда отсутствует.
Для подачи забойных 2 полусекций на забой снимают или уменьшают давление в гибких несущих элементах 10, а также в гибкой оболочке 19 механизма передвижения. Одновременно подают избыточное давление в гибкую оболочку 20 механизма передвижения. В результате забойные 2 полусекции крепи перемещаются к забою на шаг передвижки крепи, а при их взаимодействии с исполнительным органом 3 осуществля- ется выемка полезного ископаемого.
После передвилски забойных 2 полу- секций на шаг передвижки крепи в их гибкие несущие элементы 10 подают избыточное давление и осуществляют распор забойных полусекций. Одновременно уменьшают давление в гибких несущих элементах 12 части завальных 1 полусекций крепи -(например во всех нечетных), гибкой оболочке 20 механизма передвижения и подают избыточное давление в гибкую 21 механизма передвижения, размещенную меясду Г-образными захватами 17 и 18. При этом осуществляют подтягивание части,завальных 1 полусекций (напри- мер, всех нечетных), после чего в их гибкие несущие элементы 12 подают избыточное давление и осуществляют распор передвинутых завальных 1 по-- лусекций.
Затем уменьшают давление рабочей среды в гибких несущих элементах 13, оставшейся части завальных 1 полусекций крепи (например всех четных), в гибкой оболочке 2П механизма передвижения и подают избыточное давление в гибкую оболочку 19 механизма передвижения, расположенную между Г-об- разными захватами 16 и 17. В результате осуществляют подтягивание на шаг передвижки крепи всех четных завальных 1 полусекцнй. После этого подают избыточное давление в гибкие несущие элементы 13 и осуществляют
секциях KOTopbtx установлены исполни- тельньй орган и гибкие несущие элементы, а на завальных полусекциях - Г-образные захваты, связанные с Г- 5 образными захватами забойных полусекций гибкими оболочками механизма передвижения, и гибкие несущие элементы, отличающийся тем,
что, с целью повьшения надежности W его работы путем исключения зажатия завальных полусекций при юс передвижке, он снабжен дополнительной гибкой оболочкой механизма передвижения, установленной между Г-образны- распор всех четных завальных 1 полу- 5 ми захватами завальных полусекций секций.соседних секций крепи, которые выНа этом заканчивается технологи- полнены разной длины, при этом гибкие ческий цикл по выемке полезного иске- несущие элементы на завальных полу- паемого и передвижке крепи, и вые- секциях выполнены из соединенных мочный агрегат занимает исходное по- 20 между собой в ряд эластичных подушек, ложение.- равных по длине ширине секций крепи
Формула изобретений и установленных по длине лавы в шах-Выемочный агрегат, включающий матном порядке со смещением по длине секционную крепь, на забойных полу- секций крепи на шаг передвижки.
секциях KOTopbtx установлены исполни- тельньй орган и гибкие несущие элементы, а на завальных полусекциях - Г-образные захваты, связанные с Г- образными захватами забойных полусекций гибкими оболочками механизма передвижения, и гибкие несущие элементы, отличающийся тем,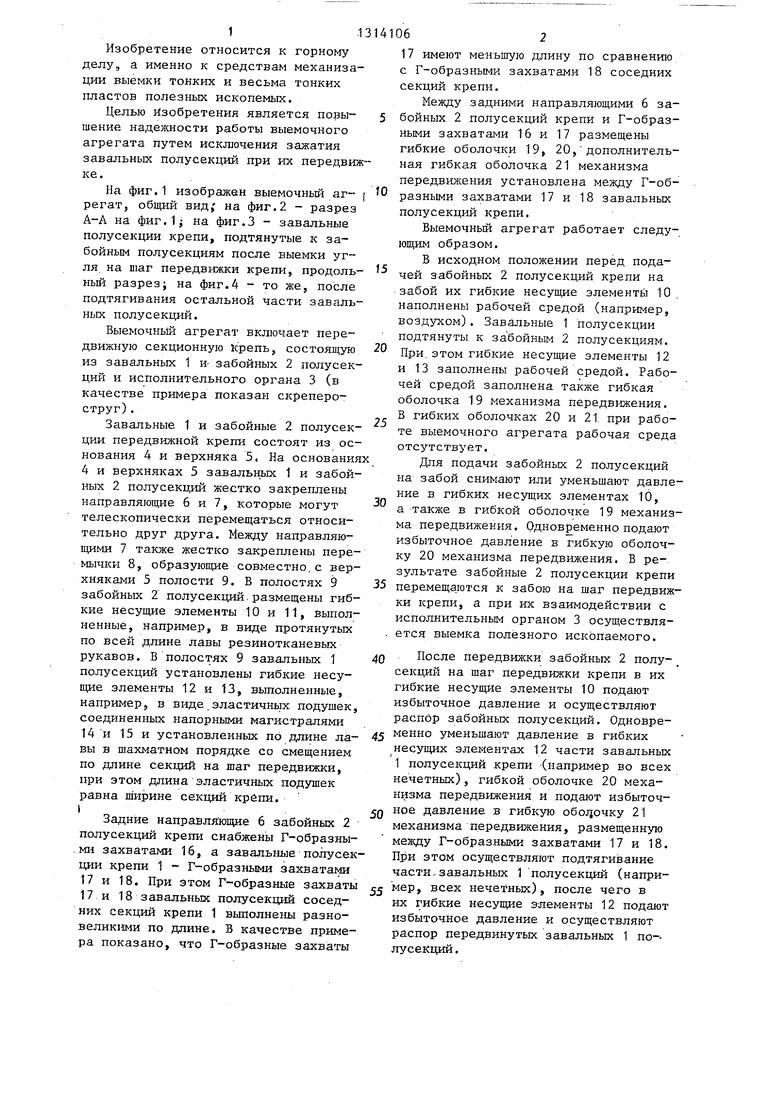
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2004 |
|
RU2260125C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2004 |
|
RU2276730C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2001 |
|
RU2205961C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2005 |
|
RU2277173C1 |
| Механизированная крепь для мощных пластов | 1985 |
|
SU1323733A1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 1990 |
|
RU2030588C1 |
| УГЛЕДОБЫВАЮЩИЙ АГРЕГАТ | 1996 |
|
RU2130553C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2003 |
|
RU2244832C1 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 2004 |
|
RU2267611C2 |
| МЕХАНИЗИРОВАННАЯ ПНЕВМАТИЧЕСКАЯ КРЕПЬ | 1991 |
|
RU2030589C1 |
Изобретение относится к средствам механизации выемки тонких и сред- нетонких пластов полезных ископаемых. Цель изобретения - повышение работы выемочного агрегата путем исключения зажатия завальных полусекций при их передвижке. Выемочный агрегат включает секционную крепь из завальных и забойных полусекций и исполнительного органа 3. В полостях 9 забойных полусекций размещены глбкие несущие элементы 10 и 11. Выполнены они из AiA соединенных между собой в ряд эластичных подушек, соединенных напорными магистралями 14 и 15 и установленных по длине лавы в шахматном порядке со смещением по длине секций на шаг передвижки. Длина эластичных подушек равна ширине секции крепи. Задние направляющие 6 забойных полусекций имеют Г-образные захваты (ГОЗ) 16, а завальные полусекции - ГОЗ 17 и 18. Последние выполнены разновеликими по длине. Между направляющими 6 забойных полусекций и ГОЗ 16, 17 размещены гибкие оболочки 19,20 механизма передвижения. Между ГОЗ 17 и 18 установлена дополнительная гибкая оболочка 21 механизма передвижения. Для подачи забойных п.олусекций на забой снимают или уменьшают давление в гибких несущих элементах 10 и гибкой оболочке 19 механизма передвижения. При подтягивании завальных полусекций осушествляют подачу избыточного давления в гибкую дополнительную оболочку 21 и уменьшение давления в гибких несущих элементах 12. 4 ил. с (Я 00 74 13 гг 8 3 75 J3 Г2 79 21 20 W 1J 9 Ю 7 6 5 J - ll// / / / / 4 г 1г т1 А / т X/ кг W ШкЗг Л Ч:7Ч,. ч. л X 44гЫ (( УА f,,af,fff . С )7-Чт) W 1J 9 Ю 7 6 5 J / / 44гЫ (( УА f,,af,fff . С )7-Чт) 05 76 17. 18 Фиг.2
5 5 7 139 Л 8 7 /J 72
II Illiril I
6 6474
19 21 206 7
L
7 7 76 77 78
Фиг.З
5 5747:5 72 73 74 12 13 27 20 6
III// I/ /
«
f f л ( г f , г L.
T TCvS Ste-Oi
/ ;
8
I I I 776 77 78
фиг. 4
Редактор Н.Слободяник
Составитель В.Пономарева
Техред Л.Сердюкова Корректор И.Шулла
Заказ 2194/38Тираж 455Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Л{-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Механизированная крепь для пологих пластов | 1980 |
|
SU898090A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Авторское свидетельство СССР № 933985, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
