Изобретение относится к телевизионно- вычислительной автоматике и может быть использовано для автоматического анализа изображений объектов, находящихся в ноле зрения телевизионного датчика, в частности для автоматизации счета и измерения размеров объектов, нанример кровяных телец, деталей на конвейере, клеток ткани, анализа чистоты жидкостей, распределения объектов по размерным градациям и т. д.
Цель изобретения - повышение точности устройства.
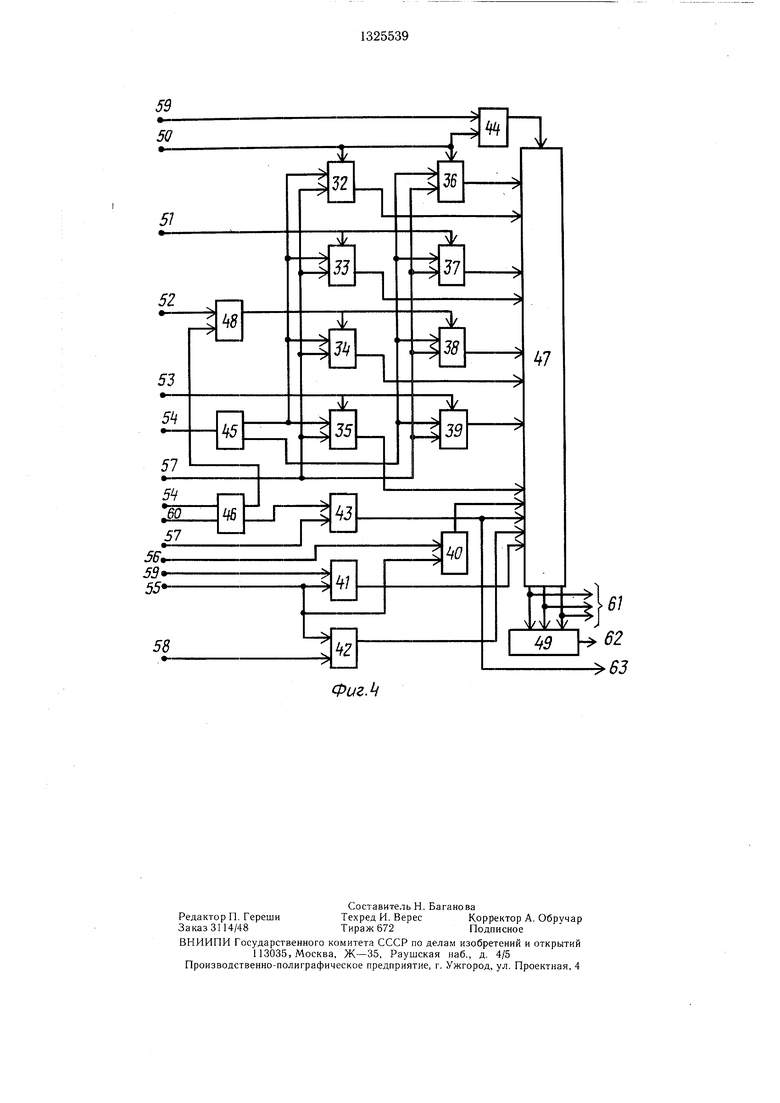
На фиг. 1 приведена структурная схема устройства; на фиг. 2- - участок телевизионного растра с тремя объектами; на фиг. 3 - структурная схема задатчика режимов работы; на фиг. 4 - структурная схема формирования команд.
Устройство содержит телевизионный датчик 1, блок 2 квантования, элемент 3 задержки, блок 4 выделения характерных точек видеосигнала, блок 5 селекции видеосигнала, формирователь 6 команд, программно-временной блок 7, блок 8 микропрограммного управления, задатчик 9 режимов работы, счетчик 10, блок 11 вывода, блок 12 оперативной памяти, арифметический блок 13, блок 14 управляющей памяти.
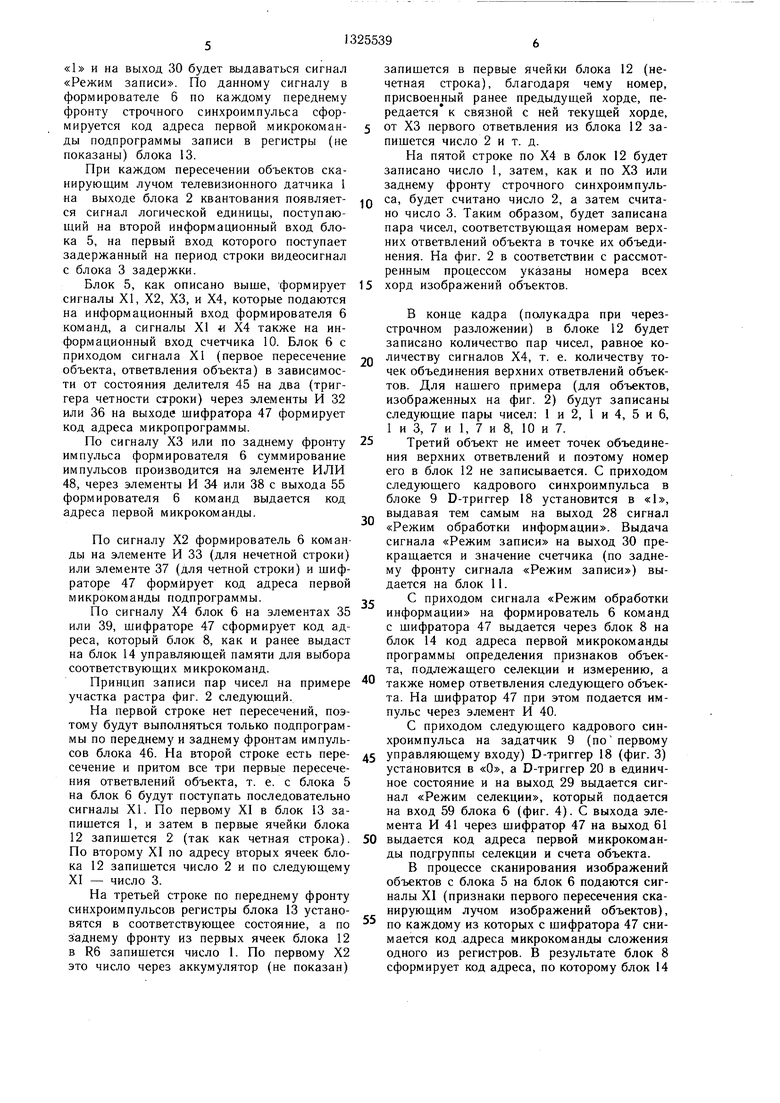
Блок-схема задатчика 9 режимов работы содержит первый Р-триггер 15, элементы И 16 и 17, первый D-триггер 18, второй Р-триггер 19, второй D-триггер 20, элементы И 21 и 22. Третий управляющий вход задатчика 9 соответствует входу 23 первый управляющий входу 24. На вход 25 поступает сигнал «Нуск, на вход 26 - «Сброс. Второй управляющий вход задатчика 9 соответствует входу 27. Выходы 28- 31 соответствуют выходу задатчика 9.
Блок-схема формирователя 6 команды содержит элементы И 32-44, триггер (делитель на 2) 45, формирователь 46 переднего и заднего фронтов строчного синхроимпульса, шифратор 47, элементы ИЛИ 48 и 49. Входы 50-53 соответствуют информационному, 54 и 55 - первому управляющему, 56-59 - второму управляющему, вход 60 - третьему управляющему входам блока 6. Выход 61 соответствует информационному, выход 62 - второму управляю- ще.му, 63 - первому yпpaвv яющeмy выходам блока 6.
Блок 4 выделения характерных точек видеосигнала служит для формирования следующих сигналов: XI - сигналы задних фронтов первых хорд (пересечений объектов), Х2 - сигналы передних фронтов импульсов совпадения сигналов текущей строки и задержанных хорд, ХЗ - сигналы задних фронтов дизъюнкции текущей и задержанной хорд, Х4 - сигналы задержанных хорд при объединении верхних ответвлений объектов.
5
0
5
0
5
0
5
0
5
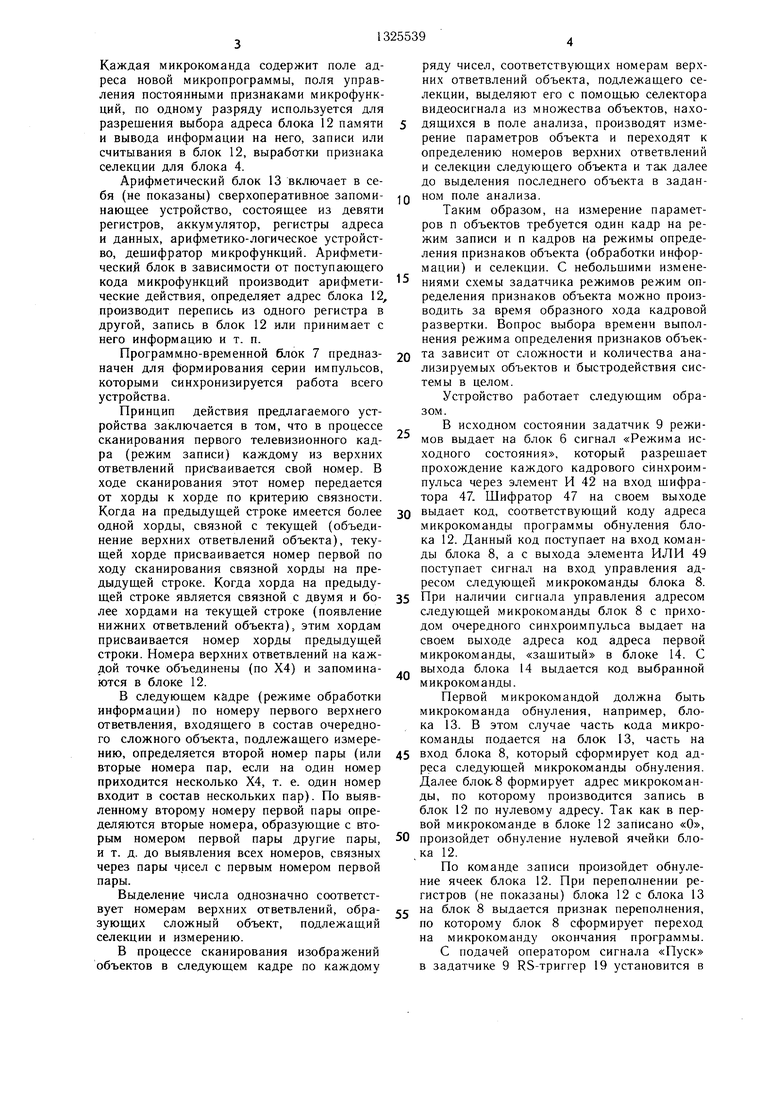
На фиг. 2 показан участок растра, включающий в себя три объекта разной формы, пересекаемый строками. Показаны также хорды (утолщенными линиями), номера хорд и местоположение сигналов XI-Х4. Сигналы XI-Х4 по длительности равны и всегда постоянны. Это достигается привязкой к тактовым импульсам, подаваемым на управляющий вход блока 5 с программно-временного блока 7.
Блок 8 микропрограммного управления предназначен для определения последовательности микрокоманд, выбираемых из блока 14 управляющей памяти, и анализа сигналов переноса из арифметического блока 13 для принятия решения о переходах в микропрограмме.
Задатчик 9 режимов работы предназначен для выработки управляющих сигналов: режим исходного состояния - (когда система находится в режиме ожидания), режим записи, режим обработки информации и режим селекции. Необходимость указанных режимов вызвана тем, что принцип работы устройства основан на записи в блок 12 оперативной памяти 12 сжатой информации о видеосигнале, но достаточной для выделения любого объекта любой сложности из совокупности объектов: определение признаков объекта, подлежащего селекции, селекция данного объекта, определение признаков следующего объекта и т. д. Признаками объекта служат номера начал ответвлений.
Формирователь 6 команд служит для выработки адреса первых микрокоманд следующих подпрограмм, «зашитых в блоке 14 управляющей памяти: в режиме исходного состояния - подпрограмма обнуления блока 12 оперативной памяти, в режиме записи - присвоение каждому ответвлению объектов своего номера и передача этого номера от хорды к хорде, а по Х4 запись в блок 12 пар связных номеров. В соответствии с приведенным на фиг. 2 участком растра с тремя объектами в конце режима записи в блоке 12 будут записаны следующие пары чисел 1-2, 5-6, 1-4, 1-3, 7-1, 7-8, 10-7.
В режиме обработки информации по найденным связным парам путем поиска одинаковых номеров, входящих в состав разных пар, определяются номера всех верхних ответвлений (связных частей) очередного объекта, подлежащего измерению. В режиме «селекция по найденным номерам выполняется подпрограмма формирования импульсов запуска селекции видеосигнала каждого очередного объекта, подлежащего анализу.
Блок 14 управляющей памяти предназначен для хранения и выдачи в каждый момент времени новой микрокоманды. Адрес новой микрокоманды определяет блок 8.
Каждая микрокоманда содержит поле адреса новой микропрограммы, поля управления постоянными признаками микрофункций, по одному разряду используется для разрешения выбора адреса блока 12 памяти и вывода информации на него, записи или считывания в блок 12, выработки признака селекции для блока 4.
Арифметический блок 13 включает в себя (не показаны) сверхоперативное запоминающее устройство, состоящее из девяти регистров, аккумулятор, регистры адреса и данных, арифметико-логическое устройство, дешифратор микрофункций. Арифметический блок в зависимости от поступающего кода микрофункций производит арифметические действия, определяет адрес блока 12 производит перепись из одного регистра в другой, запись в блок 12 или принимает с него информацию и т. п.
Программно-временной блок 7 предназначен для формирования серии импульсов, которыми синхронизируется работа всего устройства.
Принцип действия предлагаемого устройства заключается в том, что в процессе сканирования первого телевизионного кадра (режим записи) каждому из верхних ответвлений присваивается свой номер. В ходе сканирования этот номер передается от хорды к хорде по критерию связности. Когда на предыдущей строке имеется более одной хорды, связной с текущей (объединение верхних ответвлений объекта), текущей хорде присваивается номер первой по ходу сканирования связной хорды на предыдущей строке. Когда хорда на предыдущей строке является связной с двумя и более хордами на текущей строке (появление нижних ответвлений объекта)., этим хордам присваивается номер хорды предыдущей строки. Номера верхних ответвлений на каждой точке объединены (по Х4) и запоминаются в блоке 12.
В следующем кадре (режиме обработки информации) по номеру первого верхнего ответвления, входящего в состав очередного сложного объекта, подлежащего измерению, определяется второй номер пары (или вторые номера пар, если на один номер приходится несколько Х4, т. е. один номер входит в состав нескольких пар). По выявленному второму номеру первой пары определяются вторые номера, образующие с вторым номером первой пары другие пары, и т. д. до выявления всех номеров, связных через пары чисел с первым номером первой пары.
Выделение числа однозначно соответствует номерам верхних ответвлений, образующих сложный объект, подлежащий селекции и измерению.
В процессе сканирования изображений объектов в следующем кадре по каждому
ряду чисел, соответствующих номерам верхних ответвлений объекта, подлежащего селекции, выделяют его с помощью селектора видеосигнала из множества объектов, находящихся в поле анализа, производят измерение параметров объекта и переходят к определению номеров верхних ответвлений и селекции следующего объекта и так далее до выделения последнего объекта в заданQ ном поле анализа.
Таким образом, на измерение параметров п объектов требуется один кадр на режим записи и п кадров на режимы определения признаков объекта (обработки информации) и селекции. С небольшими измене ниями схемы задатчика режимов режим определения признаков объекта можно производить за время образного хода кадровой развертки. Вопрос выбора времени выполнения режима определения признаков объек0 та зависит от сложности и количества анализируемых объектов и быстродействия системы в целом.
Устройство работает следующим образом.
В исходном состоянии задатчик 9 режимов выдает на блок 6 сигнал «Режима исходного состояния, который разрещает прохождение каждого кадрового синхроимпульса через элемент И 42 на вход шифратора 47. Шифратор 47 на своем выходе
0 выдает код, соответствующий коду адреса микрокоманды программы обнуления блока 12. Данный код поступает на вход команды блока 8, а с выхода элемента ИЛИ 49 поступает сигнал на вход управления адресом следующей микрокоманды блока 8.
5 При наличии сигнала управления адресом следующей микрокоманды блок 8 с приходом очередного синхроимпульса выдает на своем выходе адреса код адреса первой микрокоманды, «зашитый в блоке 14. С
выхода блока 14 выдается код выбранной микрокоманды.
Первой микрокомандой должна быть микрокоманда обнуления, например, блока 13. В этом случае часть кода микрокоманды подается на блок 13, часть на
5 вход блока 8, который сформирует код адреса следующей микрокоманды обнуления. Далее блок.8 формирует адрес микрокоманды, по которому производится запись в блок 12 по нулевому адресу. Так как в первой микрокоманде в блоке 12 записано «О,
0 произойдет обнуление нулевой ячейки бло- ,ка 12.
По команде записи произойдет обнуление ячеек блока 12. При переполнении регистров (не показаны) блока 12 с блока 13
г на блок 8 выдается признак переполнения,
по которому блок 8 сформирует переход
на микрокоманду окончания программы.
С подачей оператором сигнала «Пуск
в задатчике 9 RS-триггер 19 установится в
«1 и на выход 30 будет выдаваться сигнал «Режим записи. По данному сигналу в формирователе 6 по каждому переднему фронту строчного синхроимпульса сформируется код адреса перЕюй микрокоманды подпрограммы записи в регистры (не показаны) блока 13.
При каждом пересечении объектов сканирующим лучом телевизионного датчика 1 на выходе блока 2 квантования появляется сигнал логической единицы, поступающий на второй информационный вход блока 5, на первый вход которого поступает задержанный на период строки видеосигнал с блока 3 задержки.
Блок 5, как описано выше, формирует сигналы XI, Х2, ХЗ, и Х4, которые подаются на информационный вход формирователя 6 команд, а сигналы XI « Х4 также на информационный вход счетчика 10. Блок 6 с приходом сигнала XI (первое пересечение объекта, ответвления объекта) в зависимости от состояния делителя 45 на два (триггера четности строки) через элементы И 32 или 36 на выходе шифратора 47 формирует код адреса микропрограммы.
По сигналу ХЗ или по заднему фронту импульса формирователя 6 суммирование импульсов производится на элементе ИЛИ 48, через элементы И 34 или 38 с выхода 55 формирователя 6 команд выдается код адреса первой микрокоманды.
По сигналу Х2 формирователь 6 команды на элементе И 33 (для нечетной строки) или элементе 37 (для четной строки) и шифраторе 47 формирует код адреса первой микрокоманды подпрограммы.
По сигналу Х4 блок 6 на элементах 35 или 39, шифраторе 47 сформирует код адреса, который блок 8, как и ранее выдаст на блок 14 управляющей памяти для выбора соответствующих микрокоманд.
Принцип записи пар чисел на примере участка растра фиг. 2 следующий.
На первой строке нет пересечений, поэтому будут выполняться только подпрограммы по переднему и заднему фронтам импульсов блока 46. На второй строке есть пересечение и притом все три первые пересечения ответвлений объекта, т. е. с блока 5 на блок 6 будут поступать последовательно сигналы XI. По первому XI в блок 13 за- пищется 1, и затем в первые ячейки блока 12 запишется 2 (так как четная строка). По второму XI по адресу tiTopbix ячеек блока 12 запишется число 2 и по следующему XI - число 3.
На третьей строке по переднему фронту синхроимпульсов регистры блока 13 установятся в соответствующее состояние, а по заднему фронту из первых ячеек блока 12 в R6 запишется число 1. По первому Х2 это число через аккумулятор (не показан)
запишется в первые ячейки блока 12 (нечетная строка), благодаря чему номер, присвоенный ранее предыдущей хорде, передается к связной с ней текущей хорде,
от ХЗ первого ответвления из блока 12 запишется число 2 и т. д.
На пятой строке по Х4 в блок 12 будет записано число 1, затем, как и по ХЗ или заднему фронту строчного синхроимпульса, будет считано число 2, а затем считано число 3. Таким образом, будет записана пара чисел, соответствующая номерам верхних ответвлений объекта в точке их объединения. На фиг. 2 в соответствии с рассмотренным процессом указаны номера всех
хорд изображений объектов.
В конце кадра (полукадра при через- строчном разложении) в блоке 12 будет записано количество пар чисел, равное количеству сигналов Х4, т. е. количеству точек объединения верхних ответвлений объектов. Для нашего примера (для объектов, изображенных на фиг. 2) будут записаны следующие пары чисел: 1 и 2, I и 4, 5 и 6, 1 и 3, 7 и 1, 7 и 8, 10 и 7.
Третий объект не имеет точек объединения верхних ответвлений и поэтому номер его в блок 12 не записывается. С приходом следующего кадрового синхроимпульса в блоке 9 D-триггер 18 установится в «1, выдавая тем самым на выход 28 сигнал «Режим обработки информации. Выдача сигнала «Режим записи на выход 30 прекращается и значение счетчика (по заднему фронту сигнала «Режим записи) выдается на блок 11.
С приходом сигнала «Режим обработки информации на формирователь 6 команд с шифратора 47 выдается через блок 8 на блок 14 код адреса первой микрокоманды программы определения признаков объекта, подлежащего селекции и измерению, а
также номер ответвления следующего объекта. На щифратор 47 при этом подается импульс через элемент И 40.
С приходом следующего кадрового синхроимпульса на задатчик 9 (полпервому
управляющему входу) D-триггер 18 (фиг. 3) установится в «О, а D-триггер 20 в единичное состояние и на выход 29 выдается сигнал «Режим селекции, который подается на вход 59 блока 6 (фиг. 4). С выхода элемента И 41 через шифратор 47 на выход 61
выдается код адреса первой микрокоманды подгруппы селекции и счета объекта.
В процессе сканирования изображений объектов с блока 5 на блок 6 подаются сигналы XI (призна1ш первого пересечения сканирующим лучом изображений объектов),
по каждому из которых с шифратора 47 снимается код .адреса микрокоманды сложения одного из регистров. В результате блок 8 сформирует код адреса, по которому блок 14
памяти выдаст код микрокоманды считывания очередного числа.
Для примера в случае селекции первого объекта на фиг. 2 импульсы селекции формируются для верхних ответвлений, имеющих номера 1, 2, 3, 4, 7, 8 и 10. Поступая на управляющий вход блока 4, эти импульсы запускают процесс селекции в блоке 4 всех хорд, связанных (по известному критерию перекрытия текущих и задержанных на период строки хорд) с начальными хордами, имеющими перечисленные выше номера.
Таким образом, (фиг. 2), в данном кадре осуществляется селекция всех хорд, принадлежащих только первому объекту, включая нижние его ответвления.
Видеосигнал от селектированных хорд поступает на первый информационный вход блока 11, где производится регистрация (индикация) геометрических параметров каждого объекта.
С приходом следующего кадрового синхроимпульса D-триггер 18 (фиг. 3) устанавливается в «1, а D-триггер 20 - в «О. В результате сигнал «Режим селекции снимается и задним фронтом его показание счетчика 10 уменьщается на «1. Если его состояние не становится равным «О, формирователь 9 выдает на блок 6 сигнал «Режим определения признаков. Блок 6 формирует код адреса первой микрокоманды программы определения признаков объекта, подлежащего селекции и измерению, а также номер ответвления следующего объект- та.
Устройство ь соответствии с описанным выще принципом работы обеспечивает по номеру, который хранится в блоке 13, определение всех номеров ответвлений следующего объекта, производит ранжировку ряда чисел, соответствующих номерам ответвлений объекта, подлежащего селекции, переписывает полученный ряд в общий ряд номеров ответвлений выделенных объектов, производит ранжировку общего ряда, определяет номер ответвления следующего объекта.
Для примера по фиг. 2 после селекции третьего объекта счетчик 10 устанавливается в «О на управляющем выходе сформируется импульс, которым через элемент И 17 блока 9 (фиг. 3) триггеры 19 и 15 установятся в исходное состояние, а они, в свою очередь, запретят выработку любого из режимов, кроме режима «Исходное состояние, работа устройства в котором описана выще.
Использование блока селекции видеосигнала, задатчика режимов работы, формирователя команд, блока микропрограммного управления, арифметического блока и блока управляющей памяти позволяет увеличить точность счета и селекции сложных фигур, а также расширить функциональные возможности устройства за счет возможности детального анализа изображения объектов, использования устройства для технологического контроля изготовляемой продукции.
Формула изобретения
. Устройство для селекции и счета объектов, расположенных беспорядочно, содержащее телевизионный датчик, выход
которого соединен со входом блока квантования, выход которого непосредственно и через элемент задержки подключен соответственно к первому и второму входам блока выделения характерных точек видео0 сигнала, выход которого соединен с первым входом счетчика, блок оперативной памяти, программно-временной блок, первый выход которого подключен к третьему входу блока выделения характерных точек видеосигнала, и блок вывода, отличающееся тем, что, с целью повышения точности устройства, в него введены блок селекции видеосигнала, задатчик режимов работы, формирователь команд, блок микропрограммного управления, арифметический блок и блок
0 управляющей памяти, второй выход телевизионного датчика подключен к первому входу задатчика режимов работы программно-временного блока и к первому управляющему входу формирователя команд, второй управляющий вход которого объединен с
5 вторым входом счетчика и с первым входом блока вывода и подключен к выходу задатчика режимов работы, второй вход которого соединен с первым выходом счетчика, второй выход которого подключен к второму
5
0
входу блока вывода, третий вход которого
соединен с выходом блока селекции видеосигнала, первый и второй входы которого подключены соответственно к выходам элемента задержки и блока квантования, выход блока выделения характерных точек
5 соединен с информационным входом формирователя команд, первый управляющий выход которого подключен к третьему входу задатчика режимов работы, а вход синхронизации - к первому выходу программно- временного блока, который соединен с вхо0 дом синхронизации блока микропрограммного управления, установочный и адресные входы которого подключены соответственно к информационному и второму управляющему выходам формирователя команд, ад ресный выход блока микропрограммного управления соединен с первым входом блока управляющей памяти, первые и вторые выходы которого подключены соответственно к первому и второму управляющим входам блока микропрограммного управления, четвертый управляющий вход и информационный выход которого соединены соответственно с первыми входом и выходом арифметического блока, вторЪй вход которого подключен к третьему выходу блока управляющей памяти, четвертый, пятый и шестой выходы которого соединены соответственно с третьим, четвертым и пятым входами арифметического блока, шестой вход которого подключен к первому выходу программно-временного блока, седьмой и восьмой выходы блока управляющей памяти соединены соответственно с первым управляющим входом блока селекции видеосигнала и с первым входом оперативного блока памяти, второй и третий входы которого подключены к одноименным выходам арифметического блока, а выход - к седьмому входу арифметического блока.
2. Устройство по п. 1, отличающееся тем, что задатчик режимов работы содержит элементы И, D-триггеры и RS-тригге- ры, первые входы D-триггеров и первого элемента И являются первым входом задат- чика режимов работы, первый вход второго элемента И является вторым входом задат- чика режимов работы, выход второго элемента И соединен с первыми входами RS-триггеров, второй вход первого из которых является третьим входом задатчика режимов работы, выход первого элемента И подключен к второму входу второго RS-триг- гера, выходы которого соединены с первыми входами третьего и четвертого элементов И, второй вход последнего из которых подключен к первому выходу первого RS-триггера, второй выход которого соединен с вторыми входами D-триггеров, первый выход первого из которых подключен к третьему входу второго D-триггера, а второй выход - к второму входу третьего элемента И, третий вход которого соединен с первым выходом второго D-триггера, выходы третьего и четвертого элементов И и первый выход первого р-триггера и второй выход второго D-триггера являются выходом задатчика режимов работы.
3. Устройство по п. 1, отличающееся тем, что формирователь команд содержит с
первого по тринадцатый элементы И, элементы ИЛИ, шифратор, триггер и формирователь переднего и заднего фронтов строчного синхроимпульса, первый и второй выходы которого подключены соответственно к пер0 вому входу двенадцатого элемента И и к первому входу первого элемента ИЛИ, первый и второй выходы триггера подключены соответственно к первому входу с первого по четвертый элемент Ник первому входу с пятого по восьмой элементы И, выходы
всех элементов И соединены с соответствующими входами дешифратора, выходы которого являются информационными выходами формирователя команд и подключены к входам второго элемента ИЛИ, выход две0 надцатого элемента И является первым управляющим выходом формирователя команд выход второго элемента ИЛИ - вторым управляющим выходом формирователя команд, первый вход формирователя перед- него и заднего фронтов строчных синхроимпульсов являются входом синхронизации блока формирования команд, второй вход переднего и заднего фронтов формирователя строчных синхроимпульсов, вход триггера и первые входы девятого, десятого и
0 одиннадцатого элементов И объединены и являются первым управляющим входом блока формирования команд, первый вход тринадцатого элемента И и вторые входы остальных элементов И объединены и являются вторым управляющим входом бло5 ка формирования команд, выход первого элемента ИЛИ подключен к третьим входам третьего и седьмого элементов И, вторые входы первого элемента ИЛИ и тринадцатого элемента И и третьи входы пер« вого, второго, четвертого, пятого, щестого и восьмого элементов И объединены и являются информационным входом блока формирования команд.
8,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для селекции и счета объектов | 1987 |
|
SU1444846A1 |
| Устройство для счета и измерения размеров объектов | 1987 |
|
SU1509961A1 |
| Устройство для подсчета объектов,расположенных беспорядочно | 1983 |
|
SU1129633A1 |
| Устройство для селекции и регистрации объектов | 1987 |
|
SU1444845A1 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ И ИЗМЕРЕНИЯ РАЗМЕРОВ ОБЪЕКТОВ | 1998 |
|
RU2163395C2 |
| Телевизионное устройство для счета объектов | 1980 |
|
SU935989A1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВИДЕОСИГНАЛА | 1992 |
|
RU2042202C1 |
| Устройство для сопряжения центрального процессора с группой арифметических процессоров | 1988 |
|
SU1529236A1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВИДЕОСИГНАЛА | 1992 |
|
RU2042201C1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
Изобретение относится к телевизион- но-вычислительной автоматике и -может быть использовано для автоматического анализа изображений объектов, находящихся в поле зрения телевизионного датчика, в частности для автоматизации счета и измерения размеров объектов, например кровяных телец, деталей на конвейере, клеток ткани, для анализа чистоты жидкостей, распределения объектов по размерным градациям и т. д. Целью изобретения является повышение точности устройства. Устройство содержит датчик 1, блок 2 квантования, элемент 3 задержки, блок 4 выделения характерных точек видеосигнала, блок 5 селекции видеосигнала, формирователь 6 команд, программно-временной блок 7, блок 8 микропрограммного управления, задатчик 9 режимов работы, счетчик 10, блок II вывода, блок 12 оперативной памяти, арифметический блок 13 и блок 14 управляющей памяти. 2 з.п. ф-лы. 4 ил. (О 00 1чЭ сл ел 00 ;о 
фцг.2
Фиг.д
ФигМ
| Устройство для считывания графической информации | 1975 |
|
SU525132A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для подсчета объектов,расположенных беспорядочно | 1983 |
|
SU1129633A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
