131
поджатых одна к другой нажимным устройством в виде линейного электродвигателя 5. Обмотки электродвигателя соединены с источником питания через регулировочные элементы, а якорь связан с ведущей П 2. Датчик 18 линейных перемещений включен в цепь управления приводом машины. Неподвижный элемент датчика закреплен на корпусе электродвигателя, а подвижный - на его якоре. При перегрузке П 2 перемещается вдоль оси вала совместно с
1
Изобретение относится к машиностроению и может быть использовано в устройствах для передачи ограниченного по величине крутящего момента в машинах с адаптивным управлением.
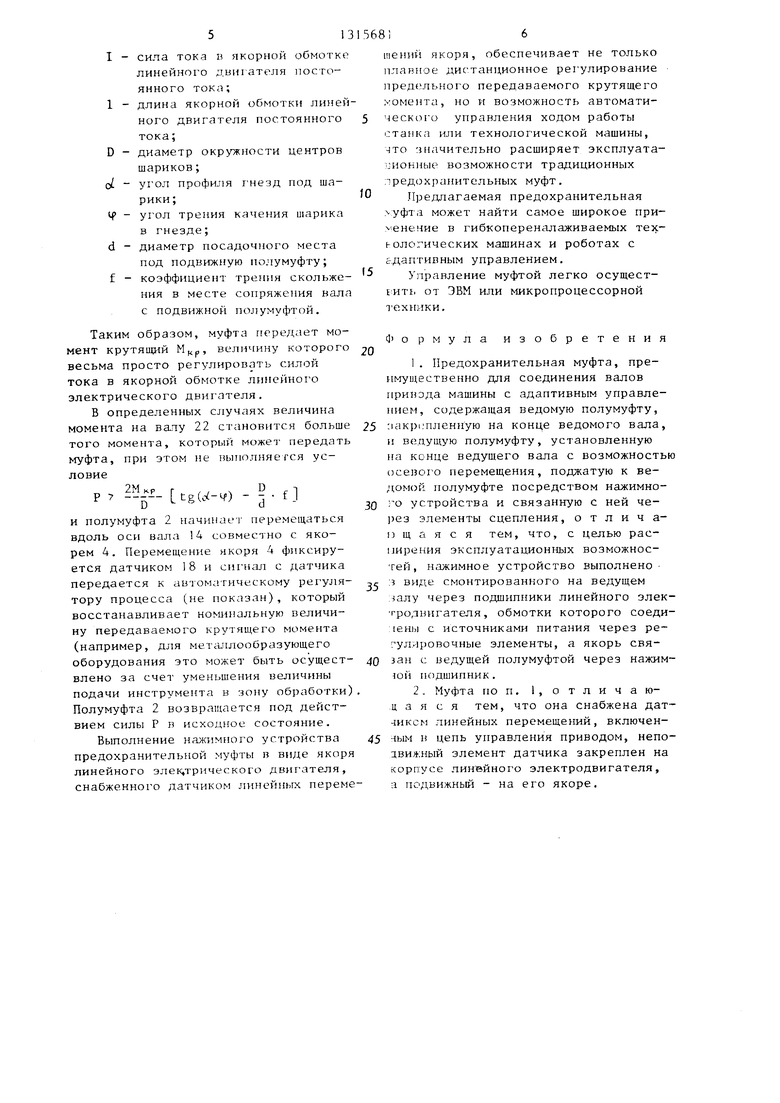
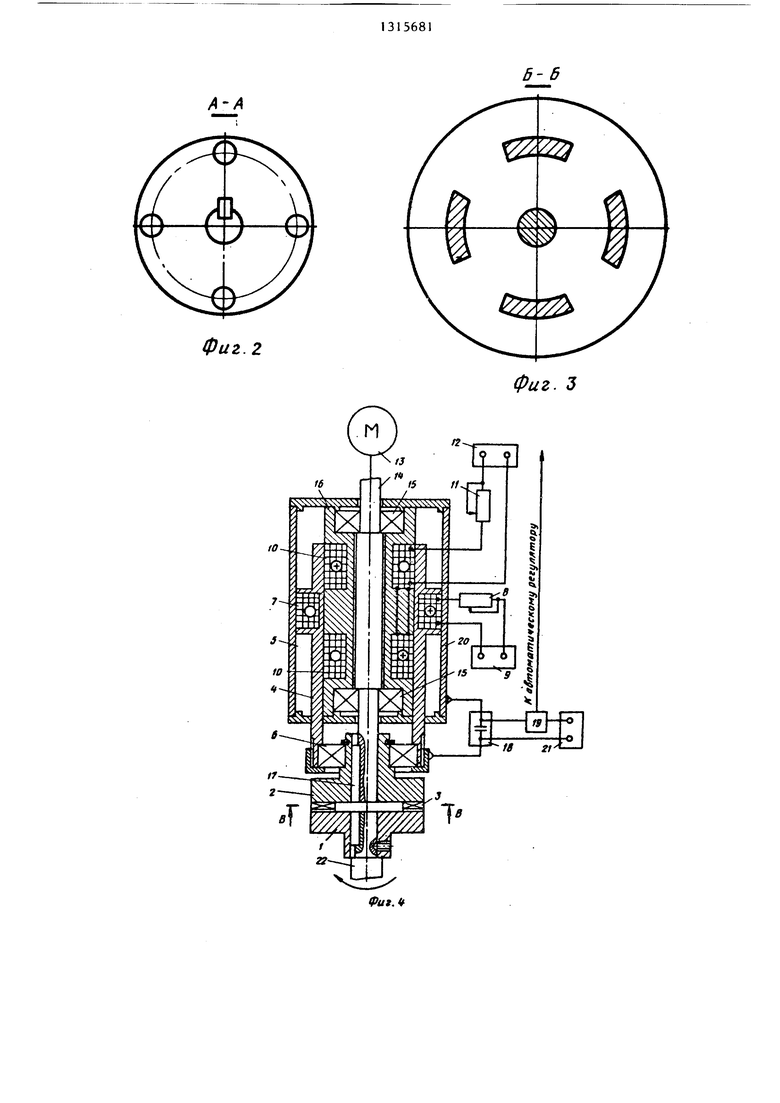
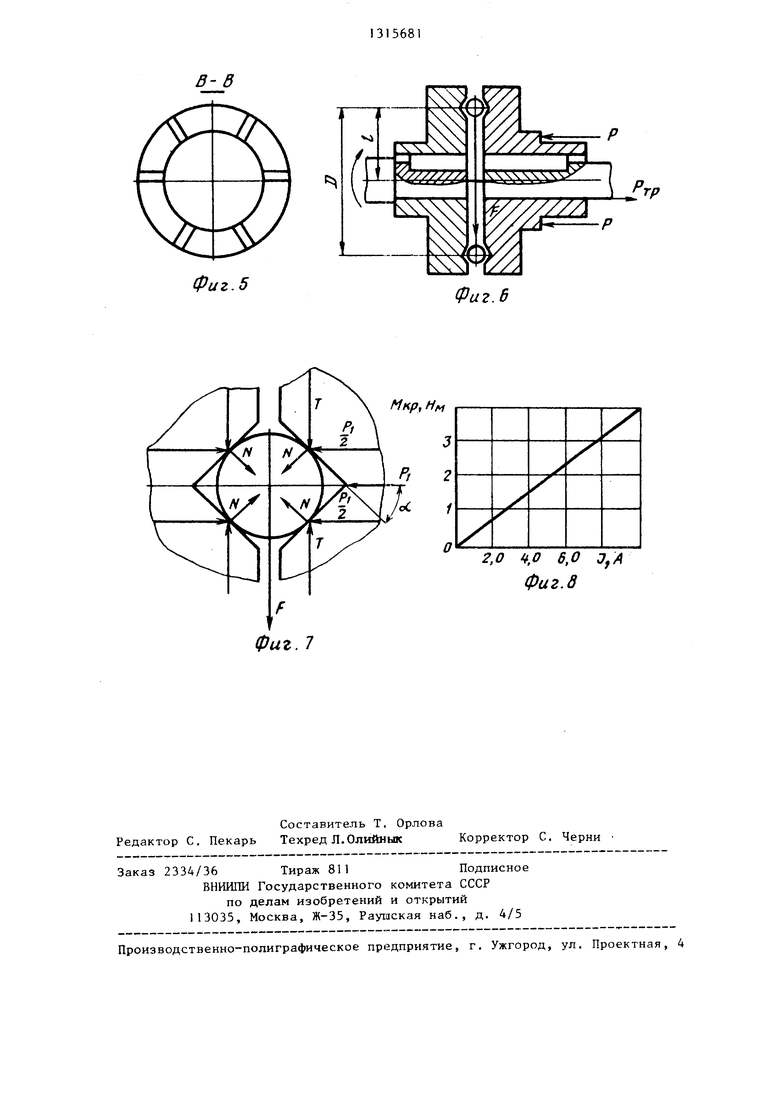
Целью изобретения является расширение эксплуатационных возможностей. На фиг. 1 представлена предохранительная муфта, общий вид; на фиг.2 разрез А-А на фиг, 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - предохранительная муфта с рабочими элементами в виде кулачков, общий вид; на фиг. 5 - разрез В-В на фиг.4 на фиг. 6 - расчетная схема предохра нительной муфты; на фиг. 7 - схема действия сил на шарик; на фиг. 8 - зависимость крутящего момента от силы тока якоря линейного электрического двигателя.
Предохранительная муфта содержит ведомую 1 и ведущую 2 полумуфты, связанные через элементы 3 сцепления (шарики), находящиеся в конусных гнездах полумуфт, которые сжимаются подвижным якорем 4 линейного двигателя 5 постоян ого тока через упорный шарикоподшипник 6. Якорь 4 имеет обмотку 7, подключаемую через регулировочный элемент 8 к источнику 9 питания. Линейный двигатель 5 имеет обмотку 10 возбуткдения, подключенную через регулировочный элемент 11 к отдельному источнику 12 питания.
Полумуфта 2 соединяется с при- водом 13 ее вращения посредством вала 14, который установлен на шариковых подшипниках 15 в магнитопроводе линейного двигателя 5. Вал 14 снаб681
якорем, величина перемещения фиксируется датчиком и сигнал передается в цепь управления приводом к автоматическому регулятору процесса, который восстанавливает номинальную величину передаваемого момента, например, путем уменьшения величины подачи инструмента в зону обработки. Величина усилия поджатия П изменяется регулировочными элементами 8 и 11. 1 з.п. ф-лы, 8 ил.
жен шпонкой 17 .для передачи крутящего момента от привода 13 к полумуфте 2, причем полумуфта 2 имеет возможность осевого перемещения вдоль оси вала 14 под действием приложенных к ней.сил. Дпя фиксации перемещений полу)1уфты 2 предусмотрен датчик 18 (емкостной, индуктивный и т.д.) линейного перемещения, который через блок 19 управления соединен с каким-либо автоматическим регулятором исполнительного органа технологической машины (не показаны) .
Подвижный элемент датчика 18 жестко закреплен на якоре 4, а неподвижный - на корпусе 20 линейного двигателя 5, Датчик 18 получает питание от отдельного источника 21.
Полумуфта 1 жестко насажена на выходной вал 22.
Полумуфты 1 и 2 могут иметь различное конструктивное исполнение. Так, на фиг. 4 представлена предохранительная муфта, в которой связь между полум фтами осуществляется шариками.
Муфта работает следующим образом.
Включают источники 9, 12 и 21 питания и регулировочными элементами В и I1 устанавливают ток необходимой величины в якорной обмотке 7 и обмотке 10 возбуждения. При прохождении электрического тока по обмотке 10 создается магнитный поток, при взаимодействии с которым тока якорной обмотки 7 на якорь 4 действует электродинамическая сила Р, определяемая по закону Ампера:
Р В I 1 8 in и.
где В - итадукция магнитного поля в
рабочем зазоре линейного двгателя ;
I - сила тока в якорной обмотке 1 - длина якорной обмотки; - угол между В и I, Направление силы Р определяется правилом левой руки и выбирается таким, чтобы полумуфты I и 2 сжимал шарики 3 через упорный шарикоподшипник 6, что обеспечивает контакт между полумуфтами 1 и 2 и передачу крутящего момента от вала 14 к валу 22.
Величина крутящего момента, передаваемого муфтой, определяется из следующих соображений (фиг. 6).
Усилие прижима Р якоря линейного двигателя через полумуфту 2 равномено распределяется на все шарики, значит На каждый шарик будет действовать осевое усилие Р
- i.
где п - число шариков.
Рассмотрим расчетную схему (фиг. с одним шариком. Усилие Р разложим на две составляющие, приложенные в точках контакта шарика с полумуфтами. При приложении силы Р в точке контакта возникает нормальная сила N, направленная к центру, которую можно разложить на две составляю щие: осевую, равную т альную Т, равную
-r-ti-..
и тангенципричем
N
-- coso
или
N
Т Р
sino 2tgo -sinoi . Так как муфта передает момент крутящий , то по линии центров шариков будет действовать окружное усилие F, образованное передаваемым моментом с плечом 1, равным
-i.
где D - диаметр окружности расположения центров шариков тогда
Р -
1 D
Таким образом, чтобы муфта передавала определенный М р без повышения его допустимого значения требуется, чтобы выполнялось неравенство F Г 2Т- п
или
РР
Y -- .п, F --- tgo tgo
С учетом сил трениякачения шариков в гнездах полумуфтугол оС уменьшается на угол (f (уголтрения качения), тогда
0
5
F
tg ()
Из условия равновесия подвижной 5 полумуфты 2 усилие Р прижима якоря 4 линейного двигателя должно быть
Р F.tg(o -ч-) или
р --5 tg(c/-if).
Учитывая силу трения , появляющуюся при движении полумуфты 2 на валу 14 по шпонке 17, равную Р - Р d
где - передаваемый крутящий момент;
d - диаметр вала; f - коэффициент трения скольже- 0ния,
можно записать 2MJ.LP D
Р
tg (ai -Ч)
f d
или
Р ()-5-fJ.
Учитывая, что в предлагаемой муфте
Р В . I 1, где Р - усилие, развиваемое якорем
линейного двигателя; В - индукция в рабочем зазоре
линейного двигателя постоянного тока;
сила тока в якорной обмотке; длина якорной обмотки.
I 1 получим
в
откуда
М
(-.) -5.f,
B-I- 1
kp
((-4) -
fj
M1 - крутящий момент, передаваемый муфтой;
В - индукция в рабочем зазоре линейного электрического двигателя постоянного тока;
51
I - сила тока в якорной обмотке линейного двигателя постоянного тока;
1 - длина якорной обмотки линейного двигателя постоянного тока;
D - диаметр окружности центров шариков;
о( - угол профиля гнезд под шарики;
Ч - угол трения качения шарика в гнезде;
d - диаметр посадочного места под подвижную полумуфту;
f - коэффициент трения скольжения в месте сопряжения вала с подвижной полумуфтой.
Таким образом, муфта передает момент крутящий М,р, величину которого весьма просто регулировать силой тока в якорной обмотке линейного электрического двигателя.
В определенных случаях величина момента на вапу 22 становится больше того момента, который может передать муфта, при этом не ныполняегся условие
р. 2M.,g D.
и полумуфта 2 начинает перемещаться вдоль оси вала 14 совместно с якорем 4. Перемещение якоря 4 фиксируется датчиком 18 и сигнал с датчика передается к автоматическому регулятору процесса (не показан), который восстанавливает но шнальную величину передаваемого крутящего момента (например, для метгишообразующего оборудования это может быть осуществлено за счет уменьшения величины подачи инструмента в зону обработки) Полумуфта 2 возвращается под действием силы Р в исходное состояние.
Выполнение нажимного устройства предохранительной муфты п виде якоря линейного элек,трического двигателя, снабженного датчиком линейных переме16
тений якоря, обеспечивает не только плавное дистанционное регулирование пред(пьного передаваемого крутящего хомента, но и возможность автоматического управления ходом работы станка или технологической машины, что зЕ1ачительно расширяет эксплуата- 1 иокные возможности традиционных предохранительных муфт.
Предлагаемая предохранительная :уфта может найти самое широкое при- енение в гибкопереналаживаемых технологических машинах и роботах с адаптивным управлением.
Управление муфтой легко осуществить от ЭВМ или микропроцессорной техники.
20
Формула изобретения
1.Предохранительная муфта, преимущественно для соединения валов привода машины с адаптивным управлением, содержащая ведомую полумуфту,
:1акрипленную на конце ведомого вала, и ведущую полумуфту, установленную на конце ведущего вала с возможностью oceBoi o перемещения, поджатую к ведомой полумуфте посредством нажимно; о устройства и связанную с ней че- 1)ез элементы сцепления, о т л и ч а- п щ а я с я тем, что, с целью рас- пирения эксплуатационных возможностей, нажимное устройство выполнено:з виде смонтированного на ведущем
через подшипники линейного электродвигателя, обмотки которого соединены с источниками питания через регулировочные элементы, а якорь связан с ведущей полумуфтой через нажим- юй подшипник.
2.Муфта по п, 1, о т л и ч а юц а я с я тем, что она снабжена датчиком линейных перемещений, включен- -1Ь1М в цепь управления приводом, неподвижный элемент датчика закреплен на корпусе линейного электродвигателя, L1 подвижный - на его якоре.
А-А
Фиг. 2
фиг. 3
to
7-
В- В
Фиг. 5
Фаг. б
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухрежимная электромагнитная пружинно-шариковая муфта | 2023 |
|
RU2816882C1 |
| Упругая муфта | 1977 |
|
SU727890A1 |
| Предохранительная муфта | 1988 |
|
SU1642131A1 |
| Шариковая предохранительная муфта | 1979 |
|
SU924443A1 |
| ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 1968 |
|
SU211238A1 |
| Фрикционная предохранительная муфта | 1983 |
|
SU1073507A2 |
| МАГНИТНАЯ МУФТА СЦЕПЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2130559C1 |
| МУФТА ПРЕДОХРАНИТЕЛЬНАЯ ОБГОННАЯ | 2006 |
|
RU2334139C1 |
| Предохранительная кулачковая муфта | 1990 |
|
SU1754967A1 |
| Магнитно-фрикционная муфта | 1990 |
|
SU1758303A1 |
Изобретение относится к области машиностроения и может быть использовано в машинах с адаптивным управлением для передачи ограниченного по величине крутящего момента, Це лью изобретения является расширение эксплуатационных возможностей. Муфта состоит из двух полумуфт (П) 1 и 2, сл г/ .f
2,0 4,0 6,0
Фиг.8
Составитель Т, Орлова Редактор С. Пекарь Техред Л.Олийнык Корректор С. Черни
--
Заказ 2334/36 Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Поляков B.C | |||
| и др | |||
| Справочник по муфтам | |||
| - М.: Машиностроение, 1979, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |
| VII,9. | |||
