Изоб)етенне относится к рабочему оборудоззанию для кюветовосстанови- тельных работ, предназначенному для очистки, либо для восстановления кюветов дорог.
Целью изобретения является повышение производительности путем обеспечения непрерывной работы при изменении параметров кюветы.
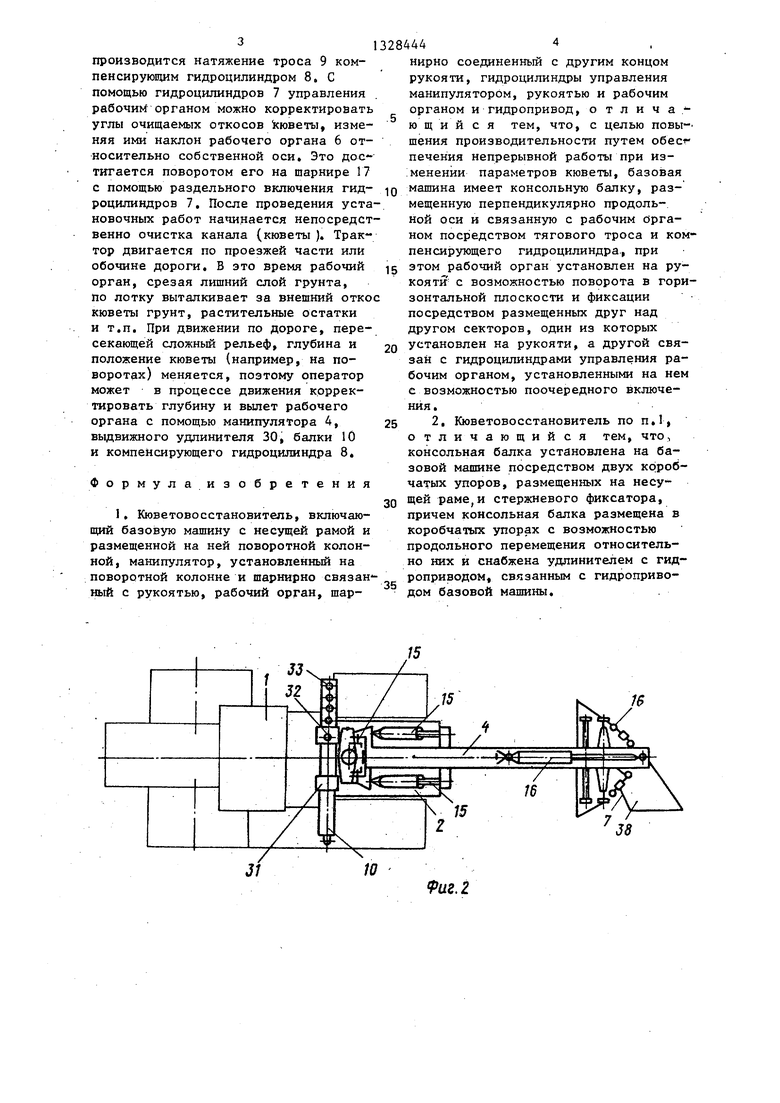
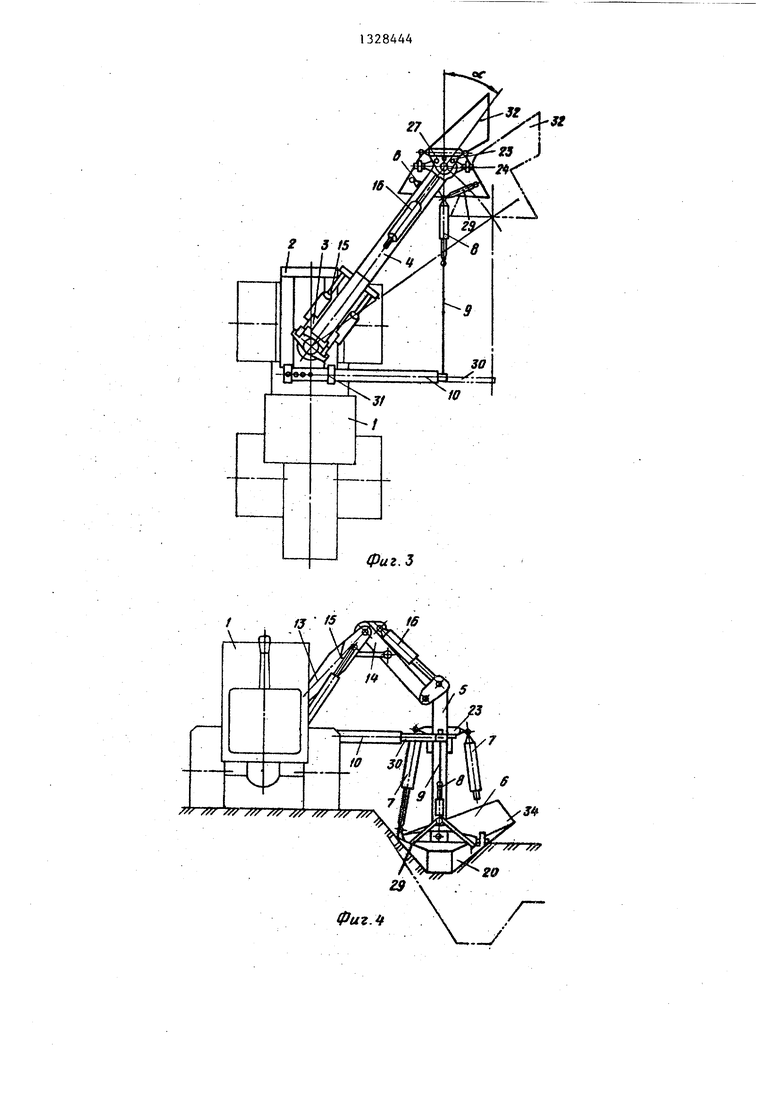
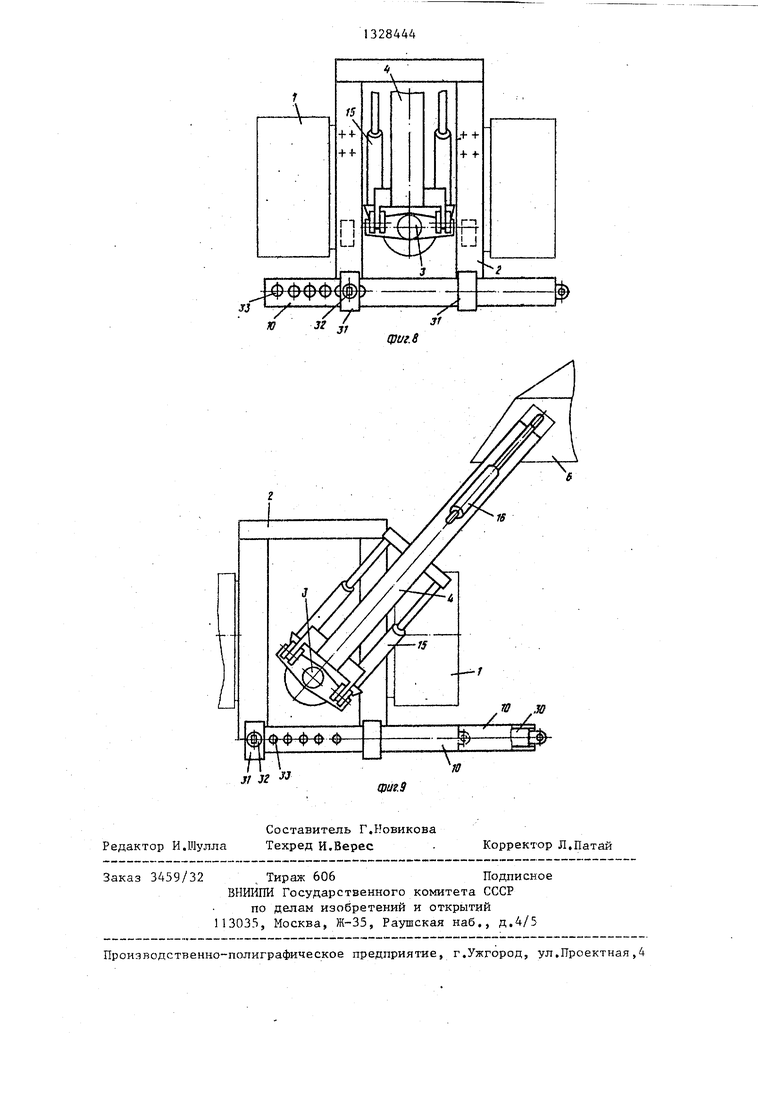
На фиг.1 изображен кюветовосста- новитель в транспортном положении, вид сбоку; на фиг.2 - то же, вид сверху; на фигi3 - кюветовосстанови- тель в рабочем положении, вид сверху; на фиг.4 - кювета с установленным п него рабочим органом, поперечное сечение; на фиг.5 - рукоять манипулятора с рабочим органом, вид сбоку; на фиг.6 - то же, вид сзади; на фиг.7 - то же, вид сверху; .на фиг.8 - рама с ко нсольной балкой и манипулятором, вид сверху; на фиг.9 то же, рабочее положение.
Юоветовоостановитель выполнен на базе трактора и состоит из установленной на задней полураме трактора 1 несущей рамы 2 (фиг. -4), В несущей раме 2 установлена поворотная колонна 3, на которой закреплен двухзвенный гидравлический манипулятор 4 с рукоятью 5. На рукояти 5 подвешен рабочий орган 6, связанный посредством гидроцилиндров 7 управления ковшом с рукоятью 5 и компенсиру Ю1ЦИМ гидроцилиндром 8 .с тяговым тросом 9. Трос 9 закреплен на конце консольной балки lO, смонтированной на несущей раме 2 поперек оси трактора 1. В транспортном положении (фиг.О конец троса 9 крепится в проушине 11 несущей рамы 2, а компенсирующий гидроцилиндр 8 - в кронштейне 12 рукояти 5. Манипулятор 4 состоит из двух звеньев 13 и 14, закреп- леншлх шарнирно на поворотной колонне 3 и управляемых с помощью гидроцилиндров 15 управления манипулятором. На конце звена 14 закреплена шарнирно рукоять 5, управляемая гидроцилиндром 16, В нижней части рукояти 5 закреплен шарнир 17, имеющий три степе ш свободы (карданного типа связанный через одну ось (горизонтальную) с несущей осью 18, которая связана с проушинами 19 рабочего органа (фи1 .5 - 7). С тыльной части рабоч Л о opj aiia 6 в верхней части ,и 20 с помощью сферических
5
0
5
шарниров закреплены гидроцилиндры 7 управления ковшом и буксировочные гребенки 21 и 22. Верхние проушины гидроцилиндров 7 с помощью сферических шарниров связаны с сектором 23, который зафиксирован с помощью оси 24 на неподвижном секторе 25, Неподвижный сектор 25 с помощью уголков 26 закреплен на рукояти 5, В секторах 23 и 25 выполнены соосные отверстия 27 под фиксатором 28, который взаимно фиксирует секторы 23 и 25 с заданным углом с , который определяется при установке рабочего органа 6 относительно оси манипулятора 4, В передней части рабочего органа 6 с помощью тяг 29 шарнирно закреплен компенсирующий гидроцилиндр 8, к которому прикреплен тяговый трос 9, другой конец которого присоединен к свободному концу консольной балки 10, Балка 10 представляет собой (фиг.8 и 9) пустотелый стержень коробчатой 5 конструкции, внутри которой размещен выдвижной удлинитель 30 с гидравлическим приводом (не показан), Балка 10 зафиксирована с возможностью продольного перемещения в двух коробчатых упорах 31, которые жестко закреплены на раме 2. В одном из упоров 31 выполнены отверстия под стержневой фиксатор 32, который установлен в одно из отверстий 33 балки 10 в зависимости от длины, на которую она выдвинута относительно упоров 31, Рабочий орган 6 имеет форму ковша с передней режущей кромкой U -образной формы, задняя часть рабочего органа 6 образует лоток 34, ось которого развернута в сторону и вверх относительно оси рабочего органа.
.Кюветовосстановитель работает следующим образом,
В зависимости от глубины канала (кюветы) и его расположения относительно поверхности дорожного покры - тия выставляется угол d- угол оси рабочего органа 6 относительно оси манипулятора 4 с помощью секторов 23 и 25 с последующим их стопорением относительно друг друга фиксатором 28 (фиг,3 и 4), Тяговый трос 9 располагается по оси рабочего органа 6 и параллельно оси базового трактора 1 с помощью вьщвижеиия балки 10, С помощью манипулятора 4 выставляется необходимая глубина, на которой должен работать рабочий орган 6, Затем
0
0
5
0
5
производится натяжение троса 9 компенсирующим гидроцилиндром 8. С помощью гидроцилиндров 7 управления рабочим органом можно корректировать углы очищаемых откосов kroaeTbi, изменяя ими наклон рабочего органа 6 относительно собственной оси. Это достигается поворотом его на шарнире 17 с помощью раздельного включения гидроцилиндров 7, После проведения установочных работ начинается непосредственно очистка канала (кюветы ). Трактор двигается по проезжей части или обочине дороги, В это время рабочий орган, срезая лишний слой грунта, по лотку выталкивает за внешний отко кюветы грунт, растительные остатки и т,п. При движении по дороге, пересекающей сложный рельеф, глубина и положение кюветы (например, на поворотах) меняется, поэтому оператор может в процессе движения корректировать глубину и вылет рабочего органа с помощью манипулятора 4, выдвижного удлинителя 30, балки 10 и компенсирующего гидроцилиндра 8,
Формулаизобретения
1, Кюветовосстановитель, включающий базовую машину с несущей рамой и размещенной на ней поворотной колонной, манипулятор, установленный на поворотной колонне и шарнирно связанный с рукоятью, рабочий орган, шар
284444
нирно соединенный с другим концом рукояти, гидроцилиндры управления манипулятором, рукоятью и рабочим органом и гидропривод, отличающий с я тем, что, с целью повы- шения производительности путем обес печения непрерывной работы при из- :менении параметров кюветы, базовая
1Q машина имеет консольную балку, размещенную перпендикулярно продольной оси и связанную с рабочим органом посредством тягового троса и компенсирующего гидроцилиндра., при
15 этом рабочий орган установлен на рукояти с возможностью поворота в горизонтальной плоскости и фиксации посредством размещенных друг над другом секторов, один из которых
установлен на рукояти, а другой связан с гидроцилиндрами управления рабочим органом, установленными на нем с возможностью поочередного включения,
2, Кюветовосстановитель по п,1, отличающийся тем, что, консольная балка установлена на базовой машине посредством двух коробчатых упоров, размещенных на несущей раме,и стержневого фиксатора, причем консольная балка размещена в коробчатых упорах с возможностью продольного перемещения относительно них и снабжена удлинителем с гидроприводом, связанным с гидроприводом базовой машины.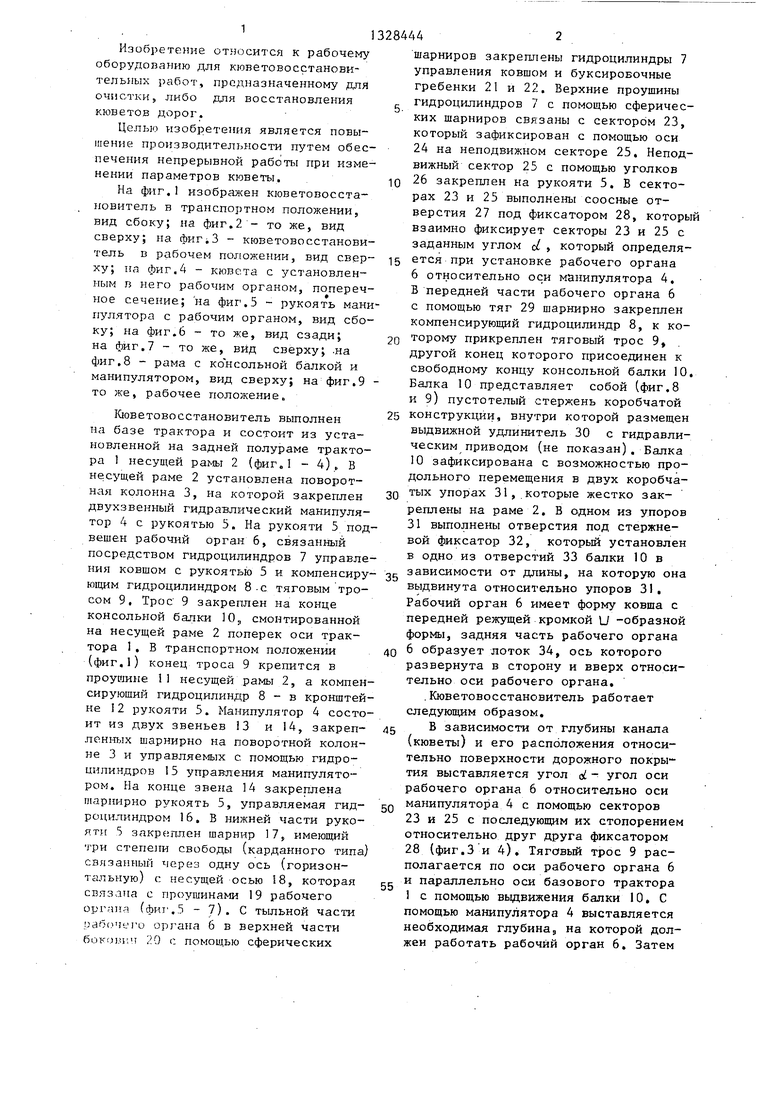
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование кюветовосстановителя | 1988 |
|
SU1553625A1 |
| СЦЕПКА ПРИЦЕПНАЯ ДВУХРЯДНАЯ ДЛЯ БОРОН | 2013 |
|
RU2535259C1 |
| ИНЖЕНЕРНАЯ МАШИНА РАЗГРАЖДЕНИЯ | 1994 |
|
RU2091694C1 |
| Прицеп для перевозки на раме тягача | 2022 |
|
RU2789565C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2086082C1 |
| Фреза для дорожных обочин | 2021 |
|
RU2756033C1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| Лесомелиоративная машина | 1987 |
|
SU1469040A1 |
Изобретение относится к рабочему оборудованию для кюветовосстано- вительных работ. Цель - повьщение производительности путем обеспечения непрерывной работы для изменения параметров кюветы. Для этого на базовой машине 1 смонтирована консоль-, ная балка 10, связанная с рабочим органом 6 посредством тягового троса 9 и гидроцилиндра (ТЦ) 7 управле-. ния рабочим органом 6. Последний установлен на рукояти 5 с возможностью поворота в горизонтальной плоскости и фиксации посредством размещенных друг над другом секторов. Сдин из секторов связан с ГЦ 7. С помощью секторов в зависимости от глубины канала устанавливается угол рабоче- .- го органа 6, Необходимая глубина устанавливается манипулятором. Изменение угла наклона рабочего органа 6 относительно его оси осуществляется ГЦ 7, что позволяет корректировать углы очищаемых откосов. 1 з.п. ф-лы, 9 ил. i (Л и&. 1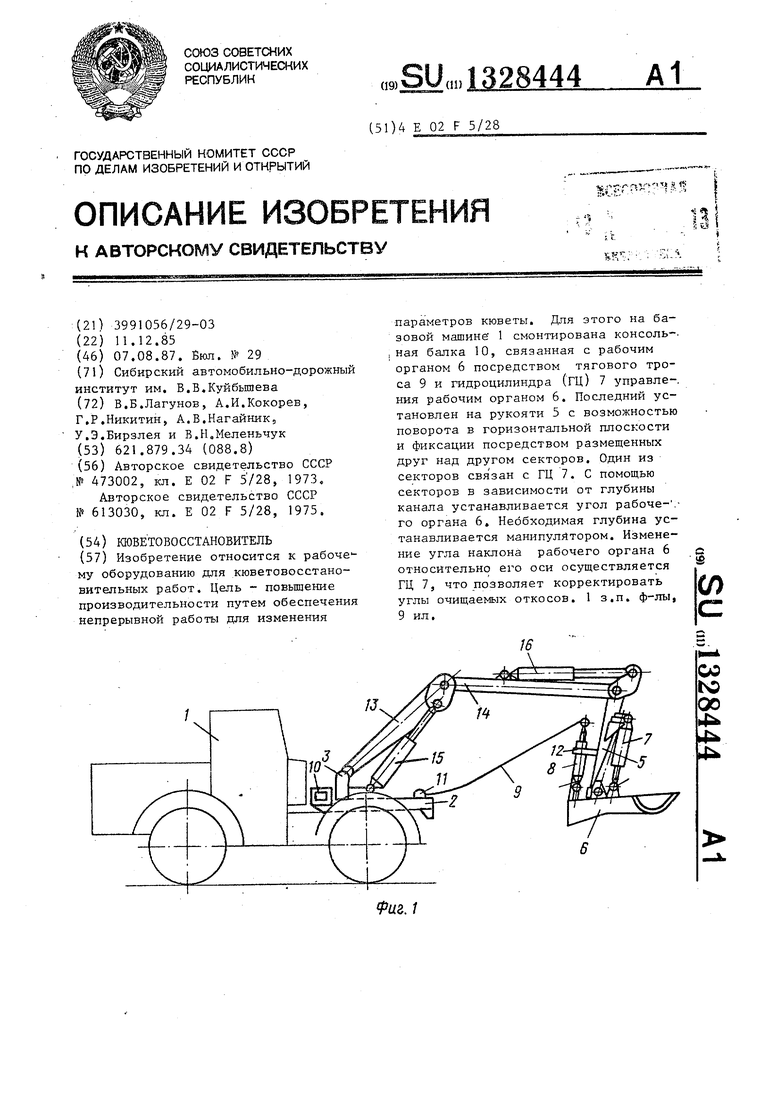
J8
PUZ.Z
фиг.З
ФигЛ
IS
3
го
Фиг.6
vrJ4
иг.7
Л7
фиг. 6
31 зг 33
mut9
Редактор И.Шулла
Составитель Г,Новикова Техред И.Верес
Заказ 3459/32 Тираж 606Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Л.Патай
| Каналоочиститель | 1973 |
|
SU473002A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
