Изобретение относится к магнитным измерениям, в частности к приборам, предназначенным для измерений компонент и полного вектора индукции магнитного поля Земли (МПЗ).
Цель изобретения - повышение достоверности измерений за счет введения в блоки калибровки информации о знаке измеряемого сигнала.
На фиг.1 показана структурная схема одного канала устройства для измерения магнитных полей; на фиг.2 - временные диаграммы работы устройства.
Устройство содержит цифровой вычислительный блок 1, стабилизатор 2 тока, коммутатор 3, последовательно соединенные феррозондовый сравнивающий блок 4 с феррозондовым датчиком, цифровой интегратор 5 и преобразователь 6 кода в постоянный ток, выход которого подключен к компенсационной обмотке феррозондового датчика феррозондового сравнивающего блока 4, контрольная обмотка которого подключена к выходу коммутатора 3, первый и второй аналоговые входы коммутатора 3 соединены соответственно с первым и вторым выходами стабилизатора 2 тока, а первый и второй входы управления - соответственно с выходом триггера 7 и элемента 8 задержки, вход которого соединен с выходом цифрового вычислительного блока 1 и входом синхронизации (С) триггера 7, информационный вход (D) которого подключен к знаковому выходу (sign N) цифрового интегратора 5, присоединенному также к второму входу вычислительного блока 1, к первому входу которого присоединен выход модуля (mod N) цифрового интегратора 5.
Устройство работает в двух режимах: в основном, или рабочем, и в режиме контроля.
В рабочем режиме сигнал "Режим", подаваемый через элемент 8 задержки на второй вход коммутатора 3, отключает подачу тока с выходов стабилизатора 2 тока в контрольную обмотку феррозондового сравнивающего блока 4. В этом случае осуществляется измерение компоненты (B) вектора МПЗ путем преобразования цифровым интегратором 5 разности между измеряемым и компенсирующим магнитными полями на выходе феррозондового сравнивающего блока 4.
С помощью преобразователя 6 кода в ток осуществляется формирование компенсирующего сигнала, подаваемого в компенсационную обмотку феррозондового датчика феррозондового сравнивающего блока 4, пропорционального коду цифрового интегратора 5. В момент полной компенсации измеряемого поля код N в цифровом интеграторе 5 пропорционален величине измеряемого поля B.
N = KB,
где K - коэффициент преобразования компоненты вектора МПЗ.
Измеренное значение кода N, задаваемого модулем (mod N) и знаком (sign N), фиксируется в цифровом вычислительном блоке 1.
Контроль исправности устройства заключается в периодической проверке величины коэффициента K, так как отказ любого входящего узла измерительного канала вызывает изменение величины коэффициента преобразования.
Режим контроля начинается с момента появления сигнала "Режим" в виде логической единицы на выходе цифрового вычислительного блока 1. В момент появления переднего фронта этого сигнала на входе синхронизации (C) триггера 7 в последний по информационному входу (D) записывается содержимое знакового разряда sign N цифрового триггера 5. Во время переключения триггера 7 элементом 8 задержки задерживается появление логической единицы на втором входе управления коммутатора 3. Благодаря этому полностью исключается возможность изменения содержимого знакового разряда от бросков тока на выходе коммутатора в момент переключения триггера 7. Появление логической единицы на втором входе управления коммутатора 3 обеспечивает подачу тока на второй вход феррозондового сравнивающего блока 4 с одного из выходов стабилизатора 2 тока, соответствующих положительному (+) или отрицательному (-) направлению выходного тока Io. Если, например, содержимое триггера 7 соответствует положительному знаку выходного кода цифрового интегратора 5, то на выход коммутатора 3 подается ток отрицательного направления и, наоборот, при отрицательном знаке, хранимом в триггере 7, подается ток положительного направления, т.е. при любом значении знака, записанного и хранимого в триггере 7 в режиме контроля, на второй вход феррозондового сравнивающего блока 4 подается ток, создающий магнитное поле в феррозондовом сравнивающем блоке, противоположное по знаку измеряемому полю. В феррозондовом сравнивающем блоке 4 происходит алгебраическое суммирование измеряемого поля, компенсирующего поля и поля, наводимого эталонным тестовым сигналом. В момент полной компенсации измеряемого и тестового магнитных полей полем компенсационной обмотки происходит запись в цифровой вычислительный блок 1 кода N', равного
Так как в данном устройстве знак тестового приращения  противоположен знаку кода N, то полностью исключается возможность перегрузки измерительного канала или, что то же самое, переполнение цифрового интегратора 5 в режиме контроля.
противоположен знаку кода N, то полностью исключается возможность перегрузки измерительного канала или, что то же самое, переполнение цифрового интегратора 5 в режиме контроля.
Так как  следовательно
следовательно
где Kобм - коэффициент преобразования тока в индукцию магнитного поля контрольной обмотки феррозондового сравнивающего блока 4.
Таким образом, при условии медленного изменения измеряемого поля производится изменение величины B и осуществляется контроль канала измерения путем сравнения кода  с его теоретическим значением No, хранимым в вычислительном блоке 1 или, что то же самое, путем сравнения измеренного значения коэффициента преобразования K с его теоретическим значением Ko.
с его теоретическим значением No, хранимым в вычислительном блоке 1 или, что то же самое, путем сравнения измеренного значения коэффициента преобразования K с его теоретическим значением Ko.
Выбор величины тестового сигнала определяется согласно следующему выражению: ,
,
где Nмакс - код предельно допустимого значения измеряемой величины.
Таким образом, данное устройство обладает простотой и надежностью работы. В нем осуществляется полностью автономное формирование тестового сигнала, адаптивного к измеряемому полю. Для управления формирователем тестового сигнала необходима всего лишь одна шина дистанционной передачи сигнала "Режим".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
| Цифровой феррозондовый магнитометр | 1982 |
|
SU1114997A1 |
| МАГНИТНАЯ ВАРИАЦИОННАЯ СТАНЦИЯ | 1991 |
|
RU2008702C1 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| Феррозондовый компас | 1987 |
|
SU1569547A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |

Изобретение относится к приборам для измерения компонент и полного вектора индукции поля Земли. Цель изобретения - повышение достоверности измерения. Устройство содержит цифровой вычислительный блок 1, стабилизатор 2 тока, коммутатор 3, феррозондовый сравнивающий блок 4 с феррозондовым датчиком, цифровой интегратор 5 и преобразователь 6 кода в постоянный ток. Введение триггера 7, элемента 8 задержки и образование новых функциональных связей позволяют осуществить полностью автономное формирование тестового сигнала, адаптивного к измеряемому полю. Для управления формирователем тестового сигнала необходима всего лишь одна шина дистанционной передачи сигнала "Режим". 2 ил.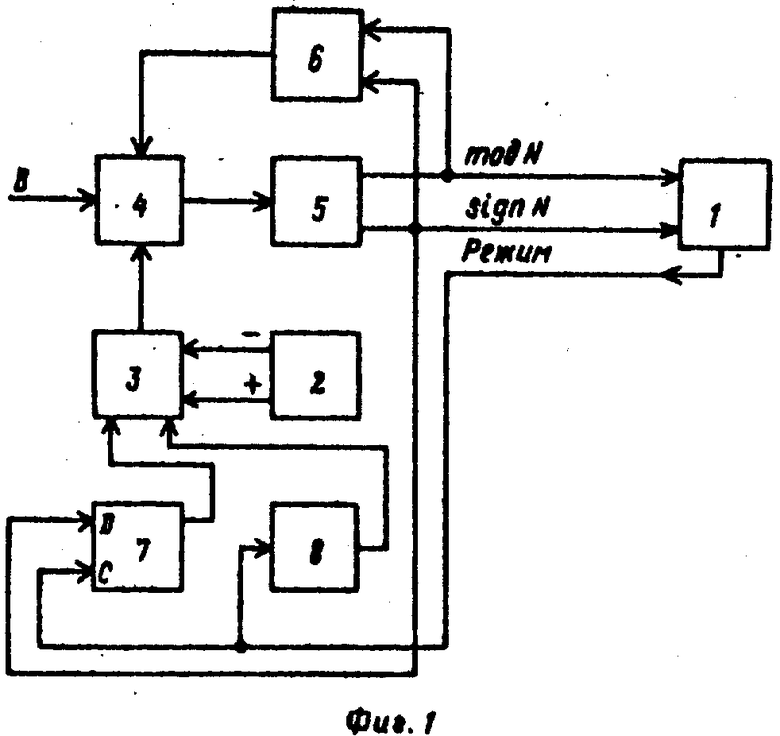
Устройство для измерения магнитных полей, содержащее цифровой вычислительный блок, стабилизатор тока, коммутатор, последовательно соединенные феррозондовый сравнивающий блок с феррозондовым датчиком, цифровой интегратор и преобразователь кода в постоянный ток, выход которого подключен к компенсационной обмотке феррозондового датчика феррозондового сравнивающего блока, первый и второй выходы цифрового интегратора подключены к входам цифрового вычислителя, а выход коммутатора подключен к контрольной обмотке феррозондового датчика феррозондового сравнивающего блока, отличающееся тем, что, с целью повышения достоверности измерений, в него дополнительно введены триггер и элемент задержки, причем первый и второй выходы стабилизатора тока подключены соответственно к первому и второму аналоговым входам коммутатора, выход которого соединен с контрольной обмоткой феррозондового сравнивающего блока, первый и второй входы управления коммутатора соединены соответственно с выходом триггера и выходом элемента задержки, вход которого соединен с выходом цифрового вычислителя и входом синхронизации триггера, информационный вход которого соединен с выходом знакового разряда цифрового интегратора.
| Устройство для ввода аналоговых величин в цифровую вычислительную машину | 1977 |
|
SU708341A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Феррозондовый магнитометр | 1980 |
|
SU930176A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
