ватель содержит кронштейн 1 с установленными на нем излучателями 2, фотоприемниками 3 и платой А усилителей, установочные винты 5, корпус 6, подшипники 7, входной вал 8, кодовый диск 9, диафрагму 10, установочные винты 11 и 12, соединительное звено 13, состоящее из дополнительного корпуса 14, вкладыша 15, шариков 16, упругой пластины 17 и винта 18 (подст- роечного), и установочные винты 19. Цель изобретения достигается тем, что соединительное звено 13, закрепленное на корпусе 6 диаметрально кронштейну 1, позволяет сократить длину преобразователя, а кронштейн 1, закрепленньй на корпусе 6 с помощью установочных
1
Изобретение относится к системе автоматического контроля и регулирования и может быть использовано в качестве устройств обратной связи в позиционных системах программного уп равления роботов.
Целью изобретения является упрощение конструкции, уменьшение габаритов и повьш1ение надежности преобразовате- ля.
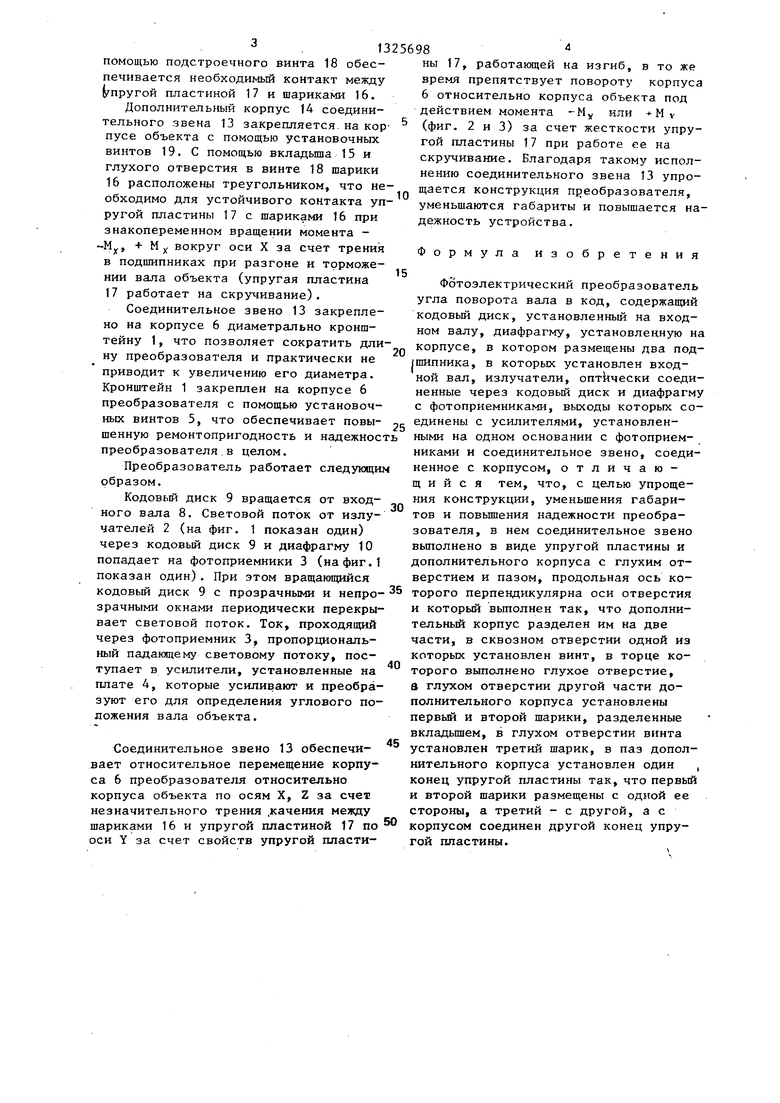
На фиг. 1 приведены элементы предлагаемого преобразователя; на фиг. 2 разрез А-А на фиг. 1, (соединительное звено); на фиг. 3 - вид Б на фиг. 1.
Фотоэлектрический преобразователь содержит кронштейн 1 с установленныг и на нем излучателями 2, фотоприемниками 3 и платой усилителей 4, установочные винты 5, корпус 6, подшипники 7, входной вал 8, кодовый диск 9, диафрагму 10, установочные винты 11 и 12, соединительное звено 13,,состоящее из дополнительного корпуса 14, вкладьша 15, шариков 16, упругой плас тины 17 и винта 18 (подстроечного) ,,и установочные винты 19.
Подшипники 7, установленные на входном валу 8 в корпусе 6, обеспечивают жесткое взаимодействие между корпусом 6 И кодовым диском 9, поэтому зазор между кодовым диском 9 и диафрагмой 10, жестко закрепленной в
винтов 5, обеспечивает п овышенную ремонтопригодность, и надежность преобразователя. Соединительное звено 13 обеспечивает етносительное перемещение корпуса 6 преобразователя относительно корпуса объекта по осям X за счет незначительного трения качения между шариками 16 и упругой пластиной 17 по оси У, перпендикулярной плоскости расположения осей X, за счет свойств упругой пластины 17, работающей на изгиб, в то же время препятствует повороту корпуса 6 относительно корпуса объекта под действием момента-Му « за счет жесткости упругой пластины 17 при работе ее на скручивание. 3 ил.
корпусе 6, остается постоянным (это. необходимое условие высокой точности преобразователя), в то же время корпус 6 эффективно отслеживает осевые и радиальные перемещения вала объек- та на котором жестко закреплен входной вал 8 преобразователя с помощью установочного винта 11. Соединительное звено 13 обеспечивает механическую связь корпуса объекта и корпуса 6 преобразователя.
В дополнительном корпусе 14 соединительного звена 13 выполнено глухое отверстие и паз, продольная ось которого перпендикулярна оси отверстия и который выполнен так, что дополнительный корпус 14 разделен им на две части, в сквозном отверстии одной из которых установлен винт 18, в торце которого выполнено глухое отверстие, в глухом отверстии другой части дополнительного корпуса 14 установлены первый и второй шарики 16, разделенные вкладышем 15, в глухом отверстии винта 18 установлен третий шарик 16, в паз дополнительного корпуса 14 установлен один конец упругой пластины 17 так, что первый и второй шарики 16 размещены с одной ее стороны, а третий - с другой, а с корпусом 6 соединен другой конец упругой пластины 17 с покощьта установочных винтов 12. С
10
15
20
25
помощью подстроечного винта 18 обеспечивается необходимый контакт между б пругой пластиной 17 и шариками 16.
Дополнит ел корпус 14 соединительного звена 13 закрепляется, на корпусе объекта с помощью установочных винтов 19. С помощью вкладыша 15 и глухого отверстия в винте 18 шарики
16расположены треугольником, что необходимо для устойчивого контакта упругой пластины 17 с шариками 16 при знакопеременном вращении момента М, + М jf вокруг оси X за счет трения в подшипниках при разгоне и торможении вала объекта (упругая пластина
17работает на скручивание). Соединительное звено 13 закреплено на корпусе 6 диаметрально кронштейну 1, что позволяет сократить длину преобразователя и практически не
приводит к увеличению его диаметра. Кронштейн 1 закреплен на корпусе 6 преобразователя с помощью установочных винтов 5, что обеспечивает повышенную ремонтопригодность и надежность преобразователя.в целом.
Преобразователь работает следующим образом.
Кодовый диск 9 вращается от входного вала 8. Световой поток от излучателей 2 (на фиг. 1 показан один) через кодовый диск 9 и диафрагму 10 попадает на фотоприемники 3 (на фиг. 1 показан один). При этом вращающийся кодовый диск 9 с прозрачными и непро- зрачными окнами периодически перекрывает световой поток. Ток, проходящий через фотоприемник 3, пропорциональный падающему световому потоку, поступает в усилители, установленные на лате 4, которые усиливают и преобразуют его для определения углового поожения вала объекта.
Соединительное звено 13 обеспечиает относительное перемещение корпуа 6 преобразователя относительно орпуса объекта по осям X, Z за счет езначительного трения качения между ариками 16 и упругой пластиной 17 по си Y за счет свойств упругой пласти30
40
10
15
20
25
30
0
ны 17, работающей на изгиб, в то же время препятствует повороту корпуса 6 относительно корпуса объекта под действием момента -My или у (фиг. 2 и 3) за счет жесткости упругой пластины 17 при работе се на скручивание. Благодаря такому исполнению соединительного звена 13 упрощается конструкция преобразователя, уменьшаются габариты и повышается надежность устройства.
Формула изобретения
Фотоэлектрический преобразователь угла поворота вала в код, содержащий кодовый диск, установленный на входном валу, диафрагму, установленную на корпусе, в котором размещены два под- (шипника, в которых установлен входной вал, излучатели, оптически соединенные через кодовый диск и диафрагму с фотоприемниками, выходы которых соединены с усилителями, установленными на одном основании с фотоприемниками и соединительное звено, соединенное с корпусом, отличающийся тем, что, с целью упрощения конструкции, уменьшения габаритов и повьшгения надежности преобразователя, в нем соединительное звено выполнено в виде упругой пластины и дополнительного корпуса с глухим отверстием и пазом, продольная ось которого перпендикулярна оси отверстия и который вьтолнен так, что дополнительный корпус разделен им на две части, в сквозном отверстии одной из которых установлен винт, в торце которого выполнено глухое отверстие, а глухом отверстии другой части дополнительного корпуса установлены первый и второй шарики, разделенные вкладьш1ем, в глухом отверстии винта установлен третий шарик, в паз дополнительного корпуса установлен один , конец упругой пластины так, что первый и второй шарики размещены с одной ее стороны, а третий - с другой, а с корпусом соединен другой конец упругой пластины.
W17
9иг.
18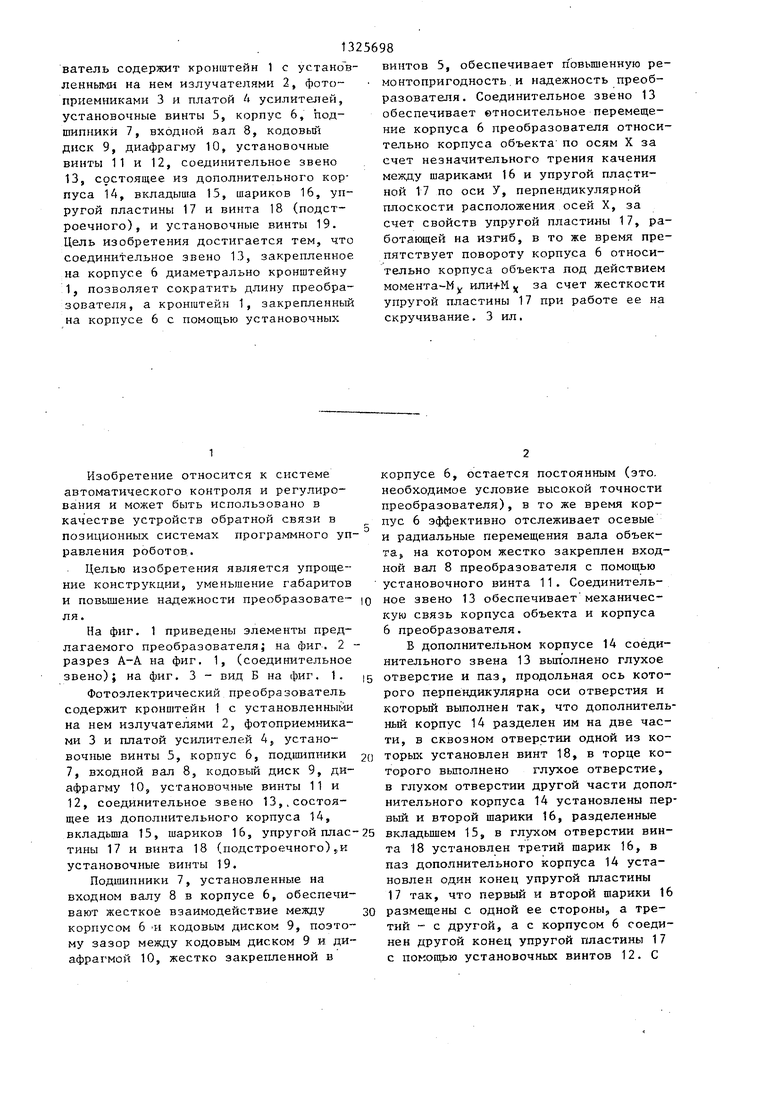
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1985 |
|
SU1269261A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1160568A1 |
| Преобразователь перемещения в код | 1982 |
|
SU1059598A1 |
| Оптоэлектронный цифровой преобразователь угла | 2018 |
|
RU2694759C1 |
| ЭЛЕКТРОУТЮГ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2043442C1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1103274A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2029429C1 |
| Преобразователь угловых положений вала | 1984 |
|
SU1168802A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА /ВАРИАНТЫ/ | 2003 |
|
RU2243625C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
Изобретение относится к системам автоматического контроля и регулирования и может быть использовано в качестве устройств обратной связи в позиционных системах программного управления роботов. Целью изобретения является упрощение конструкции, уменьшение габаритов и повьшение надежности фотоэлектрического преобразователя угла поворота вала в код. Преобразо(Л CAD Ю СП О) со 00 Pus.1
ВидБ
12
-My
9иг.З
Редактор И. Шулла
Составитель Е. Бударина
Техред И.Поповяч Корректор Г. Решетник
Заказ 3125/56 Тираж 901Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
| Фотоэлектрические преобразователи информации./Под ред | |||
| Л.Н | |||
| Прёсну- хина | |||
| М.: Машиностроение, 1974, с | |||
| Прибор для исправления снимков рельефа местности | 1921 |
|
SU301A1 |
| Фотоэлектрические преобразователи информации./Под ред | |||
| Л.Н | |||
| Преснухина | |||
| М.: Машиностроение, 1974, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |
