Изобретение относится к машиностроению, а именно к винтовым передачам, и может быть использовано, в частности, в механизмах подачи металлорежущих станков.
Цель изобретения - упрощение конструкции механизма, повышение КПД и долговечности за счет увеличения количества шариков в опорных подшипниках.
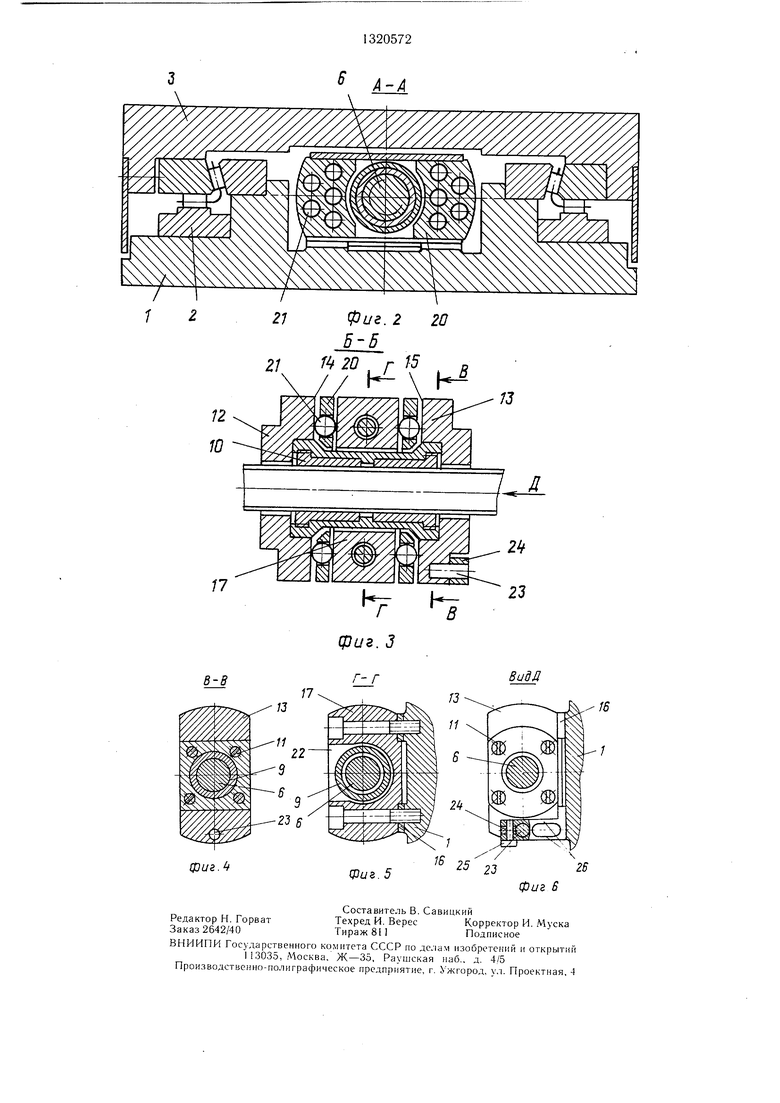
На фиг. 1 показана конструктивная схема механизма; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - сечение Г-Г на фиг. 3; на фиг. 6 - вид Д на фиг. 3.
Передача содержит корпус 1 с прямоли- . нейными направляющими 2, в которых с возможностью возвратно-поступательного перемещения размещен подвижный элемент 3. На элементе 3 параллельно направляющим 2 с помощью вращательных опор 4 и 5 закреплен винт 6, предпочтительно шарико- 20 вый. С винтом 6 через шарики 7 взаимодействует самоустанавливающаяся гайка 8, состоящая из корпуса 9 и двух полугаек 10, служащих для ликвидации зазора в винтовом соединении. На торцах корпуса 9 с помощью винтов 11 закреплены фланцы 12 и 13 с опорными плоскостями 14 и 15 соответственно, перпендикулярными оси винта 6
На корпусе 1 через компенсатор 16 между фланцами 12 и 13 жестко закреплен гайкодержатель 17 с опорными плоскостями 18 и 19, параллельными плоскостям 14 и 15. Между плоскостями 14, 19 и 15, 18 размещены сепараторы 20 с шариками 21. Вдоль оси винта 6 в гайкодержателе 17 выполнен паз 22, в котором с зазорами по пер.и- метру размещена гайка 8.
Для исключения проворота гайки 8 служит поводок, включающий цилиндрический палец 23, запрессованный во фланец 13 гай- , ки 8 параллельно винту 6. Палец 23 охвачен разрезной втулкой 24, натяг которой
Винтовая передача работает следующим образом.
При вращении винта 6 перемещение подвижного элемента 3 осуществляется путем передачи осевого усилия от поверхностей 14 или 15 гайки 8 на поверхности 19 или 18 гайкодержателя 17. Радиальное биение винта 6 и смещение его оси при регулировке зазора в направляющих 2 корпуса 1 компенсируются перемещением гайки 8 по 10 плоскостям 18 и 19 гайкодержателя 17. Осевое перемещение гайки 8 при этом отсутствует.
От проворота гайка 8 фиксирована пальцем 23, размещенным внутри отверстия втулки 24. В результате биения винта 6 гайка 8 соверщает плоскопараллельное движение. Упругие элементы 26 позволяют втулке 24 совершать такое же движение вместе с пальцем 23, жестко связанным с гайкой 8.
Формула изобретения
1. Винтовая передача, содержащая корпус с прямолинейными направляющими, размещенный в направляющих с возможностью возвратно-поступательного перемещения подвижный элемент, закрепленный на нем параллельно направляющим и с возмож - ностью вращения ходовой винт, взаимодействующую с винтом гайку с двумя перпендикулярными оси винта опорными плоскостями, жестко закрепленный на корпусе гайкодержатель с двумя опорными плоскостями, параллельными опорным плоскостям гайки, размещенные между опорными плоскостями гайки и гайкодержателя сепараторы с ща- , риками, размещенный между гайкодержа- телем и корпусом компенсатор и поводок гайки, включающий жестко связанный с гайкой палец и взаимодействующую с последним закрепленную на корпусе стойку, отличающаяся тем, что, с целью упрощения кон25
30
для обеспечения скольжения по пальцу 23 без 40 струкции и повышения КПД и долговечзазора регулируется винтом 25. Втулка 24 связана с основанием плоскими упругими элементами 26, которые в свободном состоянии перпендикулярны плоскости, проходящей через оси винта 6 и пальца 23. В силу этого условия элементы 26 обеспечивают подвижность втулки 24 относительно винта 6 в радиальном направлении и неподвижность ее в тангенциальном направлении.
Как вариант конструкции, компенсатор
45
ности, в гайкодержателе выполнен продольный паз, в котором с зазором по периметру размещена гайка, опорные плоскости гайки выполнены в виде двух жестко связанных с ней и охватывающих гайкодержатель фланцев, палец поводка выполнен цилиндрическим и жестко закреплен в одном из фланцев параллельно оси винта, а стойка выполнена в виде охватывающей палец разрезной втулки, связанной с корпусом
16, упругие элементы 26 и разрезная втул- rg плоскими упругими элементами, подвижными
ка 24 могут представлять собой единую де-относительно винта в радиальном направталь, как это показано на фиг. 6. Компен-лении и жесткими в тангенциальном насатор 16 служит для регулировки зазораправлении, между стенкой паза 22 и поверхностью гайки 8. Регулировка натяга шариков 21 произ-2. Передача по п. , отличающаяся тем,
водится подщлифовкой поверхностей 14, 15что разрезная втулка и упругие элементы
или 18 и 19.поводка жестко соединены с компенсатором.
Винтовая передача работает следующим образом.
При вращении винта 6 перемещение подвижного элемента 3 осуществляется путем передачи осевого усилия от поверхностей 14 или 15 гайки 8 на поверхности 19 или 18 гайкодержателя 17. Радиальное биение винта 6 и смещение его оси при регулировке зазора в направляющих 2 корпуса 1 компенсируются перемещением гайки 8 по плоскостям 18 и 19 гайкодержателя 17. Осевое перемещение гайки 8 при этом отсутствует.
От проворота гайка 8 фиксирована пальцем 23, размещенным внутри отверстия втулки 24. В результате биения винта 6 гайка 8 соверщает плоскопараллельное движение. Упругие элементы 26 позволяют втулке 24 совершать такое же движение вместе с пальцем 23, жестко связанным с гайкой 8.
Формула изобретения
1. Винтовая передача, содержащая корпус с прямолинейными направляющими, размещенный в направляющих с возможностью возвратно-поступательного перемещения подвижный элемент, закрепленный на нем параллельно направляющим и с возмож - ностью вращения ходовой винт, взаимодействующую с винтом гайку с двумя перпендикулярными оси винта опорными плоскостями, жестко закрепленный на корпусе гайкодержатель с двумя опорными плоскостями, параллельными опорным плоскостям гайки, размещенные между опорными плоскостями гайки и гайкодержателя сепараторы с ща- риками, размещенный между гайкодержа- телем и корпусом компенсатор и поводок гайки, включающий жестко связанный с гайкой палец и взаимодействующую с последним закрепленную на корпусе стойку, отличающаяся тем, что, с целью упрощения кон
струкции и повышения КПД и долговеч5
ности, в гайкодержателе выполнен продольный паз, в котором с зазором по периметру размещена гайка, опорные плоскости гайки выполнены в виде двух жестко связанных с ней и охватывающих гайкодержатель фланцев, палец поводка выполнен цилиндрическим и жестко закреплен в одном из фланцев параллельно оси винта, а стойка выполнена в виде охватывающей палец разрезной втулки, связанной с корпусом
фиг. 2 20 5-5
r 20 г 15 g
// н И
7J
7ff
Фиг. 5
25
фиг В
Редактор Н. Горват Заказ 2642/40
Составитель В. Савицкий Техред И. ВересКорректор И. Муска
Тираж 811Подписное
ВНИИПИ Государственного комитета СССР по дс. 1ам нзобретеннй и открытий
I 13035, Москва, Ж-35, Раушская наб.. д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, y,i. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство линейного перемещения исполнительного органа | 1989 |
|
SU1719753A1 |
| Винтовая передача | 1985 |
|
SU1285235A1 |
| Гайка-шарнир | 1986 |
|
SU1388636A1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ УПРУГАЯ ВИНТОВАЯ ПАРА | 2007 |
|
RU2331806C1 |
| ИНСТРУМЕНТ ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ОТВЕРСТИЙ МЕТОДОМ ПОВЕРХНОСТНОЙ ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИИ | 1994 |
|
RU2082591C1 |
| Самоустанавливающаяся ходовая гайка | 2023 |
|
RU2812157C1 |
| Винтовая передача с самоустанавливающейся гайкой | 1987 |
|
SU1474363A1 |
| Зажимное устройство для закрепления изделий | 1972 |
|
SU473340A3 |
| Гайка-шарнир | 1987 |
|
SU1456669A1 |
| ШПИНДЕЛЬ С ЗАЖИМНЫМ ЦЕНТРИРУЮЩИМ ПАТРОНОМ | 2009 |
|
RU2400331C1 |
Изобретение относится к машиностроению, а именно к винтовым передачам высокоточных металлорежущих станков. Цель изобретения - упрощение конструкции и повыщение КПД и долговечности передачи. Для этого гайка 8 размещена в пазу гайкодержателя 17 с зазором по периметру, а количество щариков 21 в сепараторах увеличено. При осевом биении винта 6 торцы гайки 8 с помощью щариков 21 перекатываются по торцам 18, 19 гайкодержателя 17. От проворота гайка 8 удерживается поводком, палец которого запрессован в гайку 8, а втулка с помощью упругих элементов связана с корпусом 1. Упругие элементы позволяют втулке совершать плоскопараллельное перемещение вместе с гайкой 8. 1 з.п.ф-лы. 6 ил. Г 8 8337 ГО I I I i / / СО rsD О СЛ to сриг.1
| Винтовая передача | 1985 |
|
SU1285235A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
