Изобретение относится к горной промышленности и предназначено для подземной разработки угольных месторождений.
Известен угледобывающий агрегат АК-3, представляющий собой конструктивное и технологическое соединение стругового отбойно-доставочного органа, пространственно развитого става с направляющими исполнительного органа, секционной гидравлической крепи с перекрытием и основанием, кинематически связанными с помощью балансиров и гидравлической системой агрегата, обеспечивающей управление движением агрегата в соответствии с переменной гипсометрией и мощностью пласта без присутствия людей в очистном забое при добыче угля [1].
Угледобывающие агрегаты необходимо сравнивать с комплексами, имеющими в забое не менее трех различных видов оборудования - выемочной машины (комбайна или струга), конвейера и механизированной крепи, что создает существенные трудности для автоматизации управления ими [2].
Недостатком агрегата АК-3 применительно к пологому падению пласта (агрегат А-3) оказалась большая энергоемкость транспортировки угля при длинных, более 150 м лавах, применяемых на пологих пластах. Применение же агрегата на крутых пластах Кузбасса, где применяются короткие забои, а транспорт идет практически самотеком, выявило необходимость отказаться от относительно сложных концевых приводов с электродвигателями большой мощности и замены их гидравлическими домкратами, использующими общие с гидрокрепью источники энергии с лучшими показателями по пожаро- и взрывобезопасности.
Известен угледобывающий агрегат АСБ (агрегат струговый бесцепной и бескабельный), исполнительный орган которого длиной 30 м был испытан в стендовых условиях в 1982 г. на углецементном блоке и принят в качестве прототипа [3].
Исполнительный орган агрегата состоит из четырех стругов, смонтированных на направляющих, прикрепленных к базе (забойному конвейеру) и соединенных между собой посредством продольных тяг в струговую систему. приводимую в возвратно-поступательное движение гидравлическим механизмом передвижения, состоящим из последовательно соединенных гидроцилиндров, расположенных внутри приставки става, с направляющими для домкратов, тяг и стругов.
Исполнительный орган агрегата может подаваться на забой как фронтально порционировано после выемки каждой полосы угля, так и фронтально непрерывно с выемкой стружки угля до 200 мм.
Недостатками прототипа является невозможность полной выемки пласта в соответствии с изменением гипсометрии и мощности пласта по длине забоя без присутствия людей в лаве; применение односторонних стругов, не позволяющих уменьшить число одновременно работающих на струге резцов и требующих повышенного усилия прижатия струга к почве для восприятия опрокидывающего момента, действующего на став агрегата, нерациональное расположение по ширине выработанного пространства его опор, необходимость вследствие этого существенного увеличения веса става; открытое сверху пространство внутри приставки става, не обеспечивающее расштыбовки расположенных там направляющих при изменении гипсометрии пласта, применение опор скольжения на главных силовых факторах и отсутствие технического решения по привязке крепи агрегата к исполнительному органу с точки зрения их совместной "агрегатной" работы как при выемке угля, так и при поддержании кровли.
Известна механизированная крепь М138 комплекса КМ38 (КМ138А) и целый ряд щитовых крепей, представленных в качестве классификации в виде 12-ти конструктивных схем их секций (4). В качестве перспективы предполагается применение 1-2-стоечных модулей с шагом каждого 1 м и сборкой по 2 или 3 модуля.
Все эти крепи имеют перекрытия, основания, кинематически-силовые связи между ними, стойки, домкраты передвижения, расположенные на почве и соединяющие основания крепи с конвейером (базой) либо непосредственно, либо через тяги, лежащие также на почве.
Недостатком крепи является то обстоятельство, что при большой ширине ее в направлении от забоя к завалу, большом весе, большом количестве стоек и домкратов она не участвует в удержании става и конвейера от опрокидывания в сторону забоя и от сползания става по падению пласта, а став в свою очередь при всей его прочности не участвует в удержании крепи в направлении падения пласта и боковой устойчивости секции крепи.
С целью устранения указанных недостатков прототипа став конвейера поднят над почвой на величину клиренса, определяемого расчетной кривизной пласта, и снабжен двумя опорными лыжами, одной под забойным концом става, а другой -на завальном конце балки, которая жестко (в поперечной плоскости) прикреплена к завальной стороне става, и прижат сверху передними стойками крепи, наклоненными попарно в разные стороны в плоскости, параллельной оси ходка, и соединенных со ставом и с перекрытием крепи с помощью сферических шарниров, например "уключин", обеспечивая восприятие продольных сил от става на крепь при резании угля стругами, продольных сил от перекрытия секции на став при передвижке крепи на наклонном или крутом пласте и обеспечивая "покачивание" передних стоек при передвижке става на забой или при выдвижке секций крепи с подпором кровли, а система управления агрегатом снабжена устройством программного управления по гипсометрии и мощности пласта и датчиком контроля движения агрегата относительно границы уголь-порода с прогнозированием гипсометрии пласта на шаг вперед в направлении подвигания забоя.
Для устранения недостатков крепи кинематическая связь крепи и става выполнена согласно схеме по фиг. 3 и фиг. 5 и отличается от крепи М138 тем, что передний ряд стоек опирается не на основания крепи, а на став в средней зоне его между забойной и завальной лыжей, увеличивая как бы вес става, участвующий в создании восстанавливающего момента става для восприятия опрокидного момента при форсированных режимах резания по крепким углям либо при силовом резании стружками большого сечения. Кроме того, с целью уменьшения количества одновременно работающих резцов исполнительный орган состоит из двух стругов, каждый из которых имеет два поворотных резцедержателя: один для работы при движении струга от края лавы к ее центру, а другой - при обратном движении, причем один резцедержатель имеет половину резцов, обрабатывая только четные (или нечетные) линии резания, а второй несет вторую половину резцов, но обрабатывает нечетные (или четные) линии резания со сдвигом их на полстружки в сторону подвигания забоя по схеме "сотового резания".
При этом механизм передвижения стругов выполнен из трех телескопических цилиндров, разбитых на две группы с тележкой между ними и размещенных внутри коробчатой приставки конвейера, имеющей продольный паз вдоль верхней стенки, перекрытый цепью горизонтальных пластин с возможностью продольного перемещения одной относительно другой с суммарным ходом перемещения средней пластины, через которую проходит силовой стояк тележки, равным Л/2.
Механизм управления стругами по гипсометрии и мощности пласта включает две копирные линейки, расположенные вдоль става и взаимодействующие с рычагами двух следящих блоков струга, причем корпуса следящих блоков укреплены на стругах подвижно и взаимодействуют в качестве обратной связи с кулачком продольного перемещения резцедержателя верхней (кровельной) группы или с рычагом поворотного пересечения резцедержателя нижней (почвенной) группы резцов, а гидропитание следящих блоков обеспечивается выпрямителем переменного давления, подаваемого по стояку тележки, трубопроводами, закрепленным на тягах стругов, и расположенного на корпусе каждого струга, причем под напорные клапаны выпрямителей установлена пружина, снижающая рабочее давление на входе в следящие блоки.
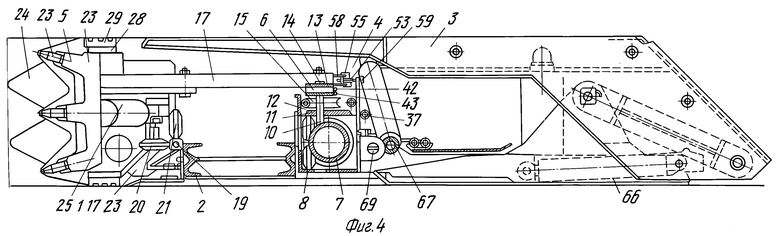
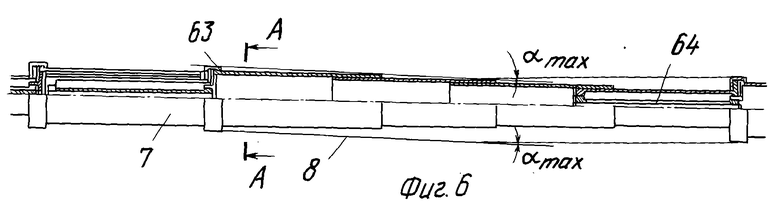
На фиг. 1 изображен общий вид агрегата, на фиг. 2 - гидравлическая схема исполнительного органа агрегата, на фиг. 3 - кинематическая схема секции крепи агрегата, на фиг. 4 - поперечное сечение по крепи, исполнительному органу и ставу, на фиг. 5 - сечение Б-Б по секции крепи, на фиг. 6 - сечение по гидроцилиндру механизма передвижения струга - сечение В-В, на фиг. 7 - поперечное сечение гидроцилиндра, сечение А-А.
Агрегат состоит из исполнительного органа 1, става 2, крепи 3 и системы управления 4.
Исполнительный орган 1 включает два челноковых струга 5, соединенных между собой посредством продольных тяг 6 в струговую систему, приводимую в возвратно-поступательное движение гидравлическим механизмом передвижения, состоящим из последовательно соединенных гидроцилиндров 7, расположенных внутри приставки 8 става 2. Гидроцилиндры 7 разбиты на две группы, соединенные с одной тележкой 9, расположенной в средней части по длине лавы и связанной со средней тягой 6 посредством стояка 10. Стояк 10 проходит через продольный паз 11 в верхней части приставки 9, причем несет на себе одно звено шибера 12, перекрывающего продольный паз 11 от проникновения через него штыба. Вдоль всей длины лавы над продольным пазом 11 располагаются в два-три слоя цепь шиберов 12. соединенных между собой в телескопическую цепь, складывающуюся впереди движущегося стояка 10 и растягивающуюся позади движущегося стояка, полностью перекрывая паз 12.
Продольные тяги состоят из звеньев, соединенных между собой в виде цепи пластин 13 с вертикальными пальцами 14 и направляющими двухребордными роликами 15, движущимися по трубчатым направляющим 16 приставки 9 става. По концам цепи пластин продольные тяги соединены с порталами 17 обоих стругов 5.
Порталы стругов соединены с корпусом 18, движущимся по направляющей 19 и 20 с помощью вертикальных роликов 21, горизонтальных роликов 22, обратного захвата 23 и двухребордного ролика 15, связанного с порталом 17 струга.
Для обработки забоя струг имеет два поворотных резцедержателя: один трехрезцовый 23 для работы в сторону середины лавы и один двухрезцовый 24 - для работы в сторону от середины лавы. Поворотные резцедержатели 23 и 24 посажены на вертикальные оси и приводятся в движение в сторону забоя на величину полной стружки или в сторону конвейера с полным убором резцов - с помощью домкрата 25, расположенного под углом к резцедержателю в горизонтальной плоскости. Поворотные резцедержатели 23 и 24 выполнены каждый из двух, расположенных один в "тени" другого: одного основного 26 и второго выдвижного по мощности пласта 27. приводимого в движение вертикальным домкратом 28. При раздвижке последнего резцедержатель 27 выходит вместе со своими резцами вверх, обрабатывая переменную по высоте верхнюю часть забоя по мощности пласта. На верхней подъемной плите струга 29, связанной с выдвижным цилиндром домкрата 28, имеются поворотные кровельные резцедержатели 30, приводимые в движение домкратами 31, питающимися параллельно с домкратами 25, для выдвижки резцов при движении струга вперед и уборки резцов при обратном движении струга. Аналогична конструкция почвенных резцедержателей 32, приводимых в движение домкратами 33. Однако питаются эти домкраты отдельно от следящей системы управления 34, которая обеспечивает регулирование выдвижки домкратов 33 в зависимости от изменения гипсометрии почвы пласта по длине лавы.
Питание вертикальных домкратов 28 осуществляется аналогично от своей следящей системы управления, которая обеспечивает регулирование выдвижки домкрата 28 в зависимости от изменения мощности пласта по длине лавы.
Система управления агрегата. обеспечивающая энергопитание исполнительного органа и крепи от общей однотипной насосной станции 35, работающей на негорючей и пожаро- и взрывобезопасной водной эмульсии предназначена также для регулирования движения исполнительного органа по гипсометрии и переменной мощности пласта.
Для движения механизма передвижения струга попеременно в одну, а затем в другую сторону имеется один автоматически переключаемый центральный распределитель 36, от которого идут две гидромагистрали 37 и 38. Магистраль 38 запитывает ближайший к конвейерному штреку гидроцилиндр 8, а магистраль 37 проложена по всей длине лавы за приставкой става 8, где посредством рукава 39 запитывает крайний гидроцилиндр 7. В зоне тележки 9, где примыкающие к ней цилиндры заглушены заглушками 40 и 41, в стояке 10 выполнены два канала, сообщающие полости домкратов (т.е. линии 37 и 38) с двумя трубопроводами 42 и 43, закрепленными вдоль тяг 6 и соединенными со стругами в точках 44 и 45.
Эти точки питают домкраты 25 и 31, обеспечивая введение в работу резцов забойных и кровельных резцедержателей 26, 27 и 30, и питают выпрямитель 46, состоящий из четырех клапанов 47, обеспечивающих получение постоянного давление в точках 48 и постоянный слив в точке 49. Давление подается к штоковой полости домкратов 33 и 28 и к двум следящим блокам 50 и 51, к которым подводится слив. Следящий блок 51 своим приводным рычагом взаимодействует с копирной линейкой 53, а корпусом в качестве обратной связи взаимодействует с кулачком 54, закрепленным вдоль вертикального домкрата 28. Аналогично следящий блок 50 приводным рычагом взаимодействует с линейкой 55, а корпусом взаимодействует с точкой 56 домкрата 33 гипсометрии почвы.
Следящие блоки 50 и 51 расположены подвижно внутри коробки 57 и взаимодействуют с копирными линейками, управляемыми по программе, устанавливаемой воротами 59 через тяги 58.
Крепь 3 и став 2 связаны между собой органически согласно кинематической схеме по фиг. 3 с целью удержания става при возникновении повышенных реакций от резания угля на форсированных режимах с использованием массы и става и крепи. Эта же органическая связь позволяет использовать став для повышения устойчивости секций крепи и ее работы на наклонных пластах.
Органическая увязка крепи и става осуществляется за счет того, что став по своей кинематической схеме представляет собой в поперечном сечении лавы балку 60, приподнятую над почвой и имеющую переднюю и заднюю лыжу 61. Помимо веса балка прижата к почве двумя стойками 62, поставленными под углом друг к другу в плоскости, параллельной ходку. Это позволяет воспринять все нагрузки, действующие на став не только в плоскости чертежа, но и в продольной плоскости движения и резания струга, в том числе и нагрузки вдоль става при наклонном или крутом залегании пласта, с точки зрения устойчивости и несущей способности крепи эти стойки позволяют удерживать крепь от нагрузок по падению пласта, а также с точки зрения поджатия кровли при выдвижке секции крепи. Расположение передней стойки 62, существенно приближенное к забою, позволяет существенно уменьшить ширину крепи от забоя к завалу (примерно на 1 м), что уменьшает вес крепи без снижения ее сопротивления.
Агрегат работает следующим образом.
Центральный распределитель в изображенном на фиг. 1 виде подает рабочую жидкость в магистраль 38, нижнюю по падению пласта группу гидроцилиндров 7. Согласно фиг. 6 гидроцилиндры выполнены тройной телескопичности плунжерного типа со сквозным пропуском жидкости через все гидроцилиндры нижней группы до заглушки 40, которая предает усилие на тележку 9. При движении тележки гидроцилиндры раздвигаются, скользя своими ползунами 63 по внутренним поверхностям приставки 8, изгибаясь на их стыках на величину расчетного перегиба αmax . При этом пропуск и герметизация жидкости обеспечивается за счет упругой деформации трубопровода 64, соединяющего соседние гидроцилиндры самого большого и самого малого диаметра.
При движении тележки 9 жидкость из верхней группы гидроцилиндров выжимается в бак насосной станции по гидромагистрали 37. Усилие передвижения тележки (порядка 100-120 т) по стояку 10 передается тягам 6 и через них - обоим стругам 5.
Нижний струг движется из среднего положения, представленного на фиг. 1, вверх на ход Л/4, где Л - длина лавы. Цепь гидроцилиндров, занимавшая в среднем положении длину равную Л/2, удлиняется до размера 3/4 Л, после чего будет произведен реверс и тележка 9 пойдет вниз на суммарный ход Л/2. При этом нижняя группа гидроцилиндров сложится до размера Л/4. Таким образом длина группы цилиндров при двух стругах должна изменяться от Л/4 до 3хЛ/4, т. е. в три раза. На фиг. 6 видно, что для этого необходимо, чтобы гидроцилиндр имел тройную телескопичность с максимально возможным диаметром самой тонкой трубы. Реально достижимым диаметром оказался диаметр 220 мм, что при давлении 32 МПа дает теоретическое усилие 121,6 т или 24 т на один резец (три резца на одном струге и 2 резца - на другом). Экспериментально получено, что при такой силе на один резец возможно снятие стружки угля крепостью 300 кН/м до 300 мм. При движении вверх на верхнем струге работает два резца, а при движении вниз на верхнем струге работает три резца. Соответственно на нижнем струге три и два резца, причем в любом случае каждый струг берет только четные или нечетные линии резания по забою, а четные линии резания обрабатываются при обратном движении струга при движении резцов между ранее обработанными линиями резания и со сдвигом в сторону забоя на полшага подачи, что обеспечивает съем стружки по схеме "сотового" резания, т. е. с минимальной энергоемкостью отбойки и с максимальной сортностью отбиваемого угля по сечению стружки угля.
Выемка угля в соответствии с изменением гипсометрии пласта и его мощности по длине забоя осуществляется за счет копирования стругом двух копирных линеек 55 и 53, выставленных по программе воротками 59 вручную или дистанционно. Следящие блоки своими рычагами (см. [5]) и тягами 58 повторяют данное смещение копирной линейки, включают напор (или слив) в поршневую полость исполнительного домкрата, который начинает движение в нужную сторону и продолжает его до тех пор, пока корпус следящего блока [5], взаимодействующий с кулаком 54 (или соответственно с точкой 56), не сместится настолько, что относительное положение рычага и корпуса не восстановится и следящий блок снова придет в среднее положение, т.е. запертое. Таким образом силовой исполнительный механизм управления по гипсометрии и мощности пласта будет всегда копировать заданную программу.
При этом контроль фактического движения агрегата в соответствии с гипсометрией пласта осуществляется известным "Способом контроля положения агрегата по гипсометрии и в плоскости пласта", включающим жесткие трубы 65 с гибкими вставками, снабженными тензометрическими датчиками в двух плоскостях, и центральную ЭВМ.
Отличием предлагаемого способа является снабжение жестких труб встроенными датчиками барометрического давления для измерения низкого гидростатического давления в жидкости, заполняемой внутрь трубопровода 65. Последнее позволяет контролировать положение всех секций става в зоне забоя с точностью до 10 мм, причем не в относительных, а в абсолютных маркшейдерских координатах и запоминать эти координаты в центральной ЭВМ для точного контроля положения агрегата и пласта и прогнозирования этих абсолютных координат на последующий шаг выемки угля.
При работе струга по выемке угля став прижимается в почве стойками 62, расположенными под углом друг к другу так, что возникающий при отжиме от забоя опрокидывающий момент воспринимается моментом от произведения силы стоек и силы веса на плечо до задней лыжи става, далеко отнесенной в сторону завала, а реакция забоя от сил резания вдоль забоя воспринимается укосными стойками, имеющими раздельные гидрозамки для левых и правых стоек 62.
После выемки ленты угля став подается на забой домкратами секций 66, расположенными у почвы по оси симметрии секции. При этом стойки 62 перемещаются на забой своими нижними сферическими типа уключины, шарнирами 67 покачиваясь вокруг верхних уключин. Благодаря этому "качению" выдвижка с подпором производится с существенно меньшими сопротивлениями.
После выбора хода нижних домкратов 66 производится выдвижка секций крепи тремя группами рассредоточенно по всей длине лавы, причем данная секция разгружается до некоторого подпорного давления в стойках, включается на полное давление домкрат 66 на его сокращение и секция подтягивается в ставу 2, который удерживается домкратами 66 и стойками 62, прижимающими став к почве.
При выдвижке данной секции к забою ее стойка 62 осуществляет покачивание с подпором вокруг нижней уключины 67 методом также "качения", чем снижается сопротивление при выдвижке крепи с гарантированным подпором кровли.
При остановках агрегата на длительное время все стойки крепи, включая основные однорядные и забойные поджимные, - все эти стойки включаются на полное давление по насосной станции (32 МПа) для распора и на предохранительные клапана при общем отключении насосной станции (45...50 МПа), превращая крепь опять в двухрядную, что, учитывая существенное сокращение ширины поддерживаемой полосы кровли по сравнению с прототипом - крепи М138, восстанавливает (и даже увеличивает) общее сопротивление крепи по поддержанию кровли.
При подтягивании данной секции к ставу, удерживаемому соседними секциями, а также при фронтальной подаче става на забой существенно, чтобы став не искривлялся на стыках секций больше, чем на угол αmax. на который рассчитана проходимость гидроцилиндров 7 внутри приставки 8, диаметры ползунов 63 и гибкость компенсирующего трубопровода 64.
Это ограничение угла αmax обеспечивается широко разнесенными базами става в виде передней серьги 68 и заднего пальца 69.
Источники, принятые во внимание при экспертизе
1. Развитие техники для подземной добычи угля, калиевых и марганцевых руд, с. 172-174 рис. 68 и 67. М.: Недра, 1985.
2. В.Н. Хорин. Расчет и конструирование механизированных крепей, с. 250, М.: Недра, 1988.
3. См. п. 1, с. 90, 91, рис. 32.
4. А. А. Орлов и др. Крепление и управление кровлей в комплексно-механизированных очистных забоях, с. 234, рис. 9.2; с. 270, рис. 9.5, М.: Недра, 1993 .
5. Гидрораспределитель А.с. СССР N 257962, кл. 47д 21/01 03.01.1968.




Изобретение относится к горной промышленности и предназначено для подземной разработки угля. Оно направлено на повышение надежности работы и полноты выемки с учетом изменения гипсометрии пласта. Агрегат имеет несколько стругов, соединенных между собой, став конвейера с направляющими для них, механизированную крепь из секций, систему управления. Став конвейера поднят над почвой на величину клиренса, определяемого заданной расчетной кривизной пласта. Под забойным носком става и на завальном конце балки имеются опорные лыжи. Став прижат сверху передними стойками крепи, наклоненными попарно в разные стороны в плоскости, параллельной оси ходка, и соединенными со ставом и с перекрытием крепи сферическими шарнирами с обеспечением восприятия продольных сил става на крепь при резании угля, продольных сил от перекрытия секции на став при передвижке секции на наклонном или крутом пласте и покачивания передних стоек при передвижке става или выдвижке секций крепи с подпором кровли выдвигаемым козырьком перекрытия. Система управления агрегатом имеет механизм программного управления по гипсометрии и мощности пласта и датчиком контроля движения агрегата относительно границы уголь - порода с прогнозированием гипсометрии пласта на шаг вперед в направлении подвигания. 4 з.п.ф-лы, 7 ил.
| Хорин В.Н | |||
| Развитие техники для подземной добычи угля, калиевых и марганцевых руд | |||
| - М.: Недра, 1985, с.90,91, рис.32 | |||
| Фронтальный очистной агрегат для крутых пластов | 1980 |
|
SU994755A1 |
| Механизированная гидравлическая крепь для агрегатов угледобычных лав | 1986 |
|
SU1528326A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОДНОРОДНОСТИ СТРУКТУРЫ АТЕРОСКЛЕРОТИЧЕСКОЙ БЛЯШКИ | 2015 |
|
RU2584135C1 |
| DE 3511275 C1, 19.06.86 | |||
| DE 3627205 C1, 07.04.88 | |||
| Способ обнаружения и противодействия атакам типа отказ в обслуживании | 2024 |
|
RU2841028C1 |
