13
Изобретение относится к измерительной технике и может быть использовано при измерении угловьк перемещений, например, рабочих органов роботов или станков-автоматов в диапазоне от О до 360.
Цель изобретения - расширение диапазона измерения при сохранении линейности функции преобразования за счет соответствующего профилирования электродов емкостного датчика.
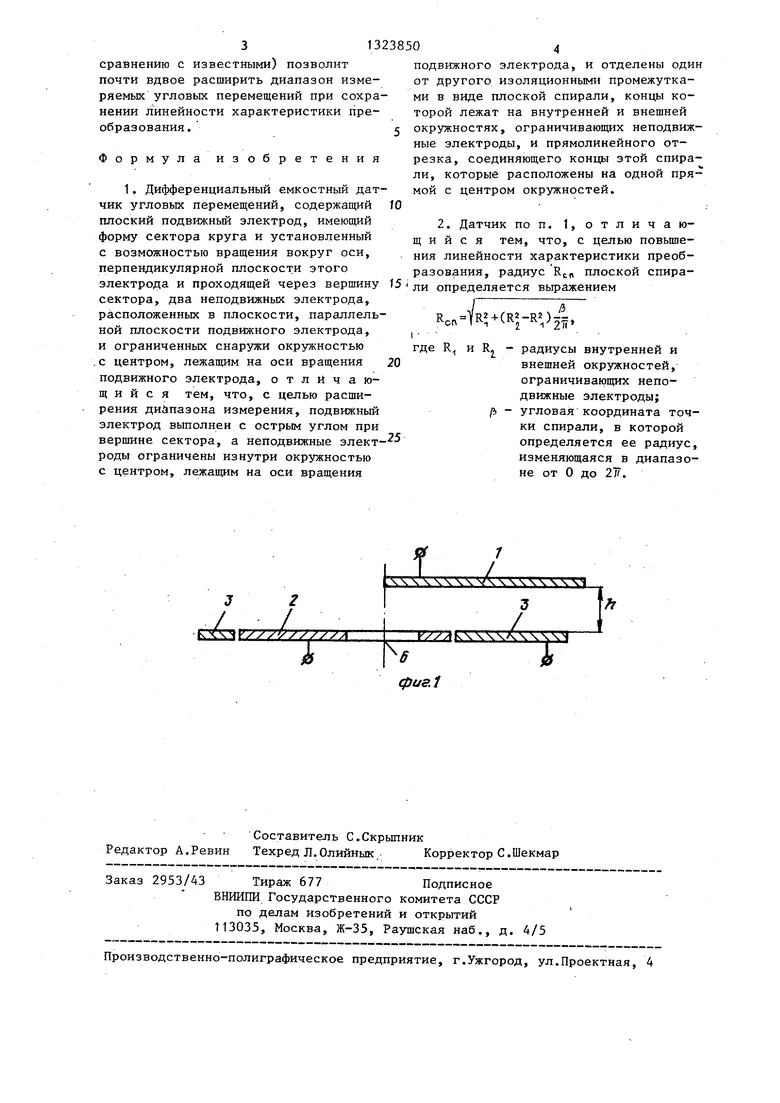
На фиг. 1 изображен дифференциальный емкостный датчик угловых перемещений, продольное сечение; на фиг. 2 - то же, вид сверху.
Дифференциальньв емкостный датчик угловых перемещений содержит плоский подвршньй электрод 1, имеющий форму сектора круга с острым углом при вершине, и два неподвижных электрода 2 и 3, расположенных в плоскости, параллельной плоскости подвижного электрода.
Неподвижные электроды 2 и 3 ограничены изнутри и снаружи окружностями .4 и 5 с центром, лежащим на .оси 6 вращения подвижного электрода, перпендикулярной его плоскости и проходящей через вершину сектора. Изоля
функции преобразования нарушается только в случае, когда подвижный
циопный промежуток, отделяющий непо- электрод находится над прямолинейным
движные электроды 2 и 3 .один от другого, выполнен в виде плоской спирали 7, концы 8 и. 9 которой лежат соответственно на внутренней А и внешней 5 окружностж, ограничивающих неподвижные электроды, и имеет прямо линейный участок 10 в виде отрезка, соединяющего концы 8 и 9 спирали 7.
Для получения линейной функции преобразования необходимо, чтобы радиус R плоской спирали, разделяющей неподвижные электроды 2 и 3, описывался, например, следующим математическим выражением
35
40
участком 10, разделяющим неподвижные электроды 2 и 3. Поэтому диапазон измеряемых при помощи предлагаемого датчика перемещений равен (),, где Cf- угол при вершине сектора подвижного электрода 1, который реаль-- но может составлять 300-350 .
При включении емкостного датчика в схему измерения, например мос-Говую или компенсаи юнно-мостовую измерительную цепь, реализующую одну из следующих функций Р- преобразования, где ,2,3: -С.
Л
Ron-VR 4R|-R,)ff,
(1)
где R и R - радиусы соответственно внутренней и внешней окружностей, ограничивающих неподвижные электроды;
|3 угловая координата точки спирали, в которой определяется ее радиус,
50
р -..1.....
,,.,
рз с;:7с-;.7
получают линейную зависимость выходного сигнала от измеряемого углового перемещения, инвариантную к значению
изменяющаяся в диапазо- 55 Диэлектрической проницаемости среды, не от О до 2.зазору между электродами и температурДифферен ц 1альный емкостный датчик ным изменениям их активной площади, угловых перемещений работает следую- Использование предлагаемого диффе щим образом..ренщ1ального емкостного датчика (по
При изменении углового положения с подвижного электрода 1, вращающегося относительно своей вершины в плоскости., параллельной плоскости неподвижных электродов 2 и 3, происходит изменение площади их взаимного перекрытия. Так как неподвижные электроды ограничены концентрическими окружностями, центр которых лежит на оси вращения подвижного электрода, то сум- ма активных площадей неподвижных электродов и сумма частичных емкостей - Зч между соответствующими электродами датчика сохраняет свае значение независимо от углового положения 0 подвижного электрода 1. Перемещение подвижного электрода 1 благодаря спиралевидной форме границы раздела между неподвижными электродами 2 и 3 приводит к однозначному увеличению одной частичной емкости за счет уменьшения другой, что определяет дифференциальный закон изменения частичных емкостей в датчике с переменной активной площадью электродов. Монотонность изменения частичных емкостей, а следовательно, и
функции преобразования нарушается только в случае, когда подвижный
35
40
45
участком 10, разделяющим неподвижные электроды 2 и 3. Поэтому диапазон измеряемых при помощи предлагаемого датчика перемещений равен (),, где Cf- угол при вершине сектора подвижного электрода 1, который реаль-- но может составлять 300-350 .
При включении емкостного датчика в схему измерения, например мос-Говую или компенсаи юнно-мостовую измерительную цепь, реализующую одну из следующих функций Р- преобразования, где ,2,3: -С.
50
1-1
р -..1.....
,,.,
рз с;:7с-;.7
получают линейную зависимость выходного сигнала от измеряемого углового перемещения, инвариантную к значению
сравнению с известными) позволит почти вдвое расширить диапазон измеряемых угловых перемещений при сохранении линейности характеристики преобразования.
Формула изобретения
1, Дифференциальный емкостный датчик угловых перемещений, содержащий плоский подвижный электрод, имеющий форму сектора круга и установленный с возможностью вращения вокруг оси, перпегадикулярной плоскости этого электрода и проходящей через вершину сектора, два неподвижных электрода, расположенных в плоскости, параллельной плоскости подвижного электрода, и ограниченных снаружи окружностью .с центром, лежащим на оси вращения подвижного электрода, о т л И ч а ю- щ и и с я тем, что, с целью расщи- рения диапазона измерения, подвижный электрод вьшолнен с острым углом при вершине сектора, а неподвижные элект роды ограничены изнутри окружностью с центром, лежащим на оси вращения
Составитель С.Скрьшник Редактор А.Ревин Техред Л.Олийнык, Корректор С.Шекмар
Заказ 2953/43 Тираж 677Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий t13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
подвижного электрода, и отделены один от другого изоляционными промежутками в виде плоской спирали, концы которой лежат на внутренней и внешней окружностях, ограничивающих неподвижные электроды, и прямолинейного отрезка, соединяющего концы этой спирали, которые расположены на одной прямой с центром окружностей.
/О 0
2. Датчик по п. 1, отличающийся тем, что, с целью повьш1е- ния линейности характеристики преобразования, радиус Rtn плоской спира- 5 ли определяется вьфажением
/О20
R
on
1/R2 +
/3
(
где R и Rj Л 25
2н
радиусы внутренней и внешней окружностей, ограничивающих неподвижные электроды; угловая координата точки спирали, в которой определяется ее радиус, изменяющаяся в диапазоне от О до 27.
Г
фие.1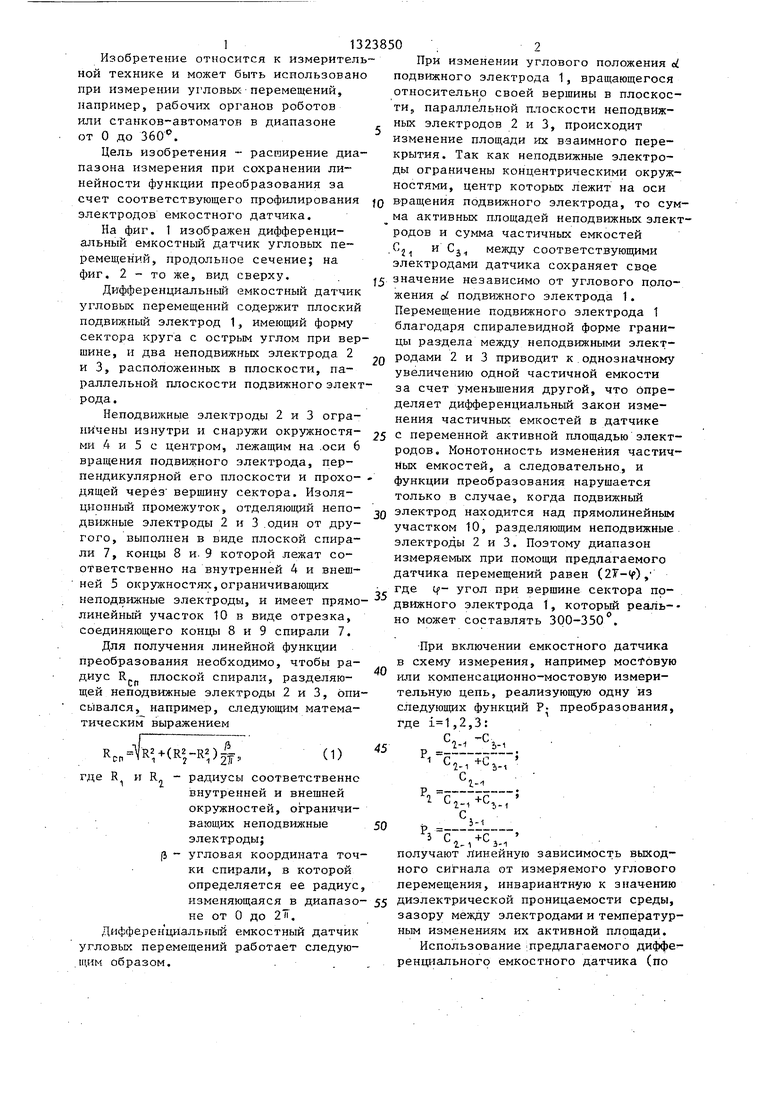
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКРЕМЕНТНЫЙ ЕМКОСТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2427794C1 |
| Дифференциальный емкостный преобразователь углового перемещения | 1990 |
|
SU1838755A3 |
| Дифференциальный емкостной преобразователь углового перемещения | 1990 |
|
SU1775037A3 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2000 |
|
RU2166762C1 |
| Дифференциальный емкостный преобразователь перемещений | 1988 |
|
SU1599644A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| ДАТЧИК ДАВЛЕНИЯ | 2000 |
|
RU2240521C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| Емкостной датчик угловых перемещений | 1988 |
|
SU1596210A2 |
| Емкостный дифференциальный датчик перемещений | 1988 |
|
SU1504493A1 |
Изобретение относится к измерительной технике и имеет целью расширение диапазона измерений при сохранении линейности и однозначности функции преобразования дифференциального емкостного датчика угловых перемещений, ПОДВИЖНЕЙ электрод 1 которого выполнен в форме остроугольного сектора, а неподвижные электроды 2. и 3 ограничены изнутри окружностью с центром, лежащим на оси 6 вращения по- движного электрода. Неподвижные электроды отделены один от другого изоляционным промежутком в виде плоской спирали 7, концы которой лежат соответственно на внутренней 4 и внешней 5 окружностях, ограничивающих неподвижные электроды, и участком 10 в виде отрезка, соединяющего концы 8 и 9 этой спирали, лежащие на одной прямой с центром указанных окружностей. При вращении подвижного электрода 1 вокруг оси 6, перпендикулярной его плоскости, происходит изменение площади взаимного перекрытия этого электрода и неподвижных электродов 2 и 3. Благодаря спиралевидной форме изоляционного промежутка между неподвижными электродами 2 и 3, описьшае- мой соответствующим математическим выражением, происходит однозначное линейное изменение частичных емкостей между ними и подвижным электродом датчика. 1 з.П. ф-лы. 2 ил. с S (Л со ю со 00 ел
| Ацюковский В.А | |||
| Емкостные преоб- разователи перемещений | |||
| К | |||
| - Л.: Энергия, 1966, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
