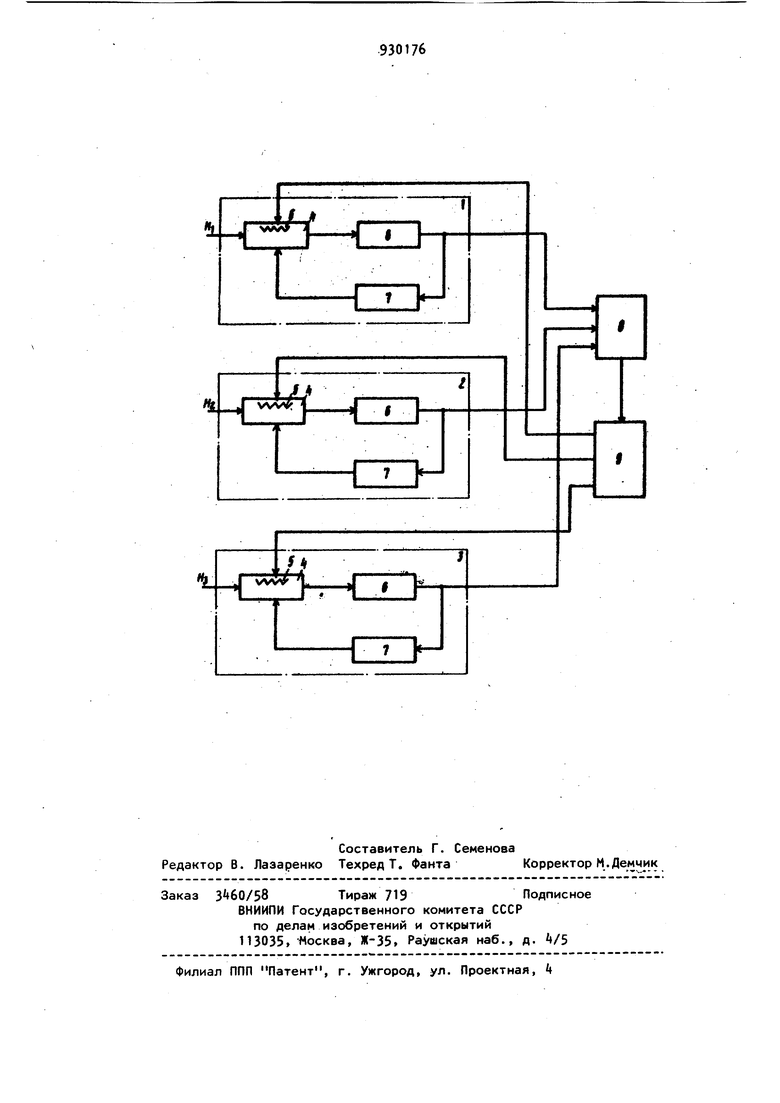
Изобретение относится к геофизическому приборостроению, а точнее к магнитометрам, предназначенным для измерений компонент и полного вектора напряженности магнитного поля Земли (МПЗ). Известны феррозондовые магнитомет ры компенсационного типа, содержащее терхкомпонентный феррозондный датчик устройства выделения и преобразования , элементы цепи обратной связи и регулирующий прибор { J. Трехкомпонентные магнитометры позволяют измерять компоненты вектора индукции магнитного поля Земли. В настоящее время эти устройства находят широкое применение в автономных измерительных системах получения информации о составляющих вектора индукции магнитного поля Земли. Недостатками этих устройств являются невозможность обеспечения непре рывной выдачи информации о величине модуля вектора индукции магнитного ПОЛЯ Земли, отсутствие автоматического непрерывного контроля и малая глубина контроля исправности. Известны также устройства, содержащие цифровые, аналого-цифровые и цифро-аналоговые преобразователи, в которых осуществляется автоматическая тестовая проверка исправности преобразователей путем передачи через цепь этих последовательно соединенных преобразователей тестового сигнала при отключенном входном измеряемом сигнале 2j. Недостатком таких устройств являются прерывание измерения входного сигнала датчика во время контроля, отсутствие контроля неисправности самих датчиков и сравнительно большие аппаратурные затраты на реализацию контроля. Наиболее близким по технической сущности к изобретению является цифровой феррозондовый магнитометр для измерения трех взаимно перпендикулярнух составляющих вектора напряженности магнитного поля, который имеет три измерительных канала, представляющих собой аналого-цифровые преобразователи следящего последовательного уравновешивания,основными узлами которых являются феррозондовое сравнивающее устройство (ФСУ), устройство управления, представляющее собой цифровой интегратор, выполненный на реверсивном счетчике, и преобразователь кода в постоянный компенсирующий ток. В зависимости от формы выхоженного сигнала феррозондовые сравнивающие устройства могут быть с выходом в виде постоянного напряжения.или с частот,ньуи выходом . Каждый канал измерения работает следующим образом. При наличии разности между измеряемым и компенсирующим магнитными полями на выхЬде феррозондового сравнивающего устройства появляется величина рассогласования, которая цифровым интегратором.преобразуется в код. Преобразователь кода в ток, управляемый цифровым интегратором,, формирует постоянный ток, пропорциональный коду, подаваемый в компенсационную-обмотку феррозондового сравнивающего устройства и создающий там поле компенсации. . В момент полной компенсации измеряемого поля компенсирующим код цифрового интегратора равен величине компоненты вектора напряжённости магнитного поля. Код цифрового ратора поступает на регистрирующее устройство. Цифровой магнитометр сле. дящего уравновешивания имеет высокие метрологические характеристики. Однако недостатками-известного устройства являются отсутствие непре рывной выдачи информации о самой вел чине модуля вектора напряженности ма нитного поля Земли, отсутствие автом тического непрерывного контроля и ма лая глубина контроля неисправности. Цель изобретения - повышение точности и быстродействия измерений. Поставленная цель достигается тем что в феррозондовый магнитометр, содержащий три измерительных канала, каждый из которых выполнен в виде по ледовательно соединенных феррозондового сравнивающего блока с феррозондовым датчиком, цифрового интегратора и преобразователя кода в постоянный ток, выход которого подключен к компенсационной обмотке датчика феррозондового сравнивающего блока, дополнительно введены цифровой вычисли тель, управляемый преобразователь ко да в ток, а в каждый датчик феррозондового сравнивающего блока введена контрольная обмотка, причем выходы цифровых интеграторов подключены ко входам цифрового вычислителя, выход которого подключен ко входу управляемого преобразователя кода в ток, первый, второй и третий выходы которого подключены, соответственно к контрольным обмоткам первого, второго и третьего феррозондовых сравнивающих блоков. На чертеже показана структурная схема предлагаемого феррозондового магнитометра. феррозондовый магнитометр состоит из трех измерительных каналов 1, 2 и 3, каждый из которых содержит последовательно включенные феррозондовый 1сравнивающий блок с контрольной обмоткой 5 феррозондового датчика,цифровой интегратор 6 и преобразователь 7. Выходы цифровых интеграторов 6 подключены ко входу цифрового вычислителя 8, выход которого подключен ко вхоДУ управляемого преобразователя 9 кода в ток. Три выхода управляемого преобразователя 9 кода в ток подключены к контрольным обмоткам 5 феррозондового датчика каждого .из каналов 1, 2 и 3. Устройство работает в следующих двух режимах: в основном или рабочем и в режиме контроля. В рабочем режиме осуществляется измерение модуля вектора, напряженности магнитного поля Земли. Каждая компонента Н вектора измеряется соответствующим измерительным каналом 1, 2, 3 (5 1)2, 3 обознач чает номер канала) путем преобразования цифровым интегратором разности между измеряемым и компенсирующим магнитными полями на выходе феррозондового сравнивающего устройства в виде величины рассогласования в код. В зависимости от типа выбранного феррозондового сравнивающего устройства величина рассогласования может быть в виде частоты повторения импульсов или в виде постоянного напряжения. 3 первом случае интегрирование величины рассогласования осуществляется путем подсч.ета импульсов на реверсивном счетчике цифрового 5 интегратора 6, во втором случае в цифровом интеграторе 6 осуществляется предварительное преобразование выходного ..аналогового сигнала феррозондового сравнивающего блока k в частотно-импульсную форму. В момент полной компенсации измеряемого поля компенсирующим (т.е. в .момент равенства их абсолютных величин) , код N с цифрового интегратора 6 пропорционален величине соответствующей компоненты вектора напряженности МПЗ. В цифровом вычислителе 8 определя ется код величины модуля вектора напряженности МПЗ путем вычисления сле дующей зависимости н .7 , 1 где N , Н . N K.H,- ко ды компонент вектора МПЗ; К , К, коэффициенты преобра зования компонент вектора МПЗ. Благодаря высокой скорости вычислительного процесса, обеспечиваемого цифровым вычислителем 8, осуществляется непрерывный процесс измерения модуля вектора МПЗ и выдача результа та потребителям1 Контроль исправности устройства з ключается в периодической проверке величин коэффициентов К, К-, К« так /как отказ любого входящего узла изме рительного канала 1,2, 3 вызывает изменение величины соответствующего коэффициента передачи. Контроль устройства осуществляетс следующим образом. В цифровом вычислителе 8 формируются тестовые эталонные сигналы в виде знакопеременных кодов tN 0,1, ±N 0,2,i:N 0,3, подаваемые через управляемый преобразователь 9 кода в ток соответственно в обмотки 5 ферро зондовых сравнивающих блоков . За полный период (такт) контроля каждого измерительного канала 1, 2, 3 подача тестовых сигналов осуществляется два раза. В течение первого полупериода подается, например, положительный тесто вый сигнал (NO.,) , во втором полупериоде - отрицательной полярности (,I) При этом в соответствующей контрольной обмотке 5 датчика феррозондового сравнивающего блока наводится магнитное поле в зависимости от полярности измеряемой компоненты поля, в одном полупериоде совпадающее 66 по знаку с измеряемым, а в другом противоположное по знаку, В том и другом случаях происходит алгебраическое суммирование измеряемого поля, компенсирующего и поля, наводимого эталонным тестовым сигналом. В момент полной компенсации измеряемого и тестового магнитных полей полем компенсационной обмотки в обоих полупериодах контрольного такта происходит запись в цифровой вычислитель 8 величин и соответствующего им измерительного канала. Результаты измере-. НИИ и N, соответствующие первому и второму полупериодам контрольного такта, можно представить в следующем виде ,,K,-Ko5.iNo : N; Ni NoH-N -NK,K ПКТ ОбГАЛ 0,1, ,,.,1 м NO ---К -XПКТ результаты преобразования тестовых сигналов соответствующего им измерительного канала в первом и втором соответственно полупериоде контрольного такта; {1КТ коэффициент преобразования управляемого преобразователя 9 кода в ток;, oSTM-j коэффициент преобразования тока в напряженность магнитного поля контрольной обмотки 5 соответствующего ей измерительного канала 1, 2, 3 (эта величина практически одинакова и постоянна во всех контрольных обмотках), Путем суммирования и вычитания величин N и N в цифровом вычислителе 8 осуществляется разделение измеряемой к контрольной величин . N.--N; - J/ .V f Vl i niaoBM 0,11 ткуда i IK ПКТ OBNM-NO, Таким образом, при условии медленого изменения измеряемого поля (что ыполнимо в реальных условиях) одноременно проводится измерение величиы Н и осуществляется контроль канаов измерения путем сравнения кодов и или, что то же самое, пу тем сравнения измеренных значении коэффициентов преобразования К измерительных каналов 1,2, 3 с теоретическим значением, хранимом в цифровом вычислителе. В данном устройстве контроль измерительных каналов 1, 2, 3 можно проводить как путем последовательной, Tcik и путем одновременной подачи тестовых сигналов во все контрольные обмотки 5 фазосдвигающих сравнивающих блоков 4, ,Кроме того, имеется возможность выбора (программным способом) в прбцессе работы оптимального значения величин тестовых сигналов в зависимости от текущего значения измеряемой величины МПЗ, при этом величины тес-г товых сигналов должны удовлетворять следующему требованию - N «кc-N, /VVQKC- °f предельно допустимого значения измеряемой величины МПЗ. Математическая задача, включающая операции вычисления вектора МПЗ, при ма и выдачи информации, формирования тестовых кодов и измерение коэффициентов преобразования каналов выпол нима любым вычислителем, выполненным по стандартной структуре, включающей устройства ввода-вывода, арифметикологическое, запоминающее и устройство управления. Кроме того, возможен использования специализированного микр процессора, выполненного н.а наборе стандартных микросборок. Для выполнения предназначенных функций управляемый преобразователь S кода в ток содержит стандартный преобразователь кода в ток и коммута тор каналов. Возможность автоматического измерения коэффициентов преобразования К каналов 1, 2, 3 в свою очередь обеспечивает возможность автоматизации процесса регулировки в нормальны климатических условиях, что значительно может повысить производитель68ность работы при серийном выпуске изделий, содержащих эти устройства,и производительность регламентных работ . Математические возможности цифрового вычислителя позволяют также обеспечить автоматическую коррекцию -коэффициентов преобразования путем фд,{эмирования корректирующих поправок, вносимых в процессе вычисления модуля вектора напряженности МПЗ. Формула изобретения Феррозондовый.магнитометр, содержащий три измерительных канала, каждый из которых выполнен в виде последовательно соединенных феррозОндового сравнивающего блока с феррозондовым датчиком, цифрового интегратора и преобразователя кода в постоянный ток, выход которого подключен к компенсационной обмотке датчика феррозондового сравнивающего блока, о тличающийся тем, что, с целью повышения точности и быстродействия измерений, дополнительно введены цифровой вычислитель, управляемый преобразователь кода в ток, а в каждый датчик феррозондового сравнивающего блока введена контрольная обмотка, причем выходы цифровых интеграторов подключены ко входам цифрового вычислителя, выход которого подключен ко входу управляемого преобразователя кода в ток, первый, второй и третий выходы которого подключены соответственно к контрольным обмоткам первого, второго и третьего феррозондовых сравнивающих блоков. Источники информации, принятые во внимание при экспертизе 1.Логачев А.А. и др. Магниторазведка. Л., Недра, 1979, с. 79-852.Авторское свидетельство СССР ff , кл. G Об F З/О, 1977. 3.Семенов Н.М., Яковлев Н.И. Цифровые феррозондовые магнитометры. Л., Энергия, 1978, с. 130-136.
О
GIH
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1985 |
|
SU1321242A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
| Цифровой феррозондовый магнитометр | 1982 |
|
SU1114997A1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| Цифровой феррозондовый магнитометр | 1980 |
|
SU920594A1 |
| Способ определения допустимости использования феррозонда в магнитометре | 2020 |
|
RU2749303C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2302615C1 |
K f-CZIF
-ни:
ч:
vvvv
