Фиг.{
Изобретение относится к измерительной технике и может быть использовано для контроля линейных или угловых (вращательных) перемещений различных объектов.
Целью изобретения является повышение точности посредством линеаризации выходной характеристики преобразования дифференциального емкостного преобразователя перемещений, имеющего плоские ;)лект- роды, путем уменьшения влияния непараллельности установки его электродов вследствие их перекоса.
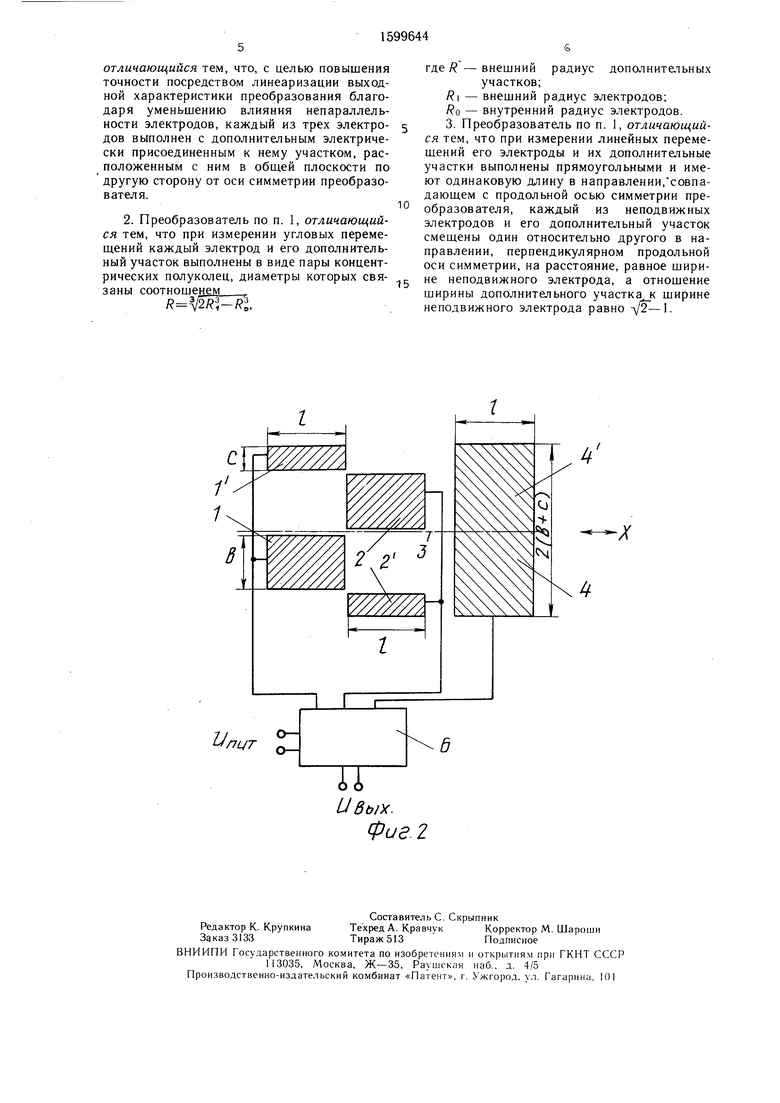
На фиг. 1 показана схема дифференциального емкостного преобразователя с плоскими электродами, предназначенного для измерения угловых (врапдательных) пере- мещений; на фиг. 2 - то же, для измерения линейных перемещений (подвижный электрод преобразователя изображен в общей плоскости с его неподвижными электродами)
Дифференциальный емкостной преобразователь перемещений содержит два размещенных в общей плоскости неподвижных электрода 1 и 2, расположенных симметрично относительно оси 3 симметрии преобразователя и соединенных электрически с их дополнительными участками 1 и 2 соот- етственно, которые расположены с ними в общей плоскости по другую сторону относительно оси 3 симметрии. Параллельно плоскости обоих неподвижных электродов и их дополнительных участков расположен третий плоский электрод 4, установленный с возможностью углового а (или вращательного) перемещения относительно оси 5 (фиг. 1) или линейного х перемещения в направлении оси 3 симметрии преобразователя (фиг. 2).
В варианте исполнения дифференциаль- ного емкостного преобразователя для измерения угловых перемещений его электроды 1,
2и 4 и их дополнительные участки 1, 2 и 4 выполнены в виде пар концентрических полуколец, диаметры которых связаны следующим соотнощением:
, внутренний радиус электродов;
R - внешний радиус электродов;
R - внешний радиус дополнитйпьных участков.
Внутренний радиус этих участков равен внешнему радиусу основных электродов преобразователя.
В варианте исполнения емкостного преобразователя для измерения линейных перемещений его электроды и их дополнитепьные участки выполнены прямоугольными. Их длина / в направлении, совпадающем с осью
3симметрии преобразователя, одинакова, а ширина, измеряемая в направлении, перпендикулярном этой оси, выбирается так, чтобы ширина г дополнительных участков 1 и 2 неподвижных электродов 1 и 2 т-носк- лась к ширине h этих электродов, как V 5 -1. этом каждый из неподвижных электро
0
0
5
5
5
5
0
0
5
дов и его дополнительный участок смещены один относительно другого в направлении, перпендикулярном оси 3 симметрии преобразователя, вдоль которой осуществляются контролируемые перемещения подвижного электрода 4 на расстояние, равное щирине b неподвижного электрода., Ширина подвижного электрода 4 вместе с его дополнительным участком 4 должна быть, соответственно, не менее 2(6+с). Электроды емкостного преобразовате тя подключены к блоку 6 измерения, вырабатывающему на выходе напряжение, пропорциональное угловому (а) или линейному (х) перемещению контролируемого объекта, связываемого в процессе измерения с подвижным электродом 4 преобразователя.
Дифференциальный емкостной преобразователь перемещений работает следующим образом.
При угловом или линейном перемещении подвижного электрода 4 преобразователя относительно пары его неподвижных электродов I и 2 происходит дифференциальное Линейное изменение площади их взаимного перекрытия. При этом непараллельность плоскостей этих электродов, обусловленная перекосом подвижного электрода относительно неподвижных электродов, практически не влияет на линейность характеристики преобразования перемещений, так как дифференциально изменяющиеся рабочие емкости преобразователя определяются суммой параллельно включенных емкостей между неподвижными электродами I и 2 вместе с их дoпoлнитeJ ьными участками 1 и 2, расположенными, соответственно, с противоположной стороны относительно оси симметрии преобразователя, и общим подвижным электродом 4 и его дополнительным участком 4. Благодаря этому ув кч&нне одной из рабочих емкостей, например , между неподвижным 1 и подвижным 4 электродами преобразователя, вызванное перекосом подвижного электрода, компенсируется уменьшением дополнительной емкости Ci - 4 между дополнительными участками 1 и 4, которые расположены по другую сторону от оси, относительно которой имеет место перекос. Точность компенсации перекоса электродов преобразователя определяется вышеуказанным выбором соотношения площадей рабочих электродов и их дополнительных участков.
Формула изобретения
1. Дифференциальный емкостный преобразователь перемещений, содержащий два размещенных в общей плоскости неподвижных электрода, расположенных симметрично относительно оси симметрии преобразователя, и установленный параллельно им с возможностью перемещения третий электрод.
отличающийся тем, что, с целью повышения точности посредством линеаризации выходной характеристики преобразования благодаря уменьшению влияния непараллельности электродов, каждый из трех электро- дов выполнен с дополнительным электрически присоединенным к нему участком, расположенным с ним в общей плоскости по другую сторону от оси симметрии преобразователя.
2. Преобразователь по п. 1, отличающийся тем, что при измерении угловых перемещений каждый электрод и его дополнительный участок выполнены в виде пары концентрических полуколец, диаметры которых связаны соотнощенем
,
где - внешний радиус дополнительных участков;
R - внешний радиус электродов;
RO внутренний радиус электродов.
3. Преобразоватать по п. 1, отличающийся тем, что при измерении линейных перемещений его электроды и их дополнительные участки выполнены прямоугольными и имеют одинаковую длину в направлении, совпадающем с продольной осью симметрии преобразователя, каждый из неподвижных электродов и его дополнительный участок смещены один относительно другого в направлении, перпендикулярном продольной оси симметрии, на расстояние, равное щири- не неподвижного электрода, а отнощение ширины дополнительного участка к щирине неподвижного электрода равно .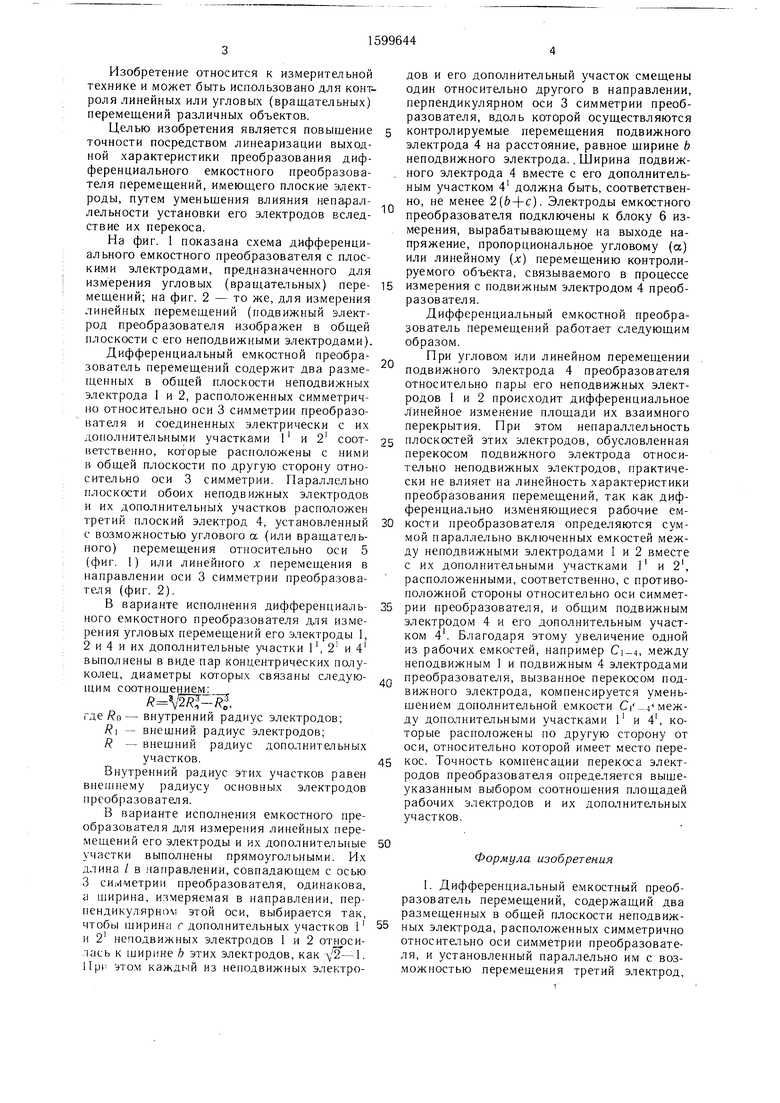
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный емкостной преобразователь углового перемещения | 1990 |
|
SU1775037A3 |
| Дифференциальный емкостной преобразователь углового перемещения | 1990 |
|
SU1768954A1 |
| Дифференциальный емкостный преобразователь углового перемещения | 1990 |
|
SU1838755A3 |
| Емкостный дифференциальный датчик перемещений | 1988 |
|
SU1504493A1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| Емкостный датчик угловых перемещений | 1987 |
|
SU1502959A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037770C1 |
| Дифференциальный емкостный датчик угловых перемещений | 1986 |
|
SU1323850A1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
Изобретение относится к измерительной технике. Цель - повышение линейности выходной характеристики дифференциального емкостного преобразователя перемещений путем компенсации влияния непараллельности его рабочих электродов. Преобразователь содержит два размещенных в общей плоскости неподвижных рабочих электрода 1,2 и установленный с возможностью линейного или углового перемещения относительно них третий рабочий электрод 4. Каждый из этих электродов выполнен с дополнительным электрически присоединенным к нему участком 1Ъ, 2Ъ и 4Ъ соответственно, который расположен в той же плоскости, что и его рабочий электрод, но по другую сторону относительно оси 3 симметрии преобразователя. В случае измерения угловых перемещений рабочие электроды и их дополнительные участки выполнены в виде пар концентрических полуколец, диаметры которых связаны определенным соотношением. В случае измерения линейных перемещений электроды и их дополнительные участки выполнены прямоугольными, их длина одинакова в направлении, совпадающем с направлением контролируемого линейного перемещения, а ширина находится в определенном соотношении. Благодаря тому, что дифференциально изменяющиеся в функции площади взаимного перекрытия электродов емкости преобразователя определяются суммой параллельно соединенных емкостей, образованных каждым из неподвижных электродов и его дополнительным участком, расположенным с противоположной от него стороны относительно оси симметрии преобразователя, и подвижным электродом с его дополнительным участком, происходит взаимная компенсация изменения этих емкостей, вызванного переносом подвижного электрода. 2 з.п.ф-лы, 2 ил.
с г
It
| Емкостный датчик | 1984 |
|
SU1231396A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ацюковский В | |||
| А | |||
| Емкостные дифференциальные датчики перемещения | |||
| Госэнерго- издат, 1960, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
