Заявленное техническое решение относится к измерительной технике и может быть использовано для измерения угловых перемещений (поворотов), с помощью преобразователя перемещения индукционного типа.
Известен «Бесконтактный датчик положения с взаимной индуктивностью» по патенту Франции: FR 2830614 А1 от 11.04.2003 г., МПК G01D 5/22 - [1], содержащий нанесенные печатные прямоугольные обмотки на пластинах из диэлектрического материала, рядом с обмотками находятся пластины из материала с высокой магнитной проницаемостью и ферромагнитные площадки, между которыми находится перемещаемый магнит, положение которого определяется по возмущению электромагнитного поля между ферромагнитными площадками.
Недостатком известного изобретения является то, что печатные обмотки связаны через магнитный контур, магнитная проницаемость материала которого очень сильно зависит от температуры, что требует усложнения конструкции датчика, введением температурной компенсации. Кроме того, наличие магнитного контура позволяет использовать только низкий диапазон рабочих частот, что также снижает точность измерения.
Аналогом предложенного технического решения также является «Индуктивный датчик положения (варианты)» по патенту США: US 6605939 (В1), от 12.08.2003, МПК G01D 5/20 - [2]. Индуктивный датчик [2] в варианте для измерения углового положения содержит плоские неподвижную часть и подвижную части датчика установленные с общей осью вращения относительного друг друга, неподвижная часть выполнена в виде пластины с нанесенной на ее поверхность по дугам окружности и радиусам спиралеобразной печатной плоской катушки индуктивности, а неподвижная часть содержит кольцеобразные ферромагнитные вставки, расположенные потому же радиусу, что печатная плоская катушка индуктивности неподвижной части. При взаимном угловом смещении подвижной и неподвижной частей датчика углового положения изменяется индуктивность катушки, по которой (значению индуктивности) измеряют угловое положение.
Недостатком аналога [2] является то, что подвижная часть датчика выполнена из ферромагнитного материала, магнитная проницаемость которого очень сильно зависит от температуры, что требует усложнения конструкции датчика, введением температурной компенсации. Кроме того, наличие магнитного контура в измерительной катушке индуктивности позволяет использовать только низкий диапазон рабочих частот, что также снижает точность измерения.
Известен «Индукционный датчик положения» по патенту РФ: RU 2454625 от 27.06.2012 года, МПК8 G01B 7/00, G01D 5/20 - [3], содержащий неподвижную часть и подвижную часть датчика, выполненные в виде пары плоских катушек из диэлектрического материала, обращенных друг к другу сторонами с нанесенными на них печатными зигзаго-подобными прямоугольными плоскими катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть, установлена с возможностью перемещения с одной степенью свободы относительно неподвижной части вдоль активных длинных проводников зигзаго-подобных прямоугольных катушек. Причем неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
Недостатком известного аналога [3] является то, что он может быть использован только для измерения линейных перемещений (положений) объекта и не может быть использован для измерения его угловых положений.
Также известен «Индукционный датчик положения» по патенту РФ: RU 2507474 от 20.02.2014 года, МПК8 G01B 7/00, G01D 5/20 - [4], содержащий неподвижную и подвижную части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Индукционный датчик положения содержит вторую, аналогичную первой, пару плоских катушек с длинной неподвижной и короткой подвижной катушками, при этом длина неподвижной катушки больше длины подвижной катушки для всего диапазона ее перемещения, подвижные плоские катушки обеих пар разделены и жестко связаны между собой, ко второй неподвижной длинной катушке подведено питание от генератора синусоидального сигнала, подвижные катушки обеих пар соединены между собой проводниками.
Изобретение решает задачи существенного повышения надежности датчика, за счет применения второй пары катушек, используемой как питающий трансформатор.
Недостатком аналога [4], как и аналога [3], является то, что с его помощью нельзя мерить угловые величины.
Прототипом предложенного технического решения является «Индукционный датчик углового положения» по патенту РФ: RU 2502046 от 20.12.2013 года, МПК8 G01B 7/00 - [5]. содержащий установленные с общей осью вращения относительно друг друга с одной степенью свободы плоские неподвижную и подвижные части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими катушками индуктивности, при этом печатные плоские катушки выполнены зигзагоподобными, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками. Подвижная и неподвижная части могут содержать по одной идентичной катушке, которые расположены в секторе с углом, меньшим или равным 180°, причем в первоначальном положении датчика катушки смещены относительно друг друга на угол, равный половине угла сектора расположения катушек. Неподвижная часть датчика может содержать две идентичные катушки, расположенные в секторах с углом, меньшим или равным 180°, а подвижная часть датчика содержит одну аналогичную катушку, которая в первоначальном положении датчика смещена относительно двух катушек неподвижной части датчика на угол, равный половине угла секторов их расположения. Неподвижная часть датчика может содержать четное число N идентичных катушек, расположенных равномерно в равных секторах, а подвижная часть датчика содержит в два раза меньше - N/2 идентичных катушек, расположенных в аналогичных секторах через один, при этом сектора расположения катушек неподвижной и подвижной частей датчика в его первоначальном положении смещены относительно друг друга на угол, равный половине угла секторов, при этом в неподвижной части датчика катушки, расположенные в секторах через один, соединены между собой последовательно с образованием двух катушек индуктивности, а в подвижной части датчика катушки соединены между собой последовательно с образованием одной катушки индуктивности. Изобретение решает задачи расширения диапазона измерений, упрощения конструкции датчика и повышения точности измерений.
Недостатком прототипа [5] является то, что он не позволяет отслеживать углы поворота, равные или больше 180°. Это существенно усложняет приборы для считывания информации об угле поворота.
Заявленное техническое решение решает задачу расширения диапазона измерения углов поворота прототипа больше 180° (от 0° до 360°).
Сущность изобретения заключается в том, что индукционный датчик углового положения, содержащий установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижную и подвижную плоские пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками, при этом датчик содержит две пары неподвижных и подвижных пластин, содержащих по две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, подвижные пластины жестко установлены на одном валу вращения, в одной паре пластин неподвижная и подвижные катушки расположены симметрично, а в другой паре пластин неподвижная и подвижные катушки смещены на угол, равный 90°, при этом на каждой пластине, соответственно расположенные на них две катушки соединены между собой последовательно и встречно. Все пластины индукционного датчика углового положения с печатными катушками имеют идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек. В индукционном датчике углового положения пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий. Индукционный датчик углового положения снабжен вращающимся трансформатором, подвижная обмотка которого закреплена на валу вращения и подсоединена к зигзагоподобным катушкам индуктивности подвижных пластин датчика. Вращающийся трансформатор может быть выполнен в виде неподвижной и подвижной плоских пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими спиралеобразными катушками.
Так, например, два самых простых варианта расположения катушек пластин следующие:
1. Рисунки катушек неподвижных пластин расположены симметрично (параллельно), а рисунки катушек подвижных пластин смещены относительно друг друга на угол 90° (расположены ортогонально);
2. Рисунки катушек неподвижных пластин смещены относительно друг друга на угол 90° (расположены ортогонально), а рисунки катушек подвижных пластин расположены симметрично (параллельно).
Техническим результатом заявляемого изобретения является расширение диапазона измерения датчика углового положения до 360°.
Введение отличительных признаков: «датчик содержит две пары неподвижных и подвижных пластин, содержащих по две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, подвижные пластины жестко установлены на одном валу вращения, в одной паре пластин неподвижная и подвижные катушки расположены симметрично, а в другой паре пластин неподвижная и подвижные катушки смещены на угол, равный 90°» необходимо для расширения диапазона измерения датчика углового положения до 360°.
Введение отличительного признака: «на каждой пластине, соответственно расположенные на них две катушки соединены между собой встречно-последовательно» необходимо для обеспечения снятия с каждой пары пластин суммированного (дифференциального) сигнала, соответствующего угловому смещению вала вращения.
Введение отличительного признака: «все пластины с печатными катушками индукционного датчика углового положения могут иметь идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек» необходимо для того, чтобы точно зеркально совместить печатные катушки в неподвижных и подвижных пластинах при их монтаже. Для этого при проектировании печатных катушек с высокой точностью задаются координаты их совмещения, в виде отметок под отверстия. После изготовления пар неподвижных и подвижных пластин и сверления в них реперных отверстий, в процессе изготовления индукционного датчика углового положения добиваются полного совмещения печатных катушек пар пластин оптическим или механическим методом. При механическом методе совмещения используют штифты, диаметр которых соизмерим с диаметром реперных отверстий. Далее при закреплении пластин (их фиксации) пластин штифты снимают.
Введение отличительного признака: «пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий» необходимо для повышения точности преобразования сигналов за счет исключения краевых эффектов от пассивных коротких проводников. То есть, данное конструктивное решение исключает геометрическую асимметрию двух печатных катушек всех пластин и снижает влияние электромагнитного поля коротких проводников с током на длинные проводники, расположенные по окружности.
Введение отличительного признака: «Индукционный датчик углового положения… снабжен вращающимся трансформатором, подвижная обмотка которого закреплена на валу вращения и подсоединена к зигзагоподобным катушкам индуктивности подвижных пластин датчика» необходимо для обеспечения функционирования датчика не только при периодических угловых отклонениях 360° его подвижных пластин, но и при их вращении.
Введение отличительного признака: «вращающийся трансформатор… выполнен в виде неподвижной и подвижной плоских пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими спиралеобразными катушками индуктивности» необходимо для существенного упрощения вращающегося трансформатора для питания печатных катушек поворотных пластин датчика. Плоские пластины со спиралеобразными катушками индуктивности вращающегося трансформатора могут быть выполнены по технологии изготовления неподвижных и подвижных пластин датчик, что существенно снизит стоимость всего устройства.
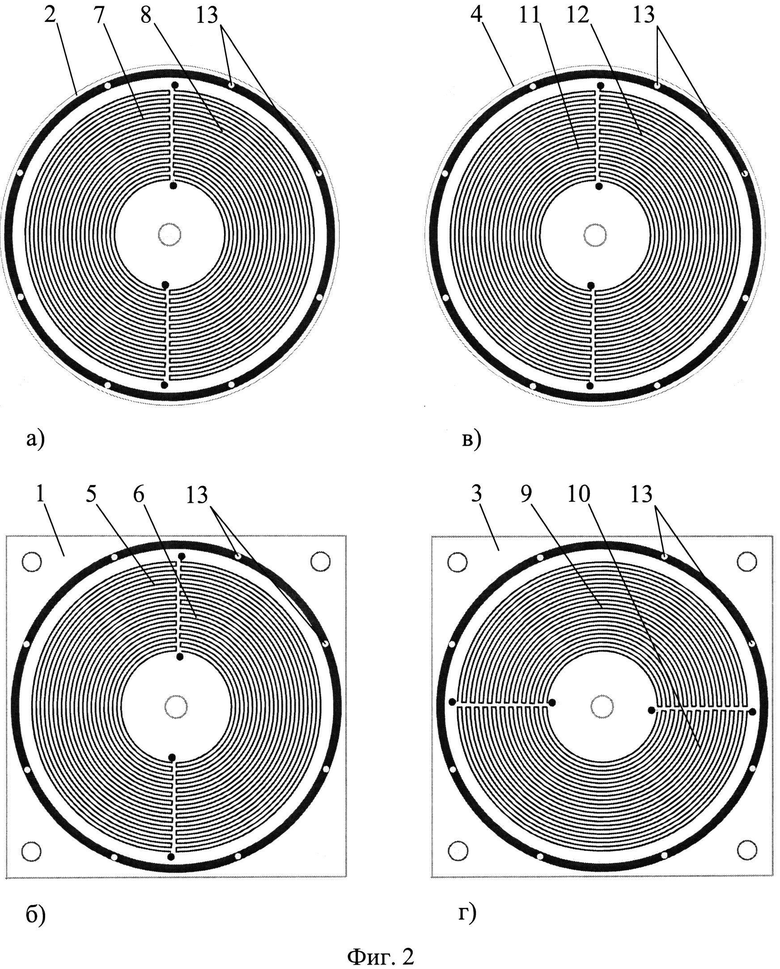
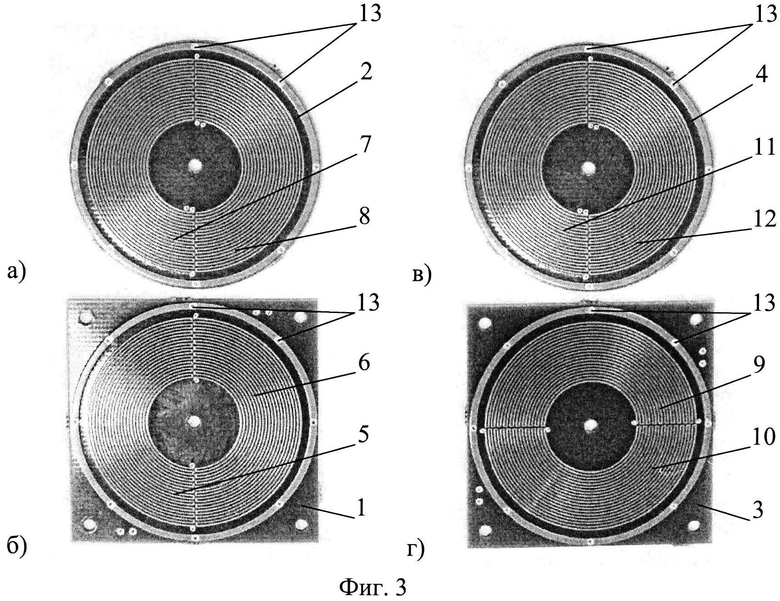
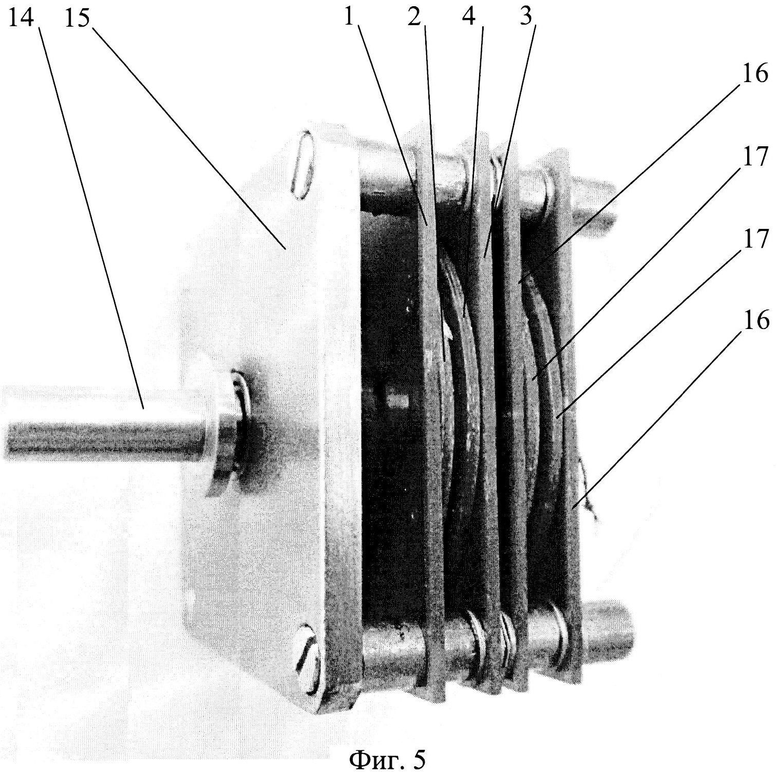
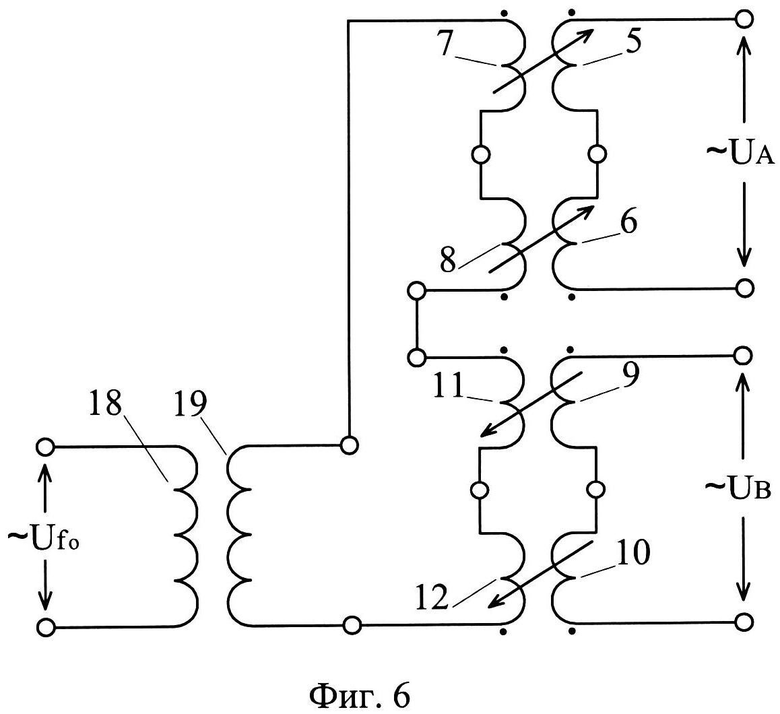
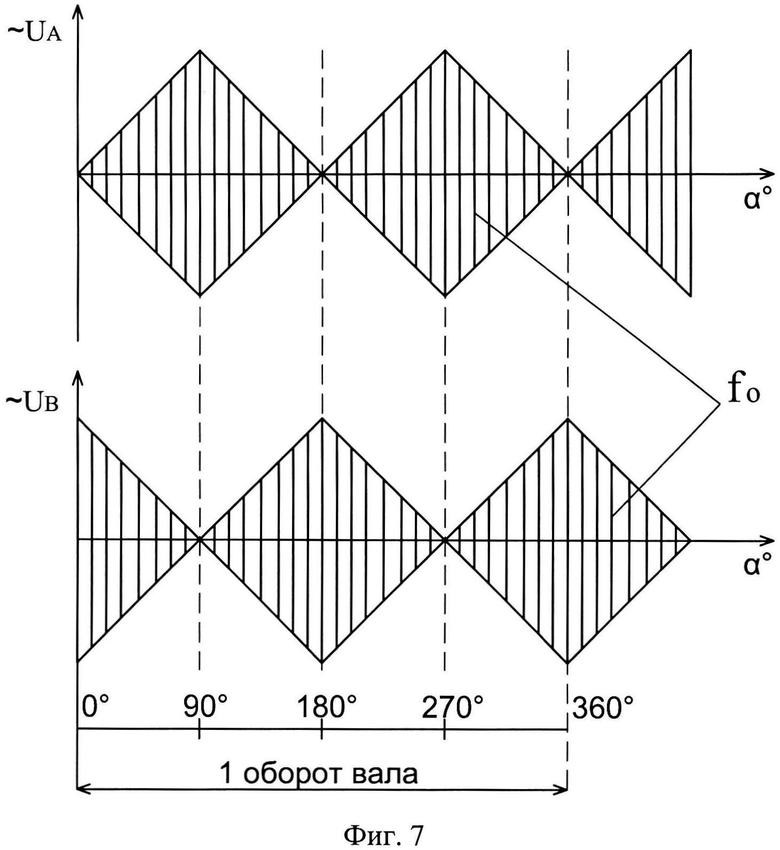
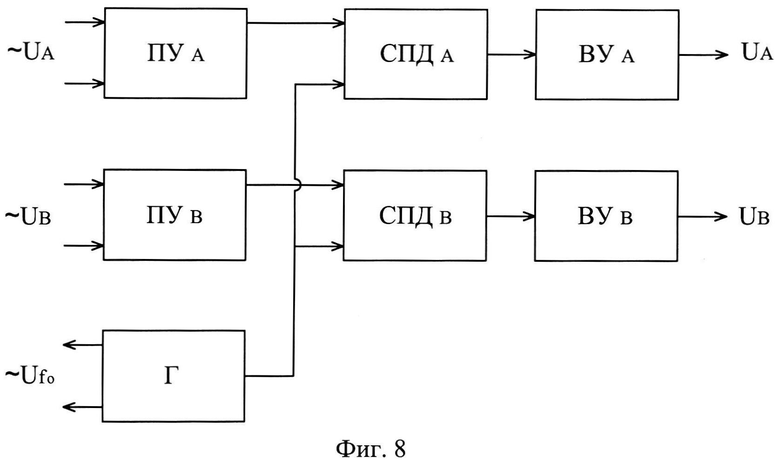
На фиг. 1 представлены чертежи первой пары из подвижной а) и неподвижной б) пластин, а также второй пары из подвижной в) и не подвижных г) пластин, при этом рисунок катушек на неподвижных пластинах б) и г) зеркально симметричен, а на подвижных пластинах а) и в) секторы размещения рисунков катушек расположены ортогонально. На фиг. 2 представлены чертежи, где рисунок катушек на подвижных пластинах а) и б) зеркально симметричен, а на неподвижных катушках б) и г) секторы размещения рисунков катушек расположены ортогонально. На фиг. 3 - фотография двух пар пластин по фиг. 2 (вид на катушки). На фиг. 4 - фотография пар катушек подвижной и неподвижной пластин индукционного датчика углового положения в рабочем состоянии (пары подвижных и неподвижных пластин обращены друг к другу катушками). Фиг. 5 - фотография макета датчика. На фиг. 6 - эквивалентная схема индукционного датчика углового положения из двух пар неподвижных и подвижных катушек с электропитанием от подвижной катушки вращающегося трансформатора. На фиг. 7 - форма огибающих выходных сигналов датчика с частотой fo. На фиг. 8 - схема обработки сигналов датчика, где:
ПУА - предварительный усилитель канала А;
ПУВ - предварительный усилитель канала В;
Г - генератор опорной частоты fo;
СПДА - синхронный пиковый детектор канала А;
СПДВ - синхронный пиковый детектор канала В;
ВУА - выходной усилитель канала А;
ВУВ - выходной усилитель канала В.
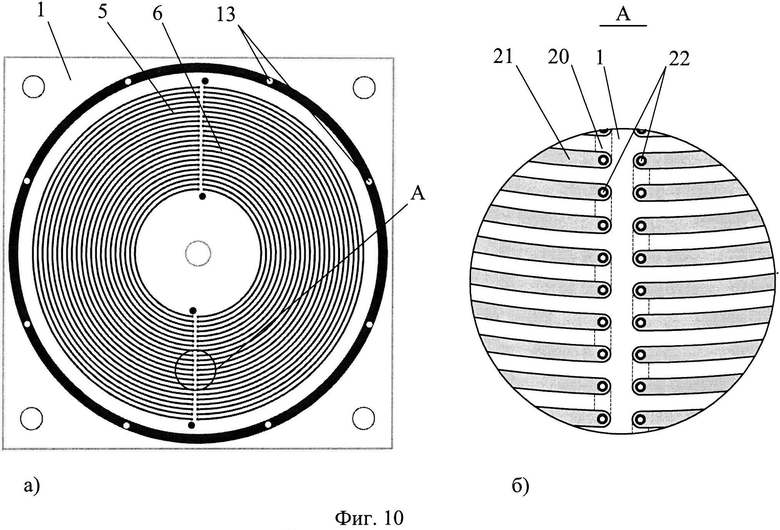
На фиг. 9 представлен характер (зависимости) изменения сигналов UA и UB в зависимости от угла поворота вала α°. На фиг. 10 - рисунок пластины, в которой пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий: а) общий вид сверху, б) увеличенный фрагмент А.
Индукционный датчик углового положения содержит две пары неподвижных (1), (3) и подвижных (2), (4) пластин, содержащих по две идентичные катушки (соответственно (5), (6), (7), (8), (9), (10), (11), (12)), которые расположены равномерно в равных секторах с углом раскрытия, равным 180°. Подвижные пластины (2), (4) жестко установлены на одном валу вращения (14). Неподвижные пластины (1), (3) установлены в основании датчика (15) - его корпусе. В одной паре пластин (например, (1) и (2), см. фиг. 1) соответственно неподвижные (5), (6) и подвижные (7), (8) катушки расположены зеркально симметрично, а в другой паре пластин (например, (3) и (4)) неподвижные (9), (10) и подвижные (11), (12) катушки смещены на угол, равный 90°. На фиг. 2 в первой паре пластин (1) и (3) также неподвижные (5), (6) и подвижные (7), (8) катушки расположены зеркально симметрично, а в другой паре пластин (3) и (4) неподвижные (9), (10) и подвижные (11), (12) катушки смещены на угол, равный 90°. Все пластины (1). (2), (3) и (4) с печатными катушками датчика могут иметь идентичные реперные сквозные отверстия (13), расположенные по периферии за окружностью печатных катушек (5), (6), (7), (8), (9), (10), (11) и (12). Вал вращения (14) установлен в основании датчика (15) с одной степенью свободы, то есть вал (14) может только вращаться. На каждой пластине (1), (2) - (3), (4), соответственно расположенные по две катушки (5), (6) - (7), (8) - (9), (10) - (11), (12) соединены между собой последовательно и встречно. Индукционный датчик углового положения может быть снабжен вращающимся трансформатором, например по книге: Сафонов Л.Н., Волнянский В.Н., Окулов А.И., Прохоров В.Н. Презеционные датчики угла с печатными обмотками. Библиотека приборостроителя. М., «Машиностроение», 1977, 152 с. - рис.77, стр. 114 - [6]. Вращающийся трансформатор также может быть выполнен воздушным индукционным, например, с пластинами, на которые нанесены печатные спиралеобразные катушки индуктивности, например по книге [6]: рис. 9, стр. 15. При этом неподвижная (16) и подвижная (17) плоские пластины вращающегося трансформатора выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными плоскими спиралеобразными обмотками (катушками) индуктивности соответственно (18) и (19). Такой вращающийся трансформатор может иметь одну или несколько неподвижных пластин (16) с печатными спиралеобразными обмотками и одну или несколько подвижных пластин (17) с печатными спиралеобразными обмотками (18) и (19). На фиг. 5 вращающийся трансформатор выполнен из двух пар несколько неподвижных (16) и подвижных (17) пластин. Подвижные пластины (16) жестко закреплены на валу вращения (14), а выходы их обмоток (19) подсоединены к зигзагоподобным катушкам (7), (8), (11) и (12) подвижных пластин (2) и (4) датчика. В индукционном датчике углового положения (см. фиг. 10) пассивные короткие проводники (20) печатных катушек могут быть расположены на обратной стороне пластин (2), (2), (3) и (4) и соединены с длинными активными проводниками (21) через толщину пластин при помощи металлизированных отверстий (22).
Работа индукционного датчика углового положения поясняется следующим. Представленная на фиг. 6 эквивалентная схема индукционного датчика углового положения из двух пар неподвижных и подвижных катушек с электропитанием от подвижной катушки вращающегося трансформатора, по сути, представляет собой вращающийся дифференциальный трансформатор с двумя выходными сигналами, с несущей частотой fo модулированной амплитуды в зависимости от угла поворота вала датчика. Амплитуда выходных сигналов UA и UB меняется прямо пропорционально изменению углового положения вала. При увеличении UA, уменьшается UB и наоборот, а при переходе сигналов UA и UB через «ноль» фаза несущего сигнала fo меняется на 180°. (см. фиг. 7 и фиг. 9). По своей работе предлагаемый датчик аналогичен функционированию синус-косинусного вращающегося трансформатора (СКВТ), и для обработки выходных сигналов датчика могут быть использованы такие же методы, как и для СКВТ, например, метод прямого преобразования по журналу «Современная электроника», №5, 2014 г., с.30…33, Ануфриев В., Лужбинин А., Шумилин С. Методы обработки сигналов индуктивных датчиков линейных и угловых перемещений - [7]. Для работы индукционного датчика, как и для СКВТ требуется генератор опорного напряжения частотой fo для питания через вращающийся трансформатор обмоток возбуждения (подвижных печатных катушек датчика). Отличие работы СКВТ от работы предлагаемого датчика заключается в форме огибающей амплитуды выходных сигналов частотой fo СКВТ и индукционного датчика углового положения. Для СКВТ форма огибающих пары выходных сигналов (в зависимости от угла порота вала) имеет синусоидальный и косинусоидальный характер, а для предлагаемого датчика (см. фиг. 7 и фиг. 9) оба выходных сигнала (UA и UB) в зависимости от угла поворота вала имеют линейный характер, и также имеют угловой сдвиг в 90°. На фиг. 8 представлена схема обработки сигналов датчика, где ПУ - предварительный усилитель сигналов датчика по каналам А и В, СПД - синхронные пиковые детекторы сигналов, обеспечивающие одновременную фиксацию текущего значения амплитуд сигналов по каналам А и В синхронно с частотой генератора fo, ВУ - входные усилители сигналов по каналам А и В. График изменения напряжения выходных сигналов UA и UB в зависимости от угла поворота представлен на фиг. 9. Линейный характер изменения UA и UB в зависимости от угла поворота по фиг. 9 позволяет использовать для дальнейшей обработки простые решения (например, аналоговоцифровые преобразователи АЦП).
Реально при рабочих частотах порядка 2-х МГц, диаметрах катушек подвижных пластин (2), (4), и неподвижных пластин (1), (3), равных 40 мм и шаге проводников катушек, шаг проводников катушек (5), (6), (7), (8), (9). (10), (11) и (12) равный 0,6 мм, при ширине проводников 0,3 мм и воздушном зазоре между подвижной и неподвижной частью порядка 0,15 мм. Диапазон изменения выходного сигнала составляет ±2,5 В с погрешностью преобразования не хуже ±1%.
Современная технология печатных плат позволяет изготавливать печатные катушки с высокой степенью точности, в связи с этим, при необходимости получения более высокой точности преобразования, требования к шагу и ширине проводников, а также к воздушному зазору между катушками могут быть и более жесткими.
Как видно из вышеизложенного, наиболее целесообразно использовать такой индукционный датчик углового положения в разнообразных технических системах контроля различных объектов.
Полагаем, что предложенный индукционный датчик углового положения обладает всеми критериями изобретения, так как совокупность ограничительных и отличительных признаков формулы изобретения является новым для конструкций индукционных датчиков углового положения, и, следовательно, соответствует критерию "новизна".
Совокупность признаков формулы изобретения предложенного устройства неизвестна на данном уровне развития техники и не следует общеизвестным правилам разработки и конструирования индукционных датчиков углового положения, что доказывает соответствие критерию "изобретательский уровень".
Разработка, конструирование и внедрение предложенного индукционного датчика углового положения не представляет никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию "промышленная применимость".
Литература
1. Патент Франции: FR 2830614 А1 от 11.04.2003 г., МПК7 G01D 5/22 - «Бесконтактный датчик положения с взаимной индуктивностью».
2. Патент США: US 6605939 (В1), от 12.08.2003, МПК7 G01D 5/20 - «Индуктивный датчик положения (варианты)».
3. Патент РФ: RU 2454625 от 27.06.2012 года, МПК8 G01B 7/00, G01D 5/20 - «Индукционный датчик положения».
4. Патент РФ: RU 2507474 от 20.02.2014 года, МПК8 G01B 7/00, G01D 5/20 - «Индукционный датчик положения».
5. Патент РФ: RU 2502046 от 20.12.2013 года, МПК8 G01B 7/00 - «Индукционный датчик углового положения» - прототип.
6. Сафонов Л.Н., Волнянский В.Н., Окулов А.И., Прохоров В.Н. Презеционные датчики угла с печатными обмотками. Библиотека приборостроителя. М., «Машиностроение», 1977, 152 с. - рис.77 (стр. 114) и рис.9 (стр. 15).
7. Ануфриев В., Лужбинин А., Шумилин С. Методы обработки сигналов индуктивных датчиков линейных и угловых перемещений / журнал «Современная электроника», №5, 2014 г., с.30…33.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| Индукционный датчик углового положения | 2017 |
|
RU2655632C1 |
| ИНДУКЦИОННЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 2014 |
|
RU2584010C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| Индукционный датчик положения | 2023 |
|
RU2817313C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК СИЛЫ | 2011 |
|
RU2472122C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ КОМПАРАТОР НАПРЯЖЕНИЯ, ТОКА И МОЩНОСТИ | 2006 |
|
RU2302010C1 |
| Бескорпусная синхронная вращающаяся электрическая машина с индукционным датчиком углового положения | 2022 |
|
RU2779627C1 |
| ИНКРЕМЕНТНЫЙ ЕМКОСТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2427794C1 |


Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений (поворотов), с помощью преобразователя перемещения индукционного типа. Технический результат: расширение диапазона измерения датчика углового положения до 360°. Сущность: датчик содержит две пары неподвижных (1), (3) и подвижных (2), (4) пластин, содержащих по две идентичные катушки (соответственно (5), (6), (7), (8), (9), (10), (11), (12)), которые расположены равномерно в равных секторах с углом раскрытия, равным 180°. Подвижные пластины (2), (4) жестко установлены на одном валу вращения (14), установленном с одной степенью свободы в основании датчика (15). Неподвижные пластины (1), (3) установлены в основании датчика (15) - его корпусе. В одной паре пластин (например, (1) и (2), см. фиг.1) соответственно неподвижные (5), (6) и подвижные (7), (8) катушки расположены симметрично, а в другой паре пластин (например, (3) и (4)) неподвижные (9), (10) и подвижные (11), (12) катушки смещены на угол равный 90°. На каждой пластине (1), (2), (3) и (4), соответственно расположенные на них две катушки (5), (6) - (7), (8) - (9), (10) - (11), (12) соединены между собой последовательно и встречно. Все пластины (1). (2), (3) и (4) с печатными катушками датчика имеют идентичные реперные сквозные отверстия (13), расположенные по периферии за окружностью печатных катушек. Пассивные короткие проводники (21) печатных катушек расположены на обратной стороне пластин (1), (2), (3) и (4) и соединены с длинными активными проводниками (22) через толщину пластин при помощи металлизированных отверстий (23). Датчик снабжен вращающимся трансформатором, подвижная обмотка которого закреплена на валу вращения и подсоединена к зигзагоподобным катушкам индуктивности подвижных пластин датчика. Вращающийся трансформатор может быть выполнен в виде неподвижной (16) и подвижной (17) плоских пластин из диэлектрического материала, обращенных друг к другу сторонами с нанесенными на них печатными плоскими спиралеобразными обмотками соответственно (18) и (19). 3 з.п. ф-лы, 10 ил.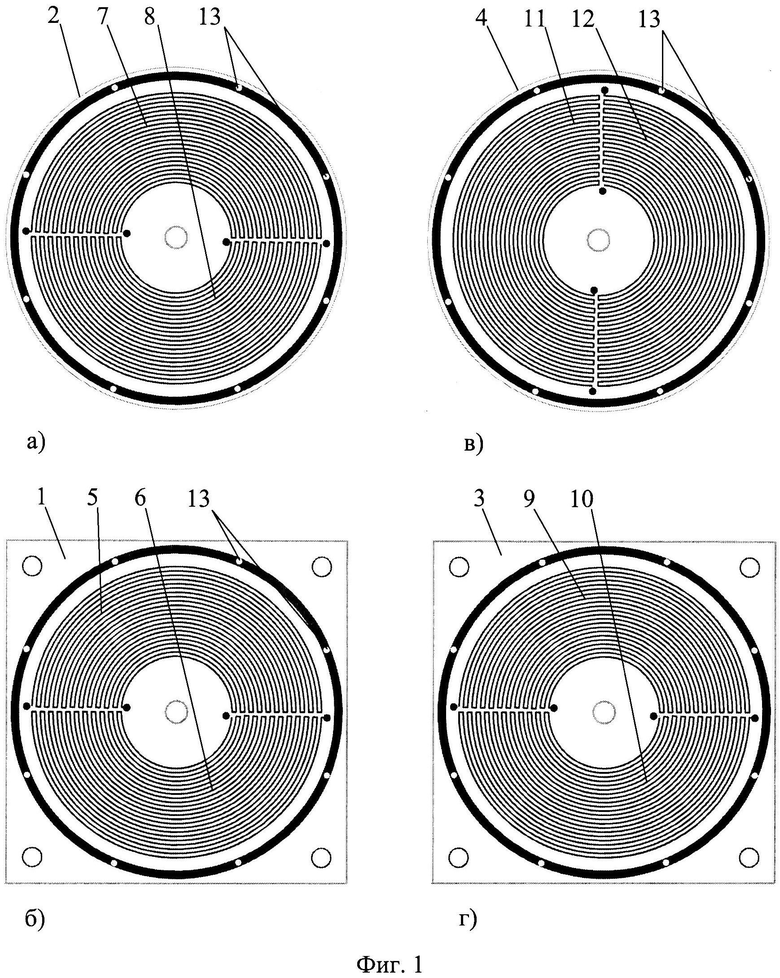
1. Индукционный датчик углового положения, содержащий установленные с общей осью вращения относительно друг друга с одной степенью свободы неподвижную и подвижную плоские пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими зигзагоподобными катушками индуктивности, соответственно расположенными по дугам окружности активными длинными проводниками и расположенными по радиусам пассивными короткими проводниками, отличающийся тем, что датчик содержит две пары неподвижных и подвижных пластин, содержащих по две идентичные катушки, которые расположены равномерно в равных секторах с углом раскрытия, равным 180°, подвижные пластины жестко установлены на одном валу вращения, в одной паре пластин неподвижная и подвижные катушки расположены симметрично, а в другой паре пластин неподвижная и подвижные катушки смещены на угол, равный 90°, при этом на каждой пластине, соответственно расположенные на них две катушки соединены между собой последовательно и встречно.
2. Индукционный датчик углового положения по п. 1, отличающийся тем, что все его пластины с печатными катушками имеют идентичные реперные сквозные отверстия, расположенные по периферии за окружностью печатных катушек, при этом пассивные короткие проводники печатных катушек расположены на обратной стороне пластин и соединены с длинными активными проводниками через толщину пластин при помощи металлизированных отверстий.
3. Индукционный датчик углового положения по п. 1, отличающийся тем, что он снабжен вращающимся трансформатором, подвижная обмотка которого закреплена на валу вращения и подсоединена к зигзагоподобным катушкам индуктивности подвижных пластин датчика.
4. Индукционный датчик углового положения по п. 2, отличающийся тем, что вращающийся трансформатор выполнен в виде неподвижной и подвижной плоских пластины из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными плоскими спиралеобразными катушками индуктивности.
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| US 20140117980 А1, 01.05.2014 | |||
| US 6304076 B1, 16.10.2001 | |||
| Индукционный датчик угла | 1974 |
|
SU521636A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2148788C1 |
| US 20130127449 A1, 23.05.2013 | |||
| US 8570028 B2, 29.10.2013. | |||

