Изобретение предназначено для использования его в цепях управления электрогидравлических и электропневматических систем автоматики.
Целью изобретения является увеличение помехоустойчивости, чувствительности и точности преобразования.
На фиг. 1 представлено устройство для осуществления способа; на фиг. 2 - схема электрогидродинамического обратного преобразователя с емкостным датчиком недо- компенсации.
Устройство содержит блок управления 1, делители 2 и 3 опорного напряжения Uo, модуляторы 4 и 5, линии 6-8 связи (с паразитными емкостями), опорный конденсатор 9 (опорной емкости Со), усилитель заряда 10, демодулятор 11, дискретный интегратор 12, электрогидродинамический обратный нреоб- разователь 13 и емкостной датчик недоком- пенсапии 14, представляющие собой единый конструктивный узел 15 (фиг. 2).
В качестве нримера фиг. 2 приведена схема, ЭГОП-1 2 с однофазным диэлектриком. В конструктивном отношении он представляет собой два электрода типа игла 16 - трубка 17, размещенных в диэлектрическом корпусе 18, пространство между которыми заполнено однофазным диэлектриком (минеральным маслом). В качестве датчика недокомпенсации использованы емкостные датчики, образованные соответственно металлическими пластинами 19 и 20, 21 и 22, с находящимся между ними двухфазным диэлектриком, типа воздух-рабочая жидкость. В схеме (фиг. 1) используется один датчик недокомпенсации 14, хотя возможно и дифференциальное включение.
10
15
20
25
30
ток ионов, передающи движения окружающей
Период сигналов пер ме (фиг. 1) выбирают н док превышающим п перезаряда паразитных зи 6-8.
Увеличение помехоу достигается за счет с
Влияние паразитной зи 7 величиной С опр коэффициента усиления тегратора 12 и выража
я С
и;
в схеме по фиг. 1 к д 10, что возможно за с образования емкость- тической схеме.
Уменьшение влияни зи 6 и 8, подключенны Со и Сх, обеспечивается времени модуляторов 4
Введение демодулят го преобразования по уменьшить влияние его тические характеристик сигнал обратной связи демодулятора 11. При работает при малых з напряжения t/вых, благ мое значение амплитуд ся коэффициентом пода устройства в целом.
Для обеспечения пр ной зависимости Uaax нительное смещение н
Способ преобразования реализуется в s модулятором 5.
45
устройстве следующим образом.
Входное давление Р преобразуется в изменение емкости (С) в датчике недоком- ненсации 14. При подаче давления (фиг. 2) уровень диэлектрической жидкости между обмотками 19 и 20, 21 и 22 изменяется, 40 изменение емкости С преобразуют в переменный ток, пропорциональный смещенному (с помощью делителей 2 и 3) входному сигналу, полученный сигнал переменного тока сравнивают с сигналом переменного тока, пропорциональным опорной емкости конденсатора 9 (Со) с помощью делителя 2, модулятора 4 и конденсатора 9.
Полученную разность сигналов усиливают в усилителе 10 заряда и в дискретном интеграторе 12, перед которым сигнал демо- дулируют. В цепь обратной связи усилителя 10 включены обмотки датчика 14. Ток в конденсаторе создается модулированием в модуляторе 4 опорным напряжением Uo, а ток R конденсаторе емкости Сх датчика 14- выходным напряжением УВЫХ- Электрогидро- ди1И;л-1нческий преобразователь 13 при при- . iiii-KrimH к его электродам 16 и 17 резко не- . ;1П (родного поля создает униполярный по50
55
Для этого датчик лятора 5 переключает напряжением и ч пряжения, определяем коэффициента деления
Формула из
Способ преобразова рический сигнал путем ления в изменение емк компенсации емкости выходной сигнал с пос преобразованием выход сигнала в изменение да родинамическим уравно обратной связи входно нием сигнала рассогл щийся тем, что, с целью устойчивости, чувствит способа, изменение ем компенсации преобразу пропорциональный сме сигналу, полученный тока сравнивают с си тока, пропорциональны
0
5
0
5
0
ток ионов, передающий количество своего движения окружающей среде.
Период сигналов переменного тока в схеме (фиг. 1) выбирают не менее чем на порядок превышающим постоянную времени перезаряда паразитных емкостей линий связи 6-8.
Увеличение помехоустойчивости способа достигается за счет следующих моментов.
Влияние паразитной емкости линии связи 7 величиной С определяется значением коэффициента усиления усилителя 10 и интегратора 12 и выражается коэффициентом
я С
и;
в схеме по фиг. 1 к должно быть не менее 10, что возможно за счет выполнения преобразования емкость-напряжение по астатической схеме.
Уменьшение влияния емкости линий связи 6 и 8, подключенных к другим выводам Со и Сх, обеспечивается выбором постоянной времени модуляторов 4 и 5.
Введение демодулятора 11 в цепь прямого преобразования позволяет существенно уменьшить влияние его параметров на статические характеристики устройства, так как сигнал обратной связи берется уже после демодулятора 11. При этом усилитель 10 работает при малых значениях выходного напряжения t/вых, благодаря чему допустимое значение амплитуды помехи определяется коэффициентом подавления помехи всего устройства в целом.
Для обеспечения прямо пропорциональной зависимости (Pb) введено дополнительное смещение напряжения на датs модулятором 5.
модулятором 5.
Для этого датчик 14 с помощью модулятора 5 переключается между выходным напряжением и частью опорного напряжения, определяемого произведение.м коэффициента деления делителей 2 и 3.
Формула изобретения
Способ преобразования давления в электрический сигнал путем преобразования давления в изменение емкости в датчике недокомпенсации емкости - в электрический выходной сигнал с последующим обратным преобразованием выходного электрического сигнала в изменение давления и электрогидродинамическим уравновешиванием по цепи обратной связи входного давления с усилением сигнала рассогласования, отличающийся тем, что, с целью увеличения помехоустойчивости, чувствительности и точности способа, изменение емкости датчика недокомпенсации преобразуют в переменный ток, пропорциональный смещенному выходному сигналу, полученный сигнал переменного тока сравнивают с сигналом переменного тока, пропорциональным опорной емкости.
полученную разность сигналов усиливают, демодулируют и интегрируют, причем период сигналов переменного тока выбирают не менее чем на порядок превышающим постоянную времени перезаряда паразитных емкостей датчика недокомпенсации и электрогидродинамического обратного преобразователя.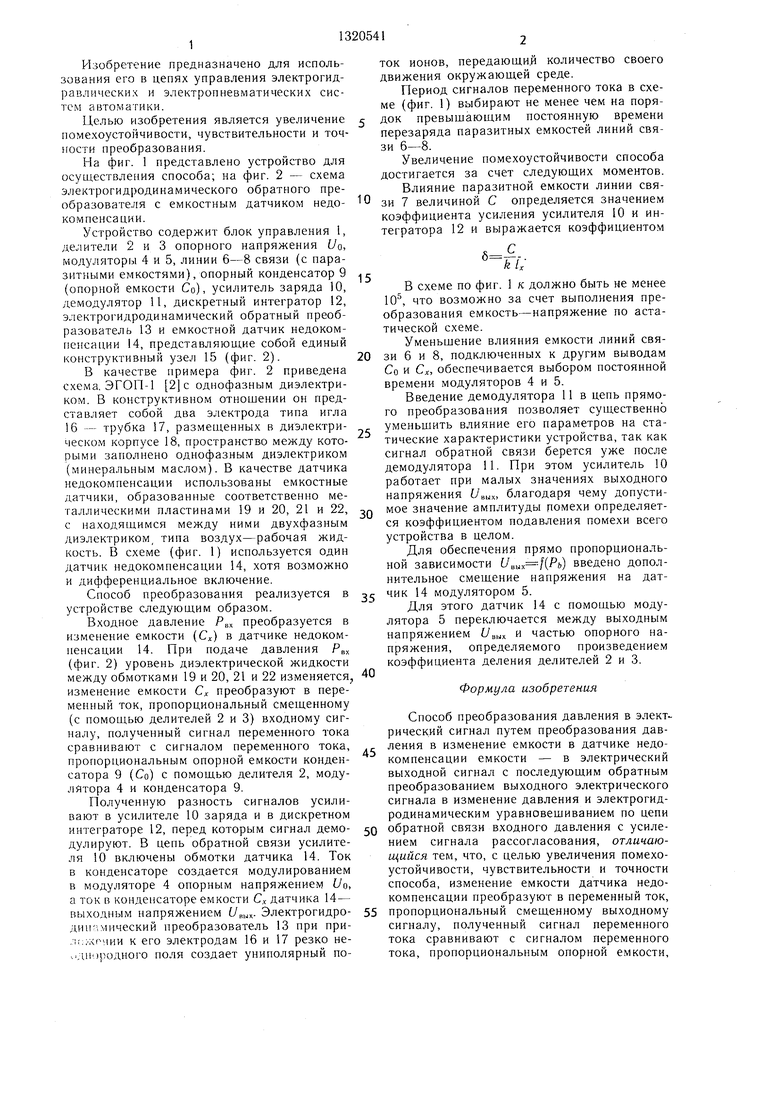
| название | год | авторы | номер документа |
|---|---|---|---|
| Компенсационный пневмогидроэлектрический преобразователь | 1985 |
|
SU1302036A1 |
| Операционный усилитель | 1982 |
|
SU1048485A1 |
| Устройство для преобразования перемещений в частоту | 1984 |
|
SU1221481A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2005 |
|
RU2289789C1 |
| Способ преобразования емкости дифференциального датчика | 1989 |
|
SU1762263A1 |
| ЭЛЕКТРОННАЯ СИСТЕМА КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2016 |
|
RU2638919C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора и устройство для его осуществления | 1980 |
|
SU928328A1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| Компенсационный пневмоэлектрический преобразователь | 1985 |
|
SU1326792A1 |
| УСИЛИТЕЛЬ ПОСТОЯННОГО ТОКА ТИПА ЛЩМ | 1970 |
|
SU259167A1 |

Изобретение относится к цепям управления электрогидропневматических управляющих цепей и позволяет повысить помехоустойчивость, чувствительность, точность преобразования. Для этого при реализации изобретения астатически уравновешивают токи в емкостном датчике недокомпенсации электродинамического обратного преобразователя и опорном конденсаторе, выбирая период изменения опорного напряжения существенно меньшим постоянной времени, обусловленной паразитными емкостями линий связи данных конденсаторов. Сигнал обратной связи (выходное напряжение) подают одновременно на вход электрогидродинамического обратного преобразователя с легкой диэлектрической рабочей жидкостью и емкостного датчика недокомпенсации, переключая последний между выходным напряжением и частью опорного напряжения. 2 ил. сл со ю о сд 4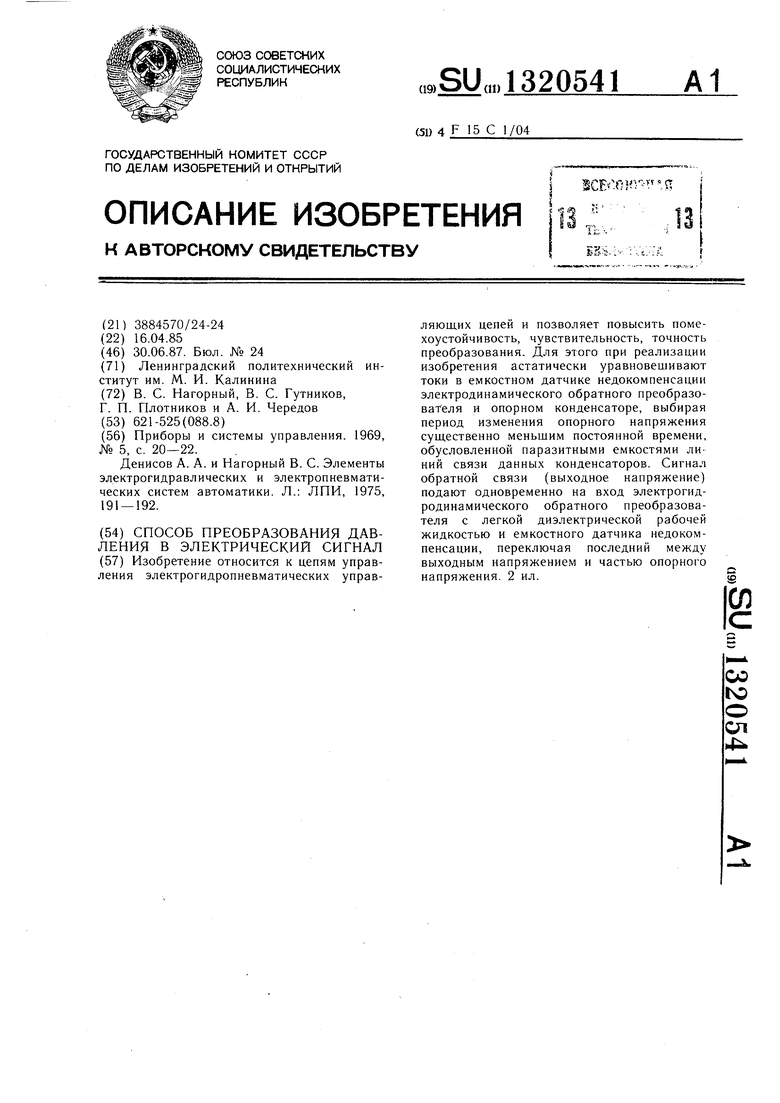
i/o
ивых.
(риг. 2.
| Приборы и системы управления | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Денисов А | |||
| А | |||
| и Нагорный В | |||
| С | |||
| Элементы электрогидравлических и электропневматических систем автоматики | |||
| Л.: ЛПИ, 1975, 191 - 192. | |||
