Изобретение относится к области измерительной техники - к устройствам для построения электронной системы преобразователя линейных ускорений. Оно может быть использовано в системах для измерения величины и направления ускорения, ударов, вибрации, а также углов отклонения от заданного положения.
Известен компенсационный акселерометр, содержащий первую пластину из монокристаллического материала, в которой образованы неподвижный элемент, подвижный элемент с электропроводными поверхностями, дифференциальный емкостный преобразователь с неподвижными электродами на второй и третьей пластинах, двухфазный генератор напряжения переменного тока, источник опорного напряжения постоянного тока, усилитель с двумя противофазными выходами, отличающийся тем, что на второй пластине выполнены первый и второй неподвижные электроды дифференциального емкостного преобразователя, на третьей пластине выполнены третий и четвертый неподвижные электроды, к первому неподвижному электроду подключены один из выходов двухфазного генератора напряжения переменного тока и один из выходов усилителя с двумя противофазными выходами, к третьему неподвижному электроду подключены второй выход двухфазного генератора напряжения переменного тока и второй выход усилителя с двумя противофазными выходами, второй и четвертый неподвижные электроды соединены вместе и подключены к входу усилителя с двумя противофазными выходами и к источнику опорного напряжения постоянного тока, причем первый и второй неподвижные электроды, а также третий и четвертый неподвижные электроды расположены на своих пластинах симметрично по отношению друг к другу относительно одной оси или перпендикулярной к ней другой оси [1].
Первый недостаток этого устройства заключается в том, что компенсационный сигнал в нем реализован по переменному напряжению. В результате к сигналу двухфазного генератора напряжения переменного тока будет добавлен компенсационный сигнал, частота которого будет отлична от частоты сигнала двухфазного генератора напряжения переменного тока. Это приводит к появлению дополнительных паразитных гармоник в устройстве и, следовательно, ухудшению точности измерения.
Второй недостаток этого устройства также связан с работой устройства по переменному току, в том, что выход устройства реализован по переменному току. Это приводит к усложнению методов измерения выходного сигнала и необходимости применения дополнительных вспомогательных устройств, выступающих в качестве посредника между данным устройством и нагрузкой.
Третий недостаток этого устройства заключается в том, что в качестве первичного усилителя сигнала рассогласования дифференциального емкостного преобразователя выступает стандартный усилитель переменного тока. Это приводит к тому, что паразитные емкости соединительных проводников будут вносит вклад в конечный результат измерения устройства и, следовательно, снижать точность измерения [2].
Четвертый недостаток этого устройства заключается в том, что обратная связь, реализованная в нем, относится к пропорциональному типу - П-регулятор. Это приводит к невозможности полного устранения ошибки регулирования, как следствие, повышению уровня шумов в выходном сигнале и, следовательно, снижению точности измерения.
Известен также компенсационный акселерометр, содержащий корпус со стойкой, на которой установлена первая пластина из монокристаллического материала с выполненными в ней подвижной частью, неподвижной частью и соединяющим их упругим шарниром, дифференциальный емкостный преобразователь положения с подвижным электродом на подвижной части и неподвижными электродами на второй пластине, магнитоэлектрический силовой преобразователь с дисковым постоянным магнитом с диаметральным направлением намагниченности и компенсационной катушкой на подвижной части, первый и второй резисторы, генератор высокой частоты, первый и второй усилители переменного тока, суммирующий усилитель, демодулятор, усилитель постоянного тока, причем первые выводы первого и второго резисторов соединены вместе и к точке их соединения подключен один выход генератора высокой частоты, к первому неподвижному электроду дифференциального емкостного преобразователя положения подключен второй вывод первого резистора, к второму неподвижному электроду подключен второй вывод резистора, второй вывод генератора высокой частоты подключен к подвижному электроду дифференциального емкостного преобразователя положения, точка соединения первого резистора и первого неподвижного электрода дифференциального емкостного преобразователя положения подключена к входу первого усилителя переменного тока, точка соединения второго резистора и второго неподвижного электрода подключена к входу второго усилителя переменного тока, генератор высокой частоты, первый и второй усилители переменного тока, суммирующий усилитель, демодулятор и усилитель постоянного тока выполнены в одной микросборке, установленной в корпусе, отличающийся тем, что первый и второй резисторы выполнены в одной микросборке с генератором высокой частоты, первым и вторым усилителями переменного тока, суммирующим усилителем, демодулятором и усилителем постоянного тока на одной подложке, первый и второй резисторы выполнены по интегральной технологии напылением слоя резистивного хромсилицидного сплава с температурным коэффициентом сопротивления не более 10-4 1/°C, толщина слоя выполнена с образованием коэффициента сопротивления 103 Ом на площадь квадратной поверхности, первый и второй резисторы выполнены с отклонением от номинального сопротивления не более 0,05%, первый резистор выполнен в виде последовательно соединенных первой, второй, третьей, четвертой, пятой, шестой и седьмой дорожек, являющихся прямолинейными отрезками, второй резистор выполнен в виде последовательно соединенных восьмой, девятой, десятой, одиннадцатой и двенадцатой дорожек, являющихся прямолинейными отрезками, первая, третья, пятая, седьмая, восьмая, десятая и двенадцатая дорожки выполнены параллельными друг другу, вторая, четвертая, шестая, девятая и одиннадцатая дорожки выполнены параллельными друг другу и перпендикулярными вышеуказанным семи дорожкам, все дорожки расположены так, что вторая, третья, четвертая и пятая дорожки расположены в области, находящейся между восьмой, девятой и десятой дорожками, все дорожки выполнены одинаковой первой ширины, на седьмой дорожке выполнено первое перпендикулярное ей ответвление второй ширины, большей первой ширины дорожек, на одиннадцатой дорожке выполнено второе перпендикулярное ей ответвление второй ширины, большей первой ширины дорожек, на одиннадцатой дорожке выполнено второе перпендикулярное ей ответвление второй ширины, на подложке выполнена первая контактная площадка, с которой соединены начала первой и восьмой дорожек, в конце седьмой дорожки выполнена соединенная с ней вторая контактная площадка, в конце двенадцатой дорожки выполнена соединенная с ней третья контактная площадка, первая, вторая и третья контактные площадки выполнены напылением слоя алюминия, к первой контактной площадке подсоединен выход генератора высокой частоты, к второй контактной площадке подключен вход первого усилителя переменного тока, к третьей контактной площадке подключен вход второго усилителя переменного тока [3].
Первый недостаток этого устройства заключается в том, что для работы устройства требуется использование магнитоэлектрического силового преобразователя с дисковым постоянным магнитом с диаметральным направлением намагниченности и компенсационной катушкой. Это приводит к увеличению габаритов всего устройства и усложнению его конструкции.
Второй недостаток этого устройства заключается в том, что обратная связь, реализованная в нем, относится к пропорциональному типу - П-регулятор. Это приводит к невозможности полного устранения ошибки регулирования, как следствие, повышению уровня шумов в выходном сигнале и, следовательно, снижению точности измерения.
Третий недостаток данного устройства заключается в том, что в качестве первичного усилителя сигнал рассогласования дифференциального емкостного преобразователя положения выступает стандартный усилитель переменного тока. Это приводит к тому, что паразитные емкости соединительных проводников будут вносит вклад в конечный результат измерения устройства и, следовательно, снижать точность измерения [2].
Четвертый недостаток этого устройства заключается в том, что в качестве первичного усилителя сигнал рассогласования дифференциального емкостного преобразователя выступает схема из первого и второго усилителя переменного тока и суммирующего усилителя. Такой раздельный съем сигнала с дифференциального емкостного преобразователя приводит к появлению дополнительных искажений выходного сигнала устройства и, следовательно, снижению точности измерения.
Известен также компенсационный акселерометр, содержащий первую пластину из монокристаллического материала, кремния, в которой образованы подвижный элемент, неподвижный элемент, вторую и третью пластины, дифференциальный емкостный преобразователь, двухфазный генератор переменного тока, источник опорного напряжения постоянного тока, усилитель, состоящий из усилителя переменного тока, фазового детектора и усилителя постоянного тока с двумя противофазными выходами, причем на второй пластине расположен один из неподвижных электродов дифференциального емкостного преобразователя, на третьей пластине расположен второй неподвижный электрод дифференциального емкостного преобразователя, первая пластина заключена между второй и третьей пластинами с зазором с каждой стороны между подвижным элементов и неподвижным элементом на соответствующей пластине, каждый неподвижный электрод дифференциального емкостного преобразователя на второй и третьей пластинах подсоединен к одному из противофазных выходов усилителя, отличающийся тем, что подвижный элемент первой пластины выполнен единым чувствительным элементом консольной конструкции, совмещающим подвижный элемент и упругий шарнир, с одинаковой толщиной по всей длине и всей толщине консоли чувствительного элемента, подвижный электрод дифференциального емкостного преобразователя выполнен в виде электропроводной поверхности чувствительного элемента, подвижный электрод на чувствительном элементе подключен к источнику опорного напряжения постоянного тока и к входу усилителя переменного тока, каждый из неподвижных электродов дифференциального емкостного преобразователя выполнен с расположением по длине консоли чувствительного элемента от границы между чувствительным элементом и неподвижным элементом первой пластины до свободного конца консоли чувствительного элемента или далее [4].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства заключается в том, что в качестве первичного усилителя сигнала рассогласования дифференциального емкостного преобразователя выступает стандартный усилитель переменного тока. Это приводит к тому, что паразитные емкости соединительных проводников будут вносит вклад в конечный результат измерения устройства и, следовательно, снижать точность измерения [2].
Второй недостаток этого устройства заключается в том, что обратная связь, реализованная в нем, относится к пропорциональному типу - П-регулятор. Это приводит к невозможности полного устранения ошибки регулирования, как следствие, повышению уровня шумов в выходном сигнале и, следовательно, снижению точности измерения.
Задача изобретения - повышение точности измерения ускорения за счет снижения шумов, снижения нелинейности передаточной характеристики, расширения частотного диапазона преобразования, увеличения диапазона измеряемых ускорений, снижения температурной и временной нестабильности смещения нулевого сигнала компенсационного акселерометра.
Это достигается тем, что электронная система компенсационного акселерометра, содержащая дифференциальный емкостный преобразователь, двухфазный генератор переменного тока, источник опорного напряжения постоянного тока, усилитель, состоящий из усилителя переменного тока, фазового детектора и усилителя постоянного тока с двумя противофазными выходами, отличается тем, что в качестве усилителя переменного тока выступает зарядовый усилитель, а в качестве усилителя постоянного тока выступает интегратор с двумя противофазными выходами и на выходе введен дополнительный усилитель постоянного тока, способна работать как в устойчивом, так и в условно-устойчивом режимах.
В качестве первичного усилителя сигнала рассогласования дифференциального емкостного преобразователя выступает зарядовый усилитель, коэффициент усиления которого регулируется внешним конденсатором, что позволяет устранить влияние паразитных емкостей соединительных проводников.
Введение интегратора с двумя противофазными выходами позволяет расширить тип обратной связи от пропорционального типа (П-регулятора), рассмотренного в прототипе, до пропорционально-интегрального типа (ПИ-регулятора) и устранить ошибку рассогласования в электронной системе компенсационного акселерометра.
Выбор режима работы осуществляется посредством изменения частоты генератора переменного тока и коэффициента усиления зарядового усилителя. В устойчивом режиме работы зарядовый усилитель обладает меньшим коэффициентом усиления, а генератор переменного тока обладает более низкой частотой. В условно-устойчивом режиме зарядовый усилитель обладает большим коэффициентом усиления, а генератор переменного тока обладает более высокой частотой.
В случае работы электронной системы компенсационного акселерометра в устойчивом режиме ошибка рассогласования будет полностью устранена и, соответственно, значительно снижен уровень шумов в выходном сигнале. В случае работы электронной системы компенсационного акселерометра в условно-устойчивом режиме ошибка рассогласования будет значительно снижена по сравнению с прототипом и, соответственно, будет также снижен уровень шумов по сравнению с прототипом. Но во втором случае, дополнительно к снижению уровня шумов по сравнению с прототипом, полностью устраняется влияние дифференциального емкостного преобразователя на нелинейность передаточной характеристики и частотный диапазон преобразования компенсационного акселерометра. Это достигается посредством работы электронной системы компенсационного акселерометра в условно-устойчивом режиме, когда электронная система с обратной связью находится на грани возбуждения и поэтому выходные параметры компенсационного акселерометра определяются исключительно параметрами электронной системы. Это позволяет также исключить влияние дифференциального емкостного преобразователя на температурную и временную нестабильность смещения нулевого сигнала. Также, посредством настройки коэффициента усиления усилителя постоянного тока можно регулировать выходную чувствительность электронной системы компенсационного акселерометра, диапазон измерения электронной системы может быть настроен для любого диапазона измерения дифференциального емкостного преобразователя. Все указанные выше технические эффекты - снижение шумов, снижение нелинейности передаточной характеристики, расширение частотного диапазона преобразования, увеличение диапазона измеряемых ускорений, снижение температурной и временной нестабильности смещения нулевого сигнала - приводят к повышению точности измерения компенсационного акселерометра.
Использование в качестве первичного усилителя сигнала рассогласования дифференциального емкостного преобразователя не стандартного усилителя переменного тока, а зарядового усилителя, позволяет выполнить первичный съем полезной информации посредством преобразования вида «заряд-напряжение», а не «емкость-напряжение». Это позволяет полностью устранить влияние паразитных емкостей соединительных проводников и, следовательно, повысить точность измерения компенсационного акселерометра.
В качестве инерционного звена вводится интегратор с двумя противофазными выходами, за счет чего тип обратной связи изменяется до пропорционально-интегрального типа (ПИ-регулятора). Это, в свою очередь, дает возможность для дополнительной регулировки параметров обратной связи электронной системы компенсационного акселерометра для более точной настройки режима работы электронной системы либо в устойчивом, либо в условно-устойчивом режимах.
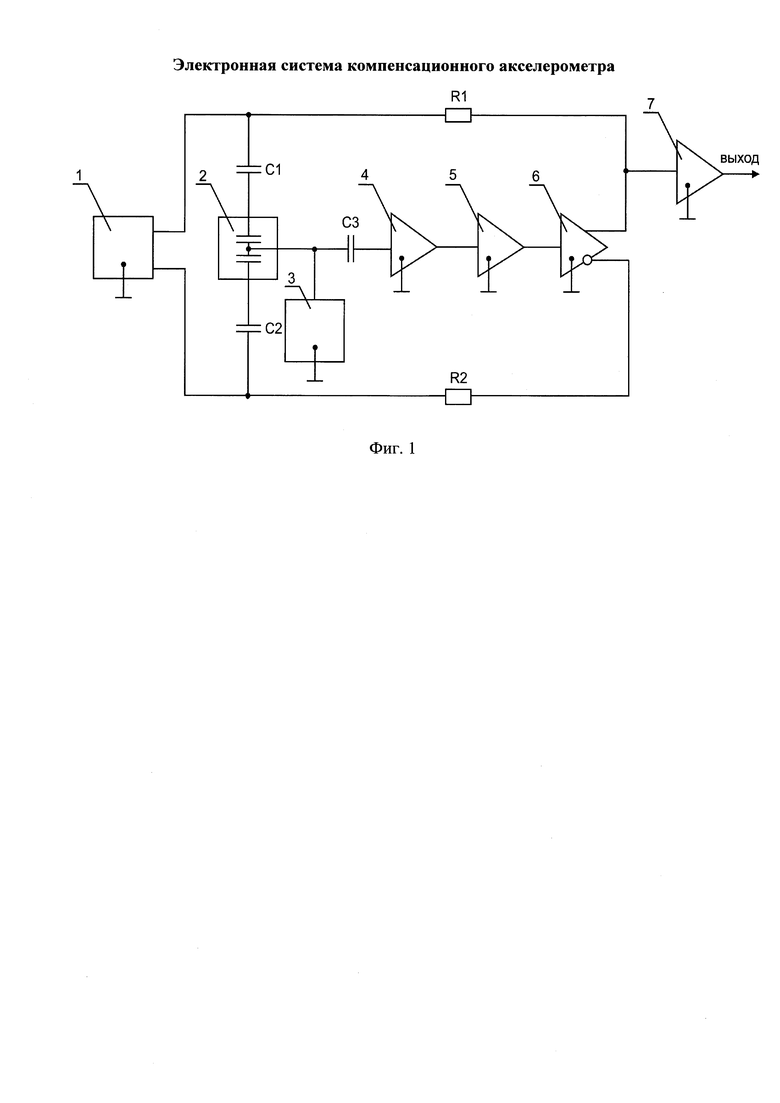
На фиг. 1 представлена электронная система компенсационного акселерометра, где
1 - двухфазный генератор переменного тока;
2 - дифференциальный емкостный преобразователь;
3 - источник опорного напряжения постоянного тока;
4 - зарядовый усилитель;
5 - фазовый детектор;
6 - интегратор с двумя противофазными выходами;
7 - усилитель постоянного тока;
R1, R2 - резисторы обратной связи;
C1, C2, C3 - блокировочные конденсаторы.
На фиг. 1 представлена электронная система компенсационного акселерометра, состоящая из двухфазного генератора переменного тока 1, один выход которого соединен с первым выводом первой емкости дифференциального емкостного преобразователя 2, а второй выход которого соединен со вторым выводом второй емкости дифференциального емкостного преобразователя. Выход источника опорного напряжения постоянного тока 3 соединен со вторым выводом первой емкости дифференциального емкостного преобразователя и с первым выводом второй емкости дифференциального емкостного преобразователя. Выход источника опорного напряжения постоянного тока также соединен с входом зарядового усилителя 4. Выход зарядового усилителя соединен с входом фазового детектора 5. Выход фазового детектора соединен с входом интегратора с двумя противофазными выходами 6. Прямой выход интегратора с двумя противофазными выходами через резистор R1 подключен к первому выводу первой емкости дифференциального емкостного преобразователя. Инверсный выход интегратора с двумя противофазными выходами через резистор R2 подключен ко второму выводу второй емкости дифференциального емкостного преобразователя. Прямой выход интегратора с двумя противофазными выходами также соединен с входом усилителя постоянного тока 7, выход которого является выходом электронной системы компенсационного акселерометра.
Электронная система компенсационного акселерометра работает следующим образом: двухфазный генератор переменного тока формирует прямоугольные импульсы фиксированной частоты. Уровни сигнала, поступающие на дифференциальный емкостный преобразователь, формируются с помощью переключения между двумя уровнями: землей (нулем) и либо положительным значением (для первой емкости дифференциального емкостного преобразователя), либо отрицательным значением (для второй емкости дифференциального емкостного преобразователя). Эти положительное и отрицательное значения формируются с помощью источника опорного напряжения постоянного тока. В результате со второго вывода первой емкости дифференциального емкостного преобразователя и с первого вывода второй емкости дифференциального емкостного преобразователя поступает сигнал, несущий полезную информацию о приложенном ускорении. Этот сигнал преобразуется в сигнал переменного напряжения посредством зарядового усилителя. После этого сигнал преобразуется в сигнал постоянного напряжения с помощью фазового детектора и, после преобразования посредством интегратора с двумя противофазными выводами и усилителя постоянного тока, поступает в виде управляющего сигнала обратной связи на дифференциальный емкостный преобразователь либо на выход электронной системы.
Проведенный анализ 489 наименований зарубежных и отечественных аналогов показал, что полученное решение не уступает или превосходит по нелинейности статической характеристики 95.8% наименований, по частотному диапазону преобразования - 68.9% наименований. Сравнение по остальным функциональным параметрам также показало, что полученное решение является конкурентоспособным. По среднеквадратичному отклонению шума разработанный преобразователь не уступает или превосходит 25.6% наименований, по температурной нестабильности нулевого сигнала - 35.1% наименований, по рабочему температурному диапазону - 31% наименований зарубежных и отечественных аналогов.
Источники информации
1. Патент РФ №2186401.
2. Топильский В.Б. Схемотехника измерительных устройств / В.Б. Топильский. - М.: БИНОМ. Лаборатория знаний, 2006. - 232 с.
3. Патент РФ №2249221.
4. Патент РФ №2173854 – прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149412C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2186401C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2173854C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2140652C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2149411C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2184380C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2461838C1 |
Изобретение относится к области измерительной техники, а именно к устройствам для построения электронной системы преобразователя линейных ускорений. Электронная система компенсационного акселерометра содержит дифференциальный емкостный преобразователь, двухфазный генератор переменного тока, источник опорного напряжения постоянного тока, усилитель, состоящий из усилителя переменного тока, фазового детектора и усилителя постоянного тока с двумя противофазными выходами. При этом в качестве усилителя переменного тока выступает зарядовый усилитель, в качестве усилителя постоянного тока выступает интегратор с двумя противофазными выходами, а на выходе введен дополнительный усилитель постоянного тока. Технический результат заключается в повышении точности измерения ускорения за счет снижения шумов, снижения нелинейности передаточной характеристики, расширения частотного диапазона преобразования, увеличения диапазона измеряемых ускорений, снижения температурной и временной нестабильности смещения нулевого сигнала компенсационного акселерометра. 1 ил.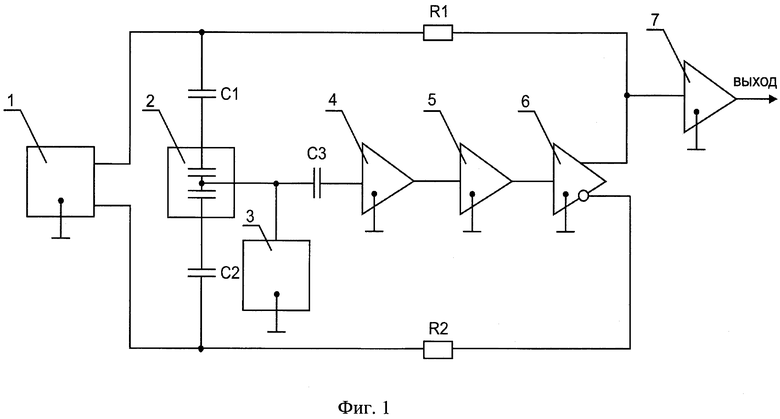
Электронная система компенсационного акселерометра, содержащая дифференциальный емкостный преобразователь, двухфазный генератор переменного тока, источник опорного напряжения постоянного тока, усилитель, состоящий из усилителя переменного тока, фазового детектора и усилителя постоянного тока с двумя противофазными выходами, отличающаяся тем, что в качестве усилителя переменного тока выступает зарядовый усилитель, в качестве усилителя постоянного тока выступает интегратор с двумя противофазными выходами, а на выходе введен дополнительный усилитель постоянного тока.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2173854C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| US 4611491 A1, 16.09.1986 | |||
| WO 2004086056 A2, 07.10.2004. | |||

