Изобретение относится к швейной иромьппленности, а именно к устройствам для испытания и оценки качества конструкции и технологии одежды в статике и динамике в условиях, имитирующих производственную деятельность.
Цель изобретения - повышение точности экспериментальных данных и упрощение испытаний.
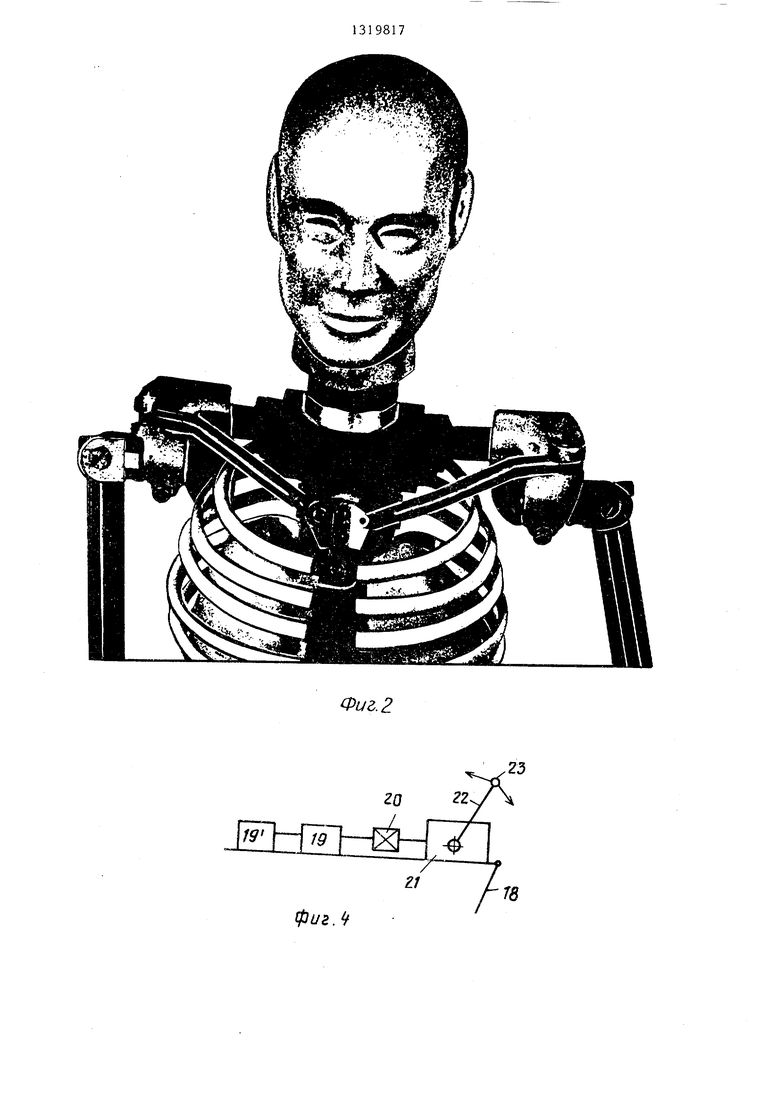
На фиг.1 изображен механический испытртель - манекен без одежды; на фиг.2 - шарниры и устройство плечевого пояса механического испытателя - манекена; на фиг.З - устройство механического испытателя одежды, общий вид; на фиг.4 - кинематическая схема механизации привода ноги манекена; на фиг.З - кинематическая схема механизма привода руки манекена; на фиг.6 - схема устройства поворота механизма правой и левой рук; на фиг.7 - схема механизма внешних контактов колена ноги; на фиг.8 - схема механизма внешних контактов локтя руки; на фиг.9 - схема механизма внешнего контакта сиденья; на фиг. 10 и 11 - схема локусов деформаций брюк спецодежды и одежды.
Предлагаемый манекен полностью имитирует структуру тела человека и основных его внутренних органов (фиг.1 и 2). Конструкция манекена обеспечивает имитацию подвижноетей костной структуры тела человека. Надетая на манекен одежда имитирует кожньш покров тела (фиг.З) человека по свойствам его тангенциального сопротивления Для имитации различных параметров структуры тела по полноте (живот) и по полу - (грудь, бедра) выполнены лиф-корсет и раздельные лиф и трусы, объемы которых вырезаны
Механизм привода ноги манекена (фиг.4) состоит из рамы станины 18, на которой он установлен в ограждеиз основных кусков плоской резины и
дополнены сменными поролоновыми вкла- 45 нии, электродвигателя 19 переменного
тока типа АО (,1 кВт, В) или постоянного тока с преобразователем-регулятором 19 управления ско ростями. Через муфту 20 (например, 50 пальчиковую) с тормозом ТК - 100
дьшхами. Их параметры установлены на основе размерной типологии населения и обмеров недостаюших измерений формы поверхности тела человека.
движение передается редуктору 21 (например, типа РА 75 с i 25) и водилу
В результате созданы возможности имитации любой формы поверхности тела человека.22, с которым подвижно соединена пеСтенд (фиг.З) состоит из рамы-ста- даль 23 захвата ноги, как на гоноч- нины 1 , установленной на сьемных ко- 55 ° велосипеде.
лесах-катках 2, крепящихся на раме. Механизм привода руки (фиг.5) сосНа поверхности станины установленытоит из рамы 24, на которой установ-
механизмы 3 привода движений левой илен (в ограждении) аналогичный элекправой ног.тродвигатель 25 (или с 25 ). Через
5
0
5
5
0
Посередине станины установлена вертикальная стохжа 4 жестко укрепленная на раме станины 1. Стойка жестко соединена с кронштейном 5, на котором осуществлено крепление позвоночника шеи манекена, подвешиваемого на шпильке, вставляемой в отверстие кронштейна 6. На станине справа и слева жестко крепятся стойки 7, на которых подвижно закреплены рамы 8, поворот которых осуществляется механизмом 9 и 10 поворота правой и левой сторон рам 8.
На нижней поверхности рам 8 установлен механизм 11 привода правой и левой рук через звездочки и цепи с ограждением 12.
Локус - математический участок - геометрическое место точек изменения какого-либо параметра.
Манекен 13 с внешней стороны имеет контакторы, устанавливаемые в соответствии с условиями испытаний. Например, на приведенном устройстве установлены три наиболее характерных контакта.
Контакт колена манекена в процессе носки осзпцествляется с контактором 14, шарнирно и подпружиненно укрепленным на стойке 15, жестко соединенной с рамой станины 1.
Контакт локтя манекена осуществляется с контактором 16, подпружиненно укрепленным на стойке 17, которая под углом жестко крепится к вертикальной стойке 9 рамы станины 1.
Контакт сиденья (выполнен в виде сиденья 18) шарнирно и подпружиненно укреплен на вертикальной стойке 4 станины 1.
Механизм привода ноги манекена (фиг.4) состоит из рамы станины 18, на которой он установлен в огражде45 нии, электродвигателя 19 переменного
тока типа АО (,1 кВт, В) или постоянного тока с преобразователем-регулятором 19 управления скоростями. Через муфту 20 (например, 50 пальчиковую) с тормозом ТК - 100
движение передается редуктору 21 (на22, с которым подвижно соединена пепример, типа РА 75 с i 25) и водилу
22, с которым подвижно соединена пе313
муфту 26 с тормозом движение передается регулятору 27, на валу которого установлена через шпонки приводная звездочка 28, соединенная обводными звездочками 29 и 30; которые болтами крепятся в пазах 31 подвижной рамы. Движение обводными звездочкам передается .цепью 32 в ограждении 33. К цепи 32 через подвижное вращающееся приспособление 37, выполненное в форме педали для руки, крепится захват 35 руки манекена, выполненный в виде скобы с прижимом.
Звездочки 29 и 30 выполнены съемными и могут передвигаться в пазах 31 для регулирования натяжения цепи и высоты подъема рук от уровня талии до уровня головы с изменением длины цепи.
Устройство поворота механизма правой и левой рук (фиг.ба) состоит из рамы-стойки 36 и жестко крепящихся на них верхнем 37 и со штырем и нижнем 38 со штырем 39 кронштейнах подвижной рамы. Кронштейны 37 и 38 центрированы друг относительно друга для вертикального положения подвижной рамы. Нижний кронштейн выполнен в сектора 40 (фиг„66) с отверстиями 41 по окружности через 10 для задания угла отведения рук в сторону и центрирован по штьфю 42 с верхним кронштейном 43 (фиг.бв) по штырю 44. Подвижная рама надевается на штыри кронштейна и закрепляется болтами в отверстиях 41 (фиг.бб).
Механизм внешнего контакта ног (фиг.7) состоит из задней стенки 45, шарнирно закрепленной на стойке 46 станины 47 рамы. Задняя стенка 45 внизу шарнирно соединена с плоскостью 48 и доской 49, жестко соединенных болтами. На доску набиваются (соединяются) контакторы 50 из различных материалов, с которыми контактирует одежда в носке. Чтобы истирание бьшо мягким, доска подпружинена пружиной 51, а чтобы пружина не выскакивала из гнезд 52, установлена ограничительная шпилька 53 с болтом 54. Она также служит для регулирова- вания силы прижатия пружины.
Механизм внешнего контакта локтя (фиг.8) отличается от механизма контактов ног отсутствием шарнирной задней стенки 55 и стойки, 56 - контактная плоскость, 57 - контактная доска 58 - шарнир контактной доски с зад98174
ней стенкой внизу, 59 - контакторы, 60 - пружины, 61 - гнезда пружины, 62 - ограничительная шпилька с болтом 63.
5Механизм внешнего контакта сиденья (фиг.9) состоит из задней стенки-стойки станины 64, на которой по- вешен манекен. Сиденье контактной плоскости 66 шарниром 67 соединено с 10 задней стенкой-стойкой и может сниматься с него. Сиденье выполнено специальной конфигурации для обеспечения необходимой для условий носки типографии контакта и подпружинено
t5 пружиной 68 в гнезде 69. На сиденье наклеиваются (обтягиваются) разные материалы контакторов.
Устройство работает следующим образом.
20Внутри манекена, на его внутренних органах (грудной клетке, позвоночнике, почках), устанавливаются датчики давления и перемещения. На поверхности манекена устанавливают
датчики давления на опорных поверхностях, физиологически чувствительных к давлению и соответствующих точкам иглоукальшания (у основания шеи, посередине плеча, в подмьплечной
30 и паховых областях, на мьш1цах рук, чувствительных к давлению). Опорную поверхность в статике и динамике определяют предварительно методом краски. Датчики перемещения устанавлива35 ют на манекене, а затем продевают иглой через весь или часть пакета одежды, что зависит от задачи исследований Датчики деформации, напряжений, углов сдвига устанавливают
40 в соответствии с локусами деформиро-п вания (фиг.10, 11). Изделие надевают и придают правильное положение на манекене, слегка подтягивая концы нитей датчиков перемещения и ставя на них отметку. Затем проводят балансировку измерительных мостов всех остальных датчиков.
Ноги и руки манекена устанавли- 5Q вают и закрепляют в захватах 28
(фиг.5) и 38 (фиг,6), Снова проводят балансировку. Подключают механический испытатель одежды к сети переменного тока 380 В. Включают устрой- 5J ство для работы по заданной программе: фаза, вид движения каждой рлтси и ноги относительно друг друга. При этом работа устройства осуществляется следующим образом. Если руки дви5131
жутся одна впереди, другая в стороне, то поворачивают подвижную раму 8 требуемой руки на нужньй угол в сторону.
При поступлении тока в электродвигатель 19 и редуктор 21 (фиг.4) чв рез водила 22 и захват 23 движение передается ногам манекена (фиг.З), которые получают сгибание или разгибание, в одной или разных фазах. Через муфту 20 с тормозом можно отключением прибора в любой фазе зафиксировать движения и снять экспериментальные данные, если это требуется.
При поступлении тока в электродвигатель 25 и редуктор (фиг.З) движение через вал редуктора передается звездочке 28, которая через обводные звездочки 29 и 30 и цепь 32 приводит в движение захват руки 35, каждую в своей фазе или одновременно. Муфтой 20 с тормозом производится останов в заданном положении каждой руки.
Работа контакторов заключается в следующем.
При выполнении человеком движения создается давление со стороны соответствующего участка тела на контактор, через него передается контактной доске и пружине, которая упруго сжимается, а после выполнения движения возвращается в первоначальное положение.
При отсутствии внешних контактов задняя стенка контакта колена ноги откидывается вправо, у контакта руки снимается ограничительная шпилька и контакт откидывается вперед, а сиденье снимается с петель шарнира.
Данньй прибор используется в учебном процессе для получения объективных показателей свойств одежды.
Формула изобретения
1.Стенд для испытания одежды, со- держа11Д1й манекен, датчики угла перемещения частей тела, датчики давления, деформации, напряжения, температуры и опорной поверхности одежды, приводное устройство, отличаю
76
щ и и с я тем, что, с целью повышения точности экспериментальных данных и упрощения испытаний, приводное устройство выполнено в виде одной
неподвижной рамы-станины, установленной на съемных колесах-катках, крепящихся на раме, и двух подвижных рам, выполненных с возможностью поворота и фиксации относительно плоскости
неподвижной рамы-станины, причем на поверхности неподвижной рамы-станины установлены механизмы привода движения ног и посередине рамы-станины установлена стойка, жестко соединенная с кронштейном для крепления позвоночника шеи манекена и жестко укрепленная на раме-станине, а на подвижных рамах установлены механизмы привода рук, выполненных в виде устройства захвата руки и цепной передачи с одной приводной и двумя обводными сменными звездочками, при этом каждое устройство захвата рук манекена через педаль подвижно соединено с цепью передачи, а на манекене установлены датчики в местах локусов соответствующих параметров, в местах, соответствующих внутренним органам, а также на элементах контактов одежды, расположенных с внешней стороны манекена.
2.Стенд ПОП.1, отличающийся тем, что элементы контактов одежды содержат подпружиненную
контактную доску со сменными накладками-контакторами, шарнирно соединенную с задней стенкой.
3,Стенд по п.2, о тличаю- щ и и с я тем, что задняя стенка
элемента контакта с коленом ноги манекена шарнирно соединена с неподвижной стойкой неподвижной рамы-станины и снабжена ограничительной шпилькой, размещенной между задней стенкой и
контактной доской.
4.Стенд по П.1, о т л и ч а ю - щ и и с я тем, что, с целью имитации теплоотдачи телом человека, введены электрообогревающие подкладки
с эластичными вставками на участках сгибания манекена.
Фиг.
Фид.2
11
фиг. 5
37
36
.Ъ9
фп
0


| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНИЧЕСКОЕ СРЕДСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССУАЛЬНЫХ ДЕЙСТВИЙ В КРИМИНАЛИСТИКЕ (ВАРИАНТЫ) | 2002 |
|
RU2221280C2 |
| Трехмерный посадочный манекен дляизмерения параметров характеризующихвнутренние размеры кузова автомобиля | 1974 |
|
SU508711A1 |
| Способ подгонки по размеру последовательных изображений нательных украшений для комбинирования с натурным изображением человека и установка для его осуществления | 1985 |
|
SU1373333A3 |
| Устройство для определения эргономических показателей качества конструкции швейных изделий | 1980 |
|
SU936873A2 |
| МАНЕКЕН НИЖНЕЙ ОПОРНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2401021C2 |
| МАНЕКЕН ДЛЯ ПРИМЕРКИ ОДЕЖДЫ | 2008 |
|
RU2387352C2 |
| Способ определения термоогнезащитных характеристик средств индивидуальной защиты | 2021 |
|
RU2790009C2 |
| Функциональная коляска для больных | 1984 |
|
SU1316673A1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЁР ДЛЯ ПОЗВОНОЧНИКА | 2022 |
|
RU2792398C1 |
| Устройство для тренировки спортсменов-единоборцев | 1985 |
|
SU1296190A1 |



Изобретение относится к швейной промышленности, а именно к устройствам для испытания и оценки качества констрзпсции и технологии одежды. Целью изобретения является повьшение точности экспериментальных данных и упрощение испытаний. Устройство содержит раму-станину 1, установленную на съемных колесах-катках 2, крепящихся на раме. На поверхности станины установлены механизмы привода движения ног 3. Крепление позвоночника или манекена осуществляется через кронштейн 5 с вертикальной стойкой, установленной посередине станины. На станине справа и слева жестко крепятся стойки 7, на которых подвижно закреплена рама 8. На нижней поверхности подвижных рам установлены механизмы привода рук через звездочки и цепи с ограждением 12, манекен с внешней стороны имеет контакторы, устанавливаемые в соответствии с условиями испытаний. 3 з.п. ф-лы, 11 ил. с (Л фи. 3
8
фиг. 7
Фиг.8
66
if
асло8н,е обшаиенш,. -- focma/t eifue CiKomug
- iffi:r - издедил
. K f zys f f acmaofl снлодкц
Фиб. 10
Редактор Н.Швыдкая
Составитель Л.Прохорова
Техред В.Кадар Корректор А. Зимокосов
Заказ 2540/2 Тираж 415 Подписное ВНИИПИ Государственного .комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Устройство для определения эргономических показателей качества конструкции швейных изделий | 1980 |
|
SU936873A2 |
| Механический грохот | 1922 |
|
SU41A1 |
