Изобретение относится к телеизмерениям и может быть использовано для построения многоканальных систем телемеханики рассредоточенных удаленны объектов.
Цель изобретения - повышение достоверности передачи результатов измерений.
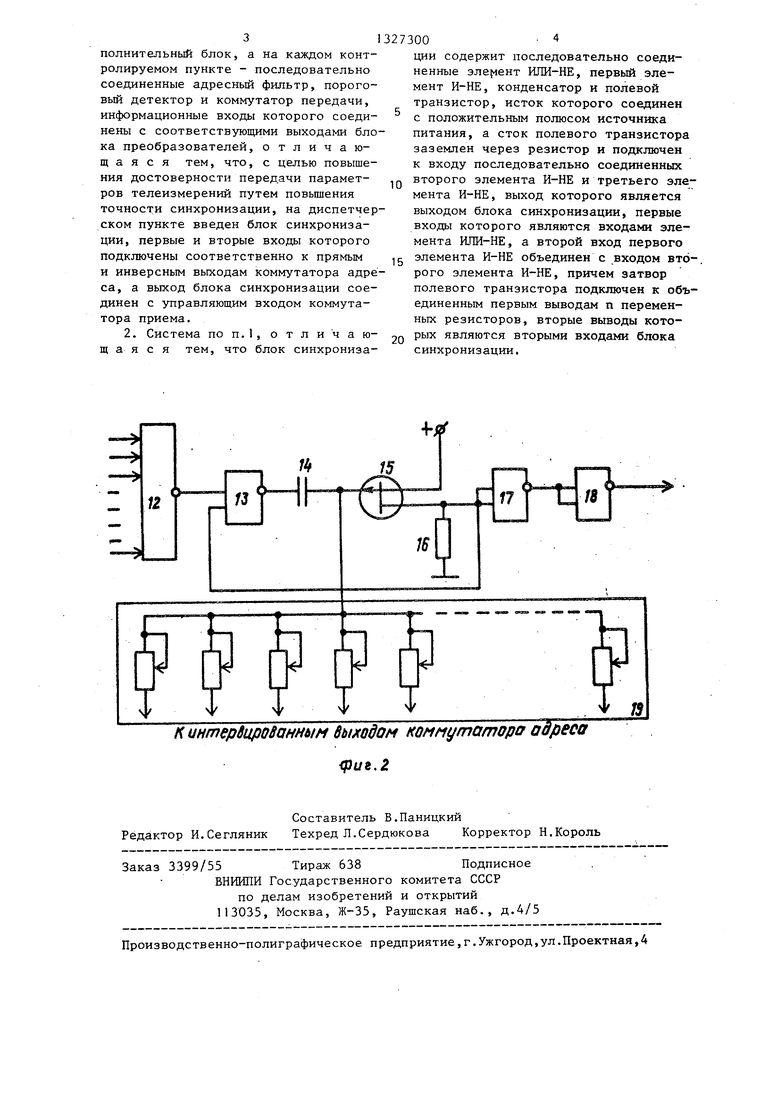
На фиг.1 приведена структурная схема многоканальной системы телеизмерений; на фиг.2 - выполнение блока синхронизации.
Устройство (фиг.1) содержит диспетчерский пункт 1, коммутатор адреса 2, блок 3 адресных генераторов, блок 4 синхронизации, коммутатор приема 5, исполнительный блок 6,п контролируемых пунктов 7, каждый из которых содержит адресный фильтр 8, пороговый детектор 9, коммутатор передачи 10 и блок 11 преобразователей.
Блок 4 синхронизации (фиг.2) содержит элемент ИЛИ-НЕ 12, первый элемент И-НЕ 13, конденсатор 14, полевой транзистор 15, резистор 16, второй элемент И-НЕ 17, третий элемент И-НЕ 18 и п переменных резисторов 19.
Устройство работает следующим образом.
Коммутатор адреса 2 генерирует последовательность импульсов, которые поочередно подключают выходы генераторов блока 3 к каналу связи. Очередная адресная посылка вьщеляется соответствующим адресным фильтром 8 на очередном контролируемом пункте, детектируется пороговым детектором 9 и с задержкой, определяемой постоянной времени адресного фильтра 8, запускает коммутатор передачи 10 контролируемого пункта 7, который подключает поочередно выходы блока 11 преобразователей к каналу связи.
Аналогично осуществляется передача информации с других контролируемых пунктов 7, отличие которых состоит лишь в частоте настройки адресного фильтра 8 и соответственно в величине его постоянной времени (задержки) .
Назначение блока 4 синхронизации состоит в том, чтобы задержать запуск коммутатора приема 5 диспетчерского пункта 1 на величину, определяемую временем задержки запуска коммутатора передачи 10 контролируемого пункта 7, которая, в свою очередь, зависит от параметров адресного филь0
5
5
0
5
0
5
0
5
тра 8, удаленности от диспетчерского пункта 1, условий-эксплуатации и т.д.
Работа блока 4 синхронизации осуществляется следующим образом. Им-, пульсы коммутатора адреса 2 объединяются и инвертируются на многовхор;о- вой схеме ИЛИ-НЕ 12. Сигнал на выходе первого элемента И-НЕ 13 подается на времязадающую цепь, образованную конденсатором 14 и одним из переменных резисторов 19. Каждое сочетание данных элементов определяет . соответствующую крутизну спада напряжения на затворе и момент открытия унитрона и, в конечном итоге, длительность задержки t , Задержанные импульсы инвертируются и пост;7пают в цепь запуска коммутатора приема 5.
Автоматическое включение в работу соответствующего переменного резистора 19 при циклическом опросе контролируемых пунктов 7 обеспечивается путем подключения переменных резисторов 19 к инвертированным выходам коммутатора адреса 2. Результатом такого включения является то, что в каждой позиции коммутатора адреса 2 на одном из входов элемента 12 устанавливается уровень логической единицы, а на одном из времязадающих переменных резисторов 19, подключенных к инвертированным выходам коммутатора адреса 2 устанавливается уровень логического нуля.
Таким образом, время задержки блока 4 изменяется автоматически под действием очередного И1 шульса коммутатора адреса 2 в зависимости от того,, какой из времязадающих переменных резисторов 19 подключен к точке, в которой установлен уровень х(огичес- кого нуля. С учетом того обстсятель- ства, что время задержки в каядой позиции коммутатора 2 адреса может быть установлено достаточно точно, каждая адресная посылка одновременно запускает коммутаторы 5 и 10 приема и передачи (фиг.1), обеспечивая строгую цикловзто синхронизацию системы.
Формула изобретения
1. Многоканальная система телеизмерений, содержащая на диспетчерском пункте последовательно соединенные коммутатор адреса и блок адресных генераторов, а также последовательно соединенные коммутатор приема и исполнительный блок, а на каждом контролируемом пункте - последовательно соединенные адресный фильтр, пороговый детектор и коммутатор передачи, информационные входы которого соединены с соответствующими выходами бло ка преобразователей, отличающаяся тем, что, с целью повышения достоверности передачи параметров телеизмерений путем повышения точности синхронизации, на диспетчер ском пункте введен блок синхронизации, первые и вторые входы которого подключены соответственно к прямым и инверсным выходам коммутатора адреса, а выход блока синхронизации соединен с управляющим входом коммутатора приема.
2. Система по п.1, отличающаяся тем, что блок синхрониза27300 4
ции содержит последовательно соединенные эле{4ент ИЛИ-НЕ, первый элемент И-НЕ, конденсатор и полевой транзистор, исток которого соединен с положительным полюсом источника питания, а сток полевого транзистора заземлен через резистор и подключен к входу последовательно соединенных
1Q второго элемента И-НЕ и третьего элемента И-НЕ, выход которого является выходом блока синхронизации, первые входы которого являются входами элемента ИЛИ-НЕ, а второй вход первого
,5 элемента И-НЕ объединен с входом второго элемента И-НЕ, причем затвор полевого транзистора подключен к объединенным первым выводам п переменных резисторов, вторые выводы кото2Q рых являются вторыми входами блока синхронизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система телеизмерений | 1981 |
|
SU1029421A1 |
| Устройство для передачи и приема сигналов | 1981 |
|
SU964692A1 |
| Устройство для автоматического учета и контроля режимов потребления электроэнергии | 1988 |
|
SU1638642A1 |
| Устройство для приема и передачи телеинформации | 1977 |
|
SU696519A1 |
| Устройство для сбора и обработки данных с рассредоточенных объектов | 1977 |
|
SU674076A1 |
| Устройство телемеханики | 1978 |
|
SU763944A1 |
| Устройство для приема и регистрации телесигналов | 1978 |
|
SU698031A1 |
| Комплексное телемеханическое устройство | 1972 |
|
SU525147A1 |
| Устройство пункта управления системы телемеханики | 1986 |
|
SU1374265A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |
Изобретение относится к телеизмерению. Цель изобретения - повышение достоверности передачи результатов измерений. Система содержит диспетчерский пункт 1, состоящий из коммутатора 2 адреса, блока адресных генераторов 3, блока синхронизации (БС) 4, коммутатора 5 приема и исполнительного блока 6, а также п контролируемых пунктов 7, состоящих каждый из адресного фильтра 8, порогового детектора 9, коммутатора 10 передачи и блока преобразователей 11. В системе осуществляется передача информации с пунктов 7, которые отличаются по частоте настройки фильтра 8 и соответственно по величине его постоянной времени (задержки). БС 4 задерживает запуск коммутатора 5 пункта 1 на величину, определяемую временем задержки запуска коммутатора 10 пункта 7, которая в свою очередь зависит от параметров фильтра 8, удаленности от пункта 1, условий эксплуатации и т.д. Цель достигается путем повьппе- ния точности синхронизации с помощью введенного БС 4. Система по п.2 ф-лы отличается выполнением БС 4, дан его чертеж. 1 з.п. ф-лы, 2 ил. i (О ос to о
К интердироЗаннлт выходом коммутаторо odfieca
р4/е.г
Составитель В.Паницкий Редактор И.Сегляник Техред Л.Сердюкова Корректор Н.Король
Заказ 3399/55 Тираж 638Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
| Система многоканальной передачи сигналов | 1978 |
|
SU698144A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Многоканальная система телеизмерений | 1981 |
|
SU1029421A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
